Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Unit 7 DesignofshaftscouplingsDokument45 SeitenUnit 7 DesignofshaftscouplingssuswagatNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- 2003, 94665723-New-energy-technologies-Issue-12 PDFDokument81 Seiten2003, 94665723-New-energy-technologies-Issue-12 PDFJosefina SilveyraNoch keine Bewertungen
- Screwed JointsDokument39 SeitenScrewed JointssuswagatNoch keine Bewertungen
- Unit5 Design of KeysDokument32 SeitenUnit5 Design of Keyssuswagat75% (4)
- Reliability Based DesignDokument11 SeitenReliability Based DesigntohemaNoch keine Bewertungen
- Divine Creation - BigbangDokument3 SeitenDivine Creation - BigbangCess AlfonsoNoch keine Bewertungen
- Edexcel IAS Physics Unit 2 Physics at Work Topic 2 The Sound of Music Test With Mark Scheme 16 - 17Dokument32 SeitenEdexcel IAS Physics Unit 2 Physics at Work Topic 2 The Sound of Music Test With Mark Scheme 16 - 17Paul BurgessNoch keine Bewertungen
- Hotel Design ConsiderationsDokument6 SeitenHotel Design ConsiderationsAlther DabonNoch keine Bewertungen
- Maintenance Engineer PDFDokument4 SeitenMaintenance Engineer PDFMasroor RasoolNoch keine Bewertungen
- Faculty Profile Formate For AutonomousDokument2 SeitenFaculty Profile Formate For AutonomoussuswagatNoch keine Bewertungen
- Financial security with risk transferDokument53 SeitenFinancial security with risk transfersuswagatNoch keine Bewertungen
- Circular Pinclick BangaloreDokument1 SeiteCircular Pinclick BangaloresuswagatNoch keine Bewertungen
- Kallam Haranadhareddy Institute of TechnologyDokument4 SeitenKallam Haranadhareddy Institute of TechnologysuswagatNoch keine Bewertungen
- Kallam Haranadhareddy Institute of Technology: Department of Mechanical EngineeringDokument2 SeitenKallam Haranadhareddy Institute of Technology: Department of Mechanical EngineeringsuswagatNoch keine Bewertungen
- Citd Webinar Fee RecieptDokument1 SeiteCitd Webinar Fee RecieptsuswagatNoch keine Bewertungen
- Chaitanya Godavari Bank Aadhar Seva Kendram Token ScheduleDokument1 SeiteChaitanya Godavari Bank Aadhar Seva Kendram Token SchedulesuswagatNoch keine Bewertungen
- Kumar Pumps & KCP Sugars Permission LetterDokument2 SeitenKumar Pumps & KCP Sugars Permission LettersuswagatNoch keine Bewertungen
- Fabricating a Vertical Axis Wind TurbineDokument5 SeitenFabricating a Vertical Axis Wind TurbinesuswagatNoch keine Bewertungen
- Fullerton PaymentDokument1 SeiteFullerton PaymentsuswagatNoch keine Bewertungen
- RivettsDokument71 SeitenRivettssuswagatNoch keine Bewertungen
- DOM Cos POsDokument1 SeiteDOM Cos POssuswagatNoch keine Bewertungen
- 16.02.2017 Part-1Dokument6 Seiten16.02.2017 Part-1suswagatNoch keine Bewertungen
- ICGDokument18 SeitenICGsuswagatNoch keine Bewertungen
- Mechanics of Solids Course <40Dokument16 SeitenMechanics of Solids Course <40suswagatNoch keine Bewertungen
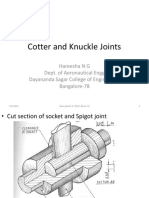
- Cotter and Knuckle Joints: Hareesha N G Dept. of Aeronautical Engg Dayananda Sagar College of Engineering Bangalore-78Dokument7 SeitenCotter and Knuckle Joints: Hareesha N G Dept. of Aeronautical Engg Dayananda Sagar College of Engineering Bangalore-78suswagatNoch keine Bewertungen
- Mos Lab ManualDokument57 SeitenMos Lab ManualsuswagatNoch keine Bewertungen
- Mechanics of Solids Course <40Dokument16 SeitenMechanics of Solids Course <40suswagatNoch keine Bewertungen
- ANSYS Final ManualDokument48 SeitenANSYS Final ManualsuswagatNoch keine Bewertungen
- Designofshaftscouplings PPT 121011041653 Phpapp02Dokument45 SeitenDesignofshaftscouplings PPT 121011041653 Phpapp02suswagatNoch keine Bewertungen
- Cad Lab ManualDokument8 SeitenCad Lab ManualsuswagatNoch keine Bewertungen
- Catia Manuals NewDokument17 SeitenCatia Manuals NewsuswagatNoch keine Bewertungen
- FM&HM ManualDokument2 SeitenFM&HM ManualsuswagatNoch keine Bewertungen
- Rose TeamdevDokument150 SeitenRose TeamdevalexmursaNoch keine Bewertungen
- Kom Course Handout GSB 24-05-2017Dokument9 SeitenKom Course Handout GSB 24-05-2017suswagatNoch keine Bewertungen
- Rose REI Guide PDFDokument156 SeitenRose REI Guide PDFsuswagatNoch keine Bewertungen
- Chapter 04Dokument3 SeitenChapter 04gebreNoch keine Bewertungen
- Chapter 1 Introduction To Physics StudentDokument18 SeitenChapter 1 Introduction To Physics StudentAizat ArifNoch keine Bewertungen
- Cosmology, Physics and Philosophy: Benjamin Gal-OrDokument74 SeitenCosmology, Physics and Philosophy: Benjamin Gal-Orapi-3835692Noch keine Bewertungen
- Mathematical Excalibur - Homothety PDFDokument4 SeitenMathematical Excalibur - Homothety PDFAlex YuNoch keine Bewertungen
- Homework 6 solutionsDokument3 SeitenHomework 6 solutionsAntonio Abel Mejìa DìazNoch keine Bewertungen
- Parasitic DragDokument4 SeitenParasitic DragsarfraazNoch keine Bewertungen
- Debayering DemystifiedDokument5 SeitenDebayering Demystifiedtech_dfNoch keine Bewertungen
- Electrical Standards and ConventionsDokument23 SeitenElectrical Standards and ConventionsAngelika ParedesNoch keine Bewertungen
- Academy: PYQ Tagged E + M Question Type CoveredDokument30 SeitenAcademy: PYQ Tagged E + M Question Type Coveredraga harshiniNoch keine Bewertungen
- A-Frame Calculation Without CoverDokument6 SeitenA-Frame Calculation Without CoverimsayaaNoch keine Bewertungen
- HW5 Work and EnergyDokument20 SeitenHW5 Work and EnergyGina G. HarrisNoch keine Bewertungen
- IJIRAE::An Overviewof Analysis, Measurement and Modelling of Dynamics Properties of Composite Materials Using Oberst Beam MethodDokument4 SeitenIJIRAE::An Overviewof Analysis, Measurement and Modelling of Dynamics Properties of Composite Materials Using Oberst Beam MethodIJIRAE- International Journal of Innovative Research in Advanced EngineeringNoch keine Bewertungen
- A New Pixel-Wise Mask For Watermarking: Corina NafornitaDokument8 SeitenA New Pixel-Wise Mask For Watermarking: Corina NafornitaSairam SaiNoch keine Bewertungen
- Best Practices 1Dokument139 SeitenBest Practices 1valli75Noch keine Bewertungen
- INChO2012 Solution of Previous Year Question Papers of Indian National Chemistry Olympiad (INChO)Dokument9 SeitenINChO2012 Solution of Previous Year Question Papers of Indian National Chemistry Olympiad (INChO)Akshay PandeyNoch keine Bewertungen
- Journal of Qafqaz University No - 25Dokument160 SeitenJournal of Qafqaz University No - 25ramil2009Noch keine Bewertungen
- Motor GeneratorsDokument15 SeitenMotor GeneratorsAnonymous OuY6oAMggxNoch keine Bewertungen
- Algebra Second SlidesDokument370 SeitenAlgebra Second Slidesrayyanibrahimkansangbata2005Noch keine Bewertungen
- Pre-entry Maths Assessment: Key Questions AnsweredDokument10 SeitenPre-entry Maths Assessment: Key Questions AnsweredCanioNoch keine Bewertungen
- 805 Model Answer Paper Summer 2018 PDFDokument26 Seiten805 Model Answer Paper Summer 2018 PDFDipu Kumar50% (2)
- Lesson2 1-LightDokument4 SeitenLesson2 1-LightGrace06 LabinNoch keine Bewertungen
- DC 6 Digital Gov Data Sheet PDFDokument4 SeitenDC 6 Digital Gov Data Sheet PDFCarlos MajanoNoch keine Bewertungen
- TLC Analysis of Siling Labuyo Extract ComponentsDokument3 SeitenTLC Analysis of Siling Labuyo Extract ComponentsJan Eric Balete0% (1)
- AssignmentDokument3 SeitenAssignmentPrakhar0112Noch keine Bewertungen