Das könnte Ihnen auch gefallen
- Mechanization On Harvesting and Infied Collection of Oil PalmDokument21 SeitenMechanization On Harvesting and Infied Collection of Oil PalmShamil Al Dafar100% (2)
- A Palm Oil Mill in Oyo StateDokument10 SeitenA Palm Oil Mill in Oyo StateindiamillersNoch keine Bewertungen
- Advantages & Disadvantages, Technology of Mechanisation in Oil Palm PlantationDokument15 SeitenAdvantages & Disadvantages, Technology of Mechanisation in Oil Palm PlantationFarhan Shabri100% (1)
- LPE 2501 SCL WORKSHEET 3 (Ans)Dokument1 SeiteLPE 2501 SCL WORKSHEET 3 (Ans)Aqilah SofianNoch keine Bewertungen
- Oil Palm CHP Aik ChinDokument35 SeitenOil Palm CHP Aik Chingsch13100% (2)
- Cash Flow Kelapa MRDDokument2 SeitenCash Flow Kelapa MRDfaeez1979Noch keine Bewertungen
- LPE 2501 SCL WORKSHEET 4 (Ans)Dokument2 SeitenLPE 2501 SCL WORKSHEET 4 (Ans)Aqilah SofianNoch keine Bewertungen
- Cash Flow Kelapa MATAGDokument1 SeiteCash Flow Kelapa MATAGtheatresonic100% (2)
- Written Test TJC501 (Exercise)Dokument2 SeitenWritten Test TJC501 (Exercise)Xerofear100% (1)
- Bleaching Earths: Optimizing Refining ThroughputDokument21 SeitenBleaching Earths: Optimizing Refining Throughputbadak100% (1)
- Mpob Oil PalmDokument14 SeitenMpob Oil PalmJoselyn ChewNoch keine Bewertungen
- UITM Mechanical ResearchDokument89 SeitenUITM Mechanical ResearchFauzan ZakariaNoch keine Bewertungen
- Acacia Pocketbook 1Dokument13 SeitenAcacia Pocketbook 1belbel4321Noch keine Bewertungen
- The Employment Act 1955Dokument4 SeitenThe Employment Act 1955Yusazrin WmsNoch keine Bewertungen
- Adaptasi KepitingDokument5 SeitenAdaptasi KepitingJipri NANoch keine Bewertungen
- Acacia MangiumDokument26 SeitenAcacia Mangiumthemfy100% (1)
- CCM Chemical Company's Strategic Growth PlanDokument37 SeitenCCM Chemical Company's Strategic Growth PlanMohammed Hammoudeh100% (2)
- Katalog RBT 2019 Ting. 1 & 2Dokument24 SeitenKatalog RBT 2019 Ting. 1 & 2ainmyns123Noch keine Bewertungen
- Nasi Kerabu, The Flavours of Kelantan and MalaysiaDokument7 SeitenNasi Kerabu, The Flavours of Kelantan and MalaysiaYi Teng SohNoch keine Bewertungen
- Malaysian Cuisine - What To Eat - CNN Travel PDFDokument9 SeitenMalaysian Cuisine - What To Eat - CNN Travel PDFvinothj86Noch keine Bewertungen
- Brachyuran CrabsDokument18 SeitenBrachyuran CrabsSathiya RajNoch keine Bewertungen
- Potential of Jatropha CurcasDokument35 SeitenPotential of Jatropha CurcassdcxzaqweNoch keine Bewertungen
- English Module BIG 50 (P1)Dokument116 SeitenEnglish Module BIG 50 (P1)Daniel KohNoch keine Bewertungen
- Soalan Bahasa Inggeris Tahun 3 Peperiksaan Pertengahan TahunDokument8 SeitenSoalan Bahasa Inggeris Tahun 3 Peperiksaan Pertengahan TahunIraahs Ram AnilramNoch keine Bewertungen
- 1507 HatcheryOperationsManual HolothuriaScabra Tarawa PDFDokument54 Seiten1507 HatcheryOperationsManual HolothuriaScabra Tarawa PDFDouglas CamposNoch keine Bewertungen
- Chili Fertigation Investment in MalaysiaDokument9 SeitenChili Fertigation Investment in MalaysiaSaifuddin SaidiNoch keine Bewertungen
- CamScanner Scans PDFs QuicklyDokument4 SeitenCamScanner Scans PDFs QuicklyPuvaNoch keine Bewertungen
- Isalmic EnterprenuershipDokument6 SeitenIsalmic EnterprenuershipMuhammad Umer Farooq AwanNoch keine Bewertungen
- Social Expression Upsr 2017Dokument5 SeitenSocial Expression Upsr 2017Ruku GovalNoch keine Bewertungen
- Crop Physiology (Agr 3301)Dokument8 SeitenCrop Physiology (Agr 3301)Julian ChristopherNoch keine Bewertungen
- Chapter 5 Size Reduction SVDokument60 SeitenChapter 5 Size Reduction SVnajwaNoch keine Bewertungen
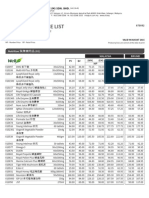
- CNI PricelistDokument8 SeitenCNI PricelisthairyzaltNoch keine Bewertungen
- Kertas Kerja Kolej KomunitiDokument5 SeitenKertas Kerja Kolej Komunitiipop_001Noch keine Bewertungen
- Black and White First Grade Spelling Bee Word List PDFDokument1 SeiteBlack and White First Grade Spelling Bee Word List PDFKim SagadalNoch keine Bewertungen
- Jadual Pasar Di PerlisDokument1 SeiteJadual Pasar Di PerlisAbdul Rahim OmarNoch keine Bewertungen
- Presentation Obm310 Event ManagementDokument22 SeitenPresentation Obm310 Event ManagementadekramlanNoch keine Bewertungen
- Penanaman CiliDokument30 SeitenPenanaman Cilinarayanasamy30Noch keine Bewertungen
- LECTURE 2 Tanaman Kelapa SawitDokument127 SeitenLECTURE 2 Tanaman Kelapa SawitZulhelmi MustafaNoch keine Bewertungen
- Shrimps CultureDokument24 SeitenShrimps CultureKath ReignNoch keine Bewertungen
- Quotation THDokument1 SeiteQuotation THDurgaa SaralanNoch keine Bewertungen
- Deia Paya PedaDokument62 SeitenDeia Paya Pedamuslim83Noch keine Bewertungen
- Poultry Growing Drinking Systems Big Dutchman enDokument8 SeitenPoultry Growing Drinking Systems Big Dutchman enHeshamKotb0% (1)
- History of Pulau Mawar Mersing, Johor PresentationDokument19 SeitenHistory of Pulau Mawar Mersing, Johor PresentationFendy RoynNoch keine Bewertungen
- Problem Sheet Agr244 - Muhammad Alif Bin Azizan - 2021469618Dokument3 SeitenProblem Sheet Agr244 - Muhammad Alif Bin Azizan - 2021469618szkipper 03100% (1)
- Biofloc System 15368566Dokument10 SeitenBiofloc System 15368566PoseidonNoch keine Bewertungen
- Clinical Microscopes Deliver Improved Contrast and ClarityDokument20 SeitenClinical Microscopes Deliver Improved Contrast and ClarityJorge Tellez OrduzNoch keine Bewertungen
- Paper 1 Year 4Dokument13 SeitenPaper 1 Year 4vijay raj100% (2)
- MOSTI RD Fund PDFDokument23 SeitenMOSTI RD Fund PDFMohammadkhairilanwar Ibn Jamaluddin AlhajNoch keine Bewertungen
- Pengiraan Penanaman Melon Fertigasi Titis Terbuka 1000 PokokDokument36 SeitenPengiraan Penanaman Melon Fertigasi Titis Terbuka 1000 PokokRiazu ZahrillNoch keine Bewertungen
- Irshad Ahmad Cife Sea Bass and Pomfret Culture .Dokument12 SeitenIrshad Ahmad Cife Sea Bass and Pomfret Culture .Irshad AhmadNoch keine Bewertungen
- Arrange, Order, Match English Words Sentences QuestionsDokument7 SeitenArrange, Order, Match English Words Sentences QuestionsCecilia Bte Ambrose LinsuaNoch keine Bewertungen
- Animal Science Project Topics and MaterialsDokument2 SeitenAnimal Science Project Topics and MaterialsProject ChampionzNoch keine Bewertungen
- Development and Performance Evaluation of Maize Threshing and Grinding MachineDokument6 SeitenDevelopment and Performance Evaluation of Maize Threshing and Grinding MachineAJER JOURNAL100% (1)
- 35 - Better Freshwater Fish-Farming PDFDokument72 Seiten35 - Better Freshwater Fish-Farming PDFSeyha L. AgriFoodNoch keine Bewertungen
- Rancangan Perniagaan RATDokument1 SeiteRancangan Perniagaan RATAdi Reza Abd RazakNoch keine Bewertungen
- Modification in The Design of An Already Existing Palm Nut - Fibre SeparatorDokument12 SeitenModification in The Design of An Already Existing Palm Nut - Fibre SeparatorBojan JanjicNoch keine Bewertungen
- Modification in The Design of An Already Existing Palm Nut - Fiber SeparationDokument12 SeitenModification in The Design of An Already Existing Palm Nut - Fiber SeparationNur OktaviaNoch keine Bewertungen
- Redesign and Fabrication of Coconut Dehusking MachineDokument52 SeitenRedesign and Fabrication of Coconut Dehusking MachineBassey Etim0% (1)
- Melon Dehusking MachineDokument17 SeitenMelon Dehusking MachinestphhaileyNoch keine Bewertungen
- INTRODUCTIONDokument5 SeitenINTRODUCTIONConrey BalmacedaNoch keine Bewertungen
- SCP - Letter Kaleem SBDokument21 SeitenSCP - Letter Kaleem SBfahadNoch keine Bewertungen
- Suguna Poultry Farm Company OverviewDokument53 SeitenSuguna Poultry Farm Company OverviewShreeSharmila MurugaPrabuNoch keine Bewertungen
- Oladokun Et Al-2019-Plant PathologyDokument8 SeitenOladokun Et Al-2019-Plant PathologyJim EspinosaNoch keine Bewertungen
- Agricultural Mechanization Initiative in Tanzania PDFDokument3 SeitenAgricultural Mechanization Initiative in Tanzania PDFavinashmunnuNoch keine Bewertungen
- Teresa OrchardDokument21 SeitenTeresa OrchardSteve Cris Sanchez100% (1)
- Current Issues On Agriculture in The PhilippinesDokument4 SeitenCurrent Issues On Agriculture in The PhilippinesErwin AgooNoch keine Bewertungen
- Value Chain Analysis of SesameDokument24 SeitenValue Chain Analysis of SesamekutoyaNoch keine Bewertungen
- How an Indian Village Achieved Harmony and ProgressDokument2 SeitenHow an Indian Village Achieved Harmony and ProgressSiva Krishna NeppaliNoch keine Bewertungen
- CDM Afforestation Project Restores Colombian WatershedDokument97 SeitenCDM Afforestation Project Restores Colombian WatershedErika AcevedoNoch keine Bewertungen
- List of FPOs in West BengalDokument3 SeitenList of FPOs in West BengalSandipNoch keine Bewertungen
- Lesson 7 Week 6 LO1 1.1 2ndDokument8 SeitenLesson 7 Week 6 LO1 1.1 2ndMariefe AwitNoch keine Bewertungen
- Evaluation of Growth and Yield Potential of Genotypes of Kerstings Groundnutmacrotyloma Geocarpum Harms in Northern GhanaDokument7 SeitenEvaluation of Growth and Yield Potential of Genotypes of Kerstings Groundnutmacrotyloma Geocarpum Harms in Northern GhanaOliver TalipNoch keine Bewertungen
- Battilani 2006Dokument8 SeitenBattilani 2006Gyanwa ManteNoch keine Bewertungen
- Skylo in FarmingDokument2 SeitenSkylo in FarmingIndrawan SuparanNoch keine Bewertungen
- Farming 2021Dokument8 SeitenFarming 2021fanwellNoch keine Bewertungen
- Introduction To AgribusinessDokument5 SeitenIntroduction To AgribusinessEufemia GumbanNoch keine Bewertungen
- Soil Types by Code and DescriptionDokument51 SeitenSoil Types by Code and Descriptionhaerul84Noch keine Bewertungen
- Muzaffarnagar GazetteerDokument391 SeitenMuzaffarnagar GazetteerImranMatanat100% (1)
- Melc Grade 9 and 10Dokument3 SeitenMelc Grade 9 and 10Angely A. FlorentinoNoch keine Bewertungen
- Natural Resource Governance: New Frontiers in Transparency and AccountabilityDokument69 SeitenNatural Resource Governance: New Frontiers in Transparency and Accountabilitymahdi sanaeiNoch keine Bewertungen
- History of Rubber in MalaysiaDokument7 SeitenHistory of Rubber in MalaysianazihahNoch keine Bewertungen
- Yin Min Tun MBFDokument75 SeitenYin Min Tun MBFhtethtethlaingNoch keine Bewertungen
- Thornton and Herrero 2013 Climate Change Adaptationin Mixed Crop-Livestock SystemsDokument9 SeitenThornton and Herrero 2013 Climate Change Adaptationin Mixed Crop-Livestock Systemsfargotty210026Noch keine Bewertungen
- Bougenville(Bunga KertasDokument3 SeitenBougenville(Bunga Kertassyahrul arul100% (2)
- Ornamental Hort Manual FinalDokument58 SeitenOrnamental Hort Manual FinalDR V S PATIL100% (1)
- Internship Report - Shakthi Sugars Limited (PDF - TXT)Dokument8 SeitenInternship Report - Shakthi Sugars Limited (PDF - TXT)MahantNoch keine Bewertungen
- 2016 Schenectady County Landslide ReportDokument11 Seiten2016 Schenectady County Landslide ReportAnonymous Pg7RtdU8uHNoch keine Bewertungen
- Memorandum No. 202-2019Dokument27 SeitenMemorandum No. 202-2019shellaNoch keine Bewertungen
- My Technoguide For Ampalaya Production Part 1Dokument39 SeitenMy Technoguide For Ampalaya Production Part 1haroldlacaba67% (3)