Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Egs 5905 Education and Teaching ProfessionDokument8 SeitenEgs 5905 Education and Teaching ProfessionKHAIRUNISANoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The Future Direction of TVETDokument18 SeitenThe Future Direction of TVETKHAIRUNISA100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
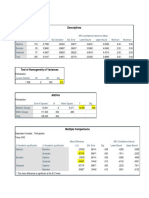
- .122 and Private Sector Is .128. Both VaDokument4 Seiten.122 and Private Sector Is .128. Both VaKHAIRUNISANoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Appendix: DescriptivesDokument3 SeitenAppendix: DescriptivesKHAIRUNISANoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Set Boundaries Between Your Work Life and Home LifeDokument2 SeitenSet Boundaries Between Your Work Life and Home LifeKHAIRUNISANoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Normal Distribution Test Results for Student Score DataDokument2 SeitenNormal Distribution Test Results for Student Score DataKHAIRUNISANoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Pemilihan Kerjaya Menurut Teori HollandDokument2 SeitenPemilihan Kerjaya Menurut Teori HollandKHAIRUNISANoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- QUESTION 2 Assignment 6 Chi SquareDokument2 SeitenQUESTION 2 Assignment 6 Chi SquareKHAIRUNISANoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- QUESTION 2 Assignment 9 RegressionDokument1 SeiteQUESTION 2 Assignment 9 RegressionKHAIRUNISANoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- Assessment and Evaluation in TVETDokument10 SeitenAssessment and Evaluation in TVETKHAIRUNISANoch keine Bewertungen
- Normal Distribution Test Results for Student Score DataDokument2 SeitenNormal Distribution Test Results for Student Score DataKHAIRUNISANoch keine Bewertungen
- Assessment in South KoreaDokument22 SeitenAssessment in South KoreaKHAIRUNISANoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Employer Engagement and Career Opportunities: Tve 5009 Cooperative EducationDokument6 SeitenEmployer Engagement and Career Opportunities: Tve 5009 Cooperative EducationKHAIRUNISANoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- StatistikDokument2 SeitenStatistikKHAIRUNISANoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Work Scope Service and ProjectDokument2 SeitenWork Scope Service and ProjectKHAIRUNISANoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Contemporary Designs For Curriculum Development: Tve 5002 Curriculum Design in Technical and Vocational EducationDokument20 SeitenContemporary Designs For Curriculum Development: Tve 5002 Curriculum Design in Technical and Vocational EducationKHAIRUNISANoch keine Bewertungen
- Mechanical Engineer Job DescriptionDokument2 SeitenMechanical Engineer Job DescriptionKHAIRUNISANoch keine Bewertungen
- Statistics For Social Science Using SPSSDokument5 SeitenStatistics For Social Science Using SPSSKHAIRUNISANoch keine Bewertungen
- Excel 2018 CalendarDokument12 SeitenExcel 2018 CalendarKHAIRUNISANoch keine Bewertungen
- Gas CalculationsDokument2 SeitenGas CalculationsKHAIRUNISANoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- ECR Tracking LogDokument2 SeitenECR Tracking LogKHAIRUNISANoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- SKOP Pertengahan Tahun 2014 - Matematik Tahun 6Dokument2 SeitenSKOP Pertengahan Tahun 2014 - Matematik Tahun 6KHAIRUNISANoch keine Bewertungen
- Fault Tree AnalysisDokument70 SeitenFault Tree Analysispankaj51281100% (1)
- Tagging - Cupboard & IndexDokument6 SeitenTagging - Cupboard & IndexKHAIRUNISANoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- BluescreenDokument1 SeiteBluescreenKHAIRUNISANoch keine Bewertungen
- Gas CalculationsDokument2 SeitenGas CalculationsKHAIRUNISANoch keine Bewertungen
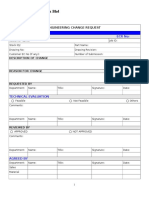
- Engineering Change Request FormDokument2 SeitenEngineering Change Request FormKHAIRUNISA100% (1)
- Test 2 MathsDokument12 SeitenTest 2 MathsKHAIRUNISANoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Training Need Assessment Format (Modification)Dokument1 SeiteTraining Need Assessment Format (Modification)KHAIRUNISANoch keine Bewertungen
- SKOP Pertengahan Tahun 2014 - Matematik Tahun 6Dokument2 SeitenSKOP Pertengahan Tahun 2014 - Matematik Tahun 6KHAIRUNISANoch keine Bewertungen
- Myths, Heroes and Progress in Mrs. Rania's Speaking ClassDokument26 SeitenMyths, Heroes and Progress in Mrs. Rania's Speaking ClassRania ChokorNoch keine Bewertungen
- (WWWDokument5 Seiten(WWWnosena1267Noch keine Bewertungen
- Ato v. Ramos CDDokument2 SeitenAto v. Ramos CDKaren AmpeloquioNoch keine Bewertungen
- GST Registration CertificateDokument3 SeitenGST Registration CertificateChujja ChuNoch keine Bewertungen
- Judge Jackson's Roger Stone RulingDokument56 SeitenJudge Jackson's Roger Stone RulingLaw&CrimeNoch keine Bewertungen
- AACC and Proactive Outreach Manager Integration - 03.04 - October 2020Dokument59 SeitenAACC and Proactive Outreach Manager Integration - 03.04 - October 2020Michael ANoch keine Bewertungen
- Supreme Court of India Yearly Digest 2015 (692 Judgments) - Indian Law DatabaseDokument15 SeitenSupreme Court of India Yearly Digest 2015 (692 Judgments) - Indian Law DatabaseAnushree KapadiaNoch keine Bewertungen
- Public Disorders: Art. 153 Revised Penal Code. Tumults and Other Disturbances of Public OrderDokument5 SeitenPublic Disorders: Art. 153 Revised Penal Code. Tumults and Other Disturbances of Public Orderjeysonmacaraig100% (2)
- Instant Download Foundations of Analog and Digital Electronic Circuits Issn PDF FREEDokument32 SeitenInstant Download Foundations of Analog and Digital Electronic Circuits Issn PDF FREEjoyce.parkman948100% (43)
- Sanchez Vs AsinganDokument1 SeiteSanchez Vs AsinganJanice100% (1)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Petron vs Calesa and OthersDokument9 SeitenPetron vs Calesa and Othersedawrd aroncianoNoch keine Bewertungen
- Far Eastern Bank (A Rural Bank) Inc. Annex A PDFDokument2 SeitenFar Eastern Bank (A Rural Bank) Inc. Annex A PDFIris OmerNoch keine Bewertungen
- Aaaa RTM DIAMOND PDFDokument49 SeitenAaaa RTM DIAMOND PDFMaphosa Nhlapo100% (4)
- Online Tax Payment PortalDokument1 SeiteOnline Tax Payment Portalashish rathoreNoch keine Bewertungen
- Evolving Principles of Dominant Position and Predatory Pricing in the Telecommunication Sector (1)Dokument20 SeitenEvolving Principles of Dominant Position and Predatory Pricing in the Telecommunication Sector (1)Aryansh SharmaNoch keine Bewertungen
- Business Plug-In B6 Information Security: Learning OutcomesDokument7 SeitenBusiness Plug-In B6 Information Security: Learning OutcomesThao TrungNoch keine Bewertungen
- Bacolod, Lanao Del NorteDokument2 SeitenBacolod, Lanao Del NorteSunStar Philippine NewsNoch keine Bewertungen
- Lucky Chops - CocoDokument6 SeitenLucky Chops - CocoLe Poulet De KFCNoch keine Bewertungen
- Significance of Wearing of Complete UniformDokument13 SeitenSignificance of Wearing of Complete Uniformcherry mae rosaliaNoch keine Bewertungen
- DV Consulting Inc Summary of ServicesDokument5 SeitenDV Consulting Inc Summary of ServicesDv AccountingNoch keine Bewertungen
- Theories of Crime Causation 1 PDFDokument28 SeitenTheories of Crime Causation 1 PDFJeanilyn Palma100% (1)
- Financial Statements of Not-for-Profit Organisations: Meaning of Key Terms Used in The ChapterDokument202 SeitenFinancial Statements of Not-for-Profit Organisations: Meaning of Key Terms Used in The ChapterVISHNUKUMAR S VNoch keine Bewertungen
- Bagatsing V RamirezDokument3 SeitenBagatsing V RamirezAnonymous iOYkz0wNoch keine Bewertungen
- Authum Infra - PPTDokument191 SeitenAuthum Infra - PPTmisfitmedicoNoch keine Bewertungen
- Appointment ConfirmationDokument5 SeitenAppointment Confirmationrafi.ortega.perezNoch keine Bewertungen
- Akun-Akun Queen ToysDokument4 SeitenAkun-Akun Queen ToysAnggita Kharisma MaharaniNoch keine Bewertungen
- Respondent.: (G.R. No. 227482. July 1, 2019.)Dokument2 SeitenRespondent.: (G.R. No. 227482. July 1, 2019.)mei atienza100% (1)
- Guide To Plan Management PDFDokument20 SeitenGuide To Plan Management PDFArrigo Lupori100% (1)
- Civil Appeal 14 of 2015Dokument21 SeitenCivil Appeal 14 of 2015JamesNoch keine Bewertungen
- NBIMS-US V3 2.4.4.7 OmniClass Table 31 PhasesDokument8 SeitenNBIMS-US V3 2.4.4.7 OmniClass Table 31 Phasesmahmoud mokhtarNoch keine Bewertungen
- Crazy for the Storm: A Memoir of SurvivalVon EverandCrazy for the Storm: A Memoir of SurvivalBewertung: 3.5 von 5 Sternen3.5/5 (217)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessVon EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessBewertung: 4 von 5 Sternen4/5 (6)
- The Last Dive: A Father and Son's Fatal Descent into the Ocean's DepthsVon EverandThe Last Dive: A Father and Son's Fatal Descent into the Ocean's DepthsNoch keine Bewertungen
- The Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceVon EverandThe Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceBewertung: 4.5 von 5 Sternen4.5/5 (23)
- Summary and Interpretation of Reality TransurfingVon EverandSummary and Interpretation of Reality TransurfingBewertung: 5 von 5 Sternen5/5 (5)
- A Brief History of Time: From the Big Bang to Black HolesVon EverandA Brief History of Time: From the Big Bang to Black HolesBewertung: 4 von 5 Sternen4/5 (2193)