Das könnte Ihnen auch gefallen
- Rules of InferenceDokument1 SeiteRules of InferencePrakash JoshiNoch keine Bewertungen
- Agile PracticeDokument557 SeitenAgile PracticePrakash JoshiNoch keine Bewertungen
- Java Interview Coding Tasks-SampleDokument19 SeitenJava Interview Coding Tasks-SamplePrakash Joshi100% (2)
- NodeXL Tutorial BenS v2Dokument22 SeitenNodeXL Tutorial BenS v2Prakash JoshiNoch keine Bewertungen
- MapReduce: Simplified Data Processing On Large ClustersDokument13 SeitenMapReduce: Simplified Data Processing On Large Clusterszzztimbo100% (1)
- Induction Problems PracticeDokument13 SeitenInduction Problems PracticePrakash JoshiNoch keine Bewertungen
- Harry H Porter III Theory of Computation Chapter 1aDokument79 SeitenHarry H Porter III Theory of Computation Chapter 1aPrakash JoshiNoch keine Bewertungen
- MATH 4101 SyllabusDokument5 SeitenMATH 4101 SyllabusPrakash JoshiNoch keine Bewertungen
- MATH 4101 SyllabusDokument5 SeitenMATH 4101 SyllabusPrakash JoshiNoch keine Bewertungen
- Are You Kidding Me? No I Am Not HahaDokument1 SeiteAre You Kidding Me? No I Am Not HahaPrakash JoshiNoch keine Bewertungen
- Nill, Ashley - The History of AspartameDokument53 SeitenNill, Ashley - The History of AspartamePrakash JoshiNoch keine Bewertungen
- Good BookDokument1 SeiteGood BookPrakash JoshiNoch keine Bewertungen
- Kura SahiDokument3 SeitenKura SahiPrakash JoshiNoch keine Bewertungen
- Are You Kidding Me? No I Am Not HahaDokument1 SeiteAre You Kidding Me? No I Am Not HahaPrakash JoshiNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 06 Numerical Differentiation IntegrationDokument50 Seiten06 Numerical Differentiation IntegrationArlene F. MontalboNoch keine Bewertungen
- On Stress Measures in Deformed Solids: by Nasser M. AbbasiDokument57 SeitenOn Stress Measures in Deformed Solids: by Nasser M. AbbasircmmrcNoch keine Bewertungen
- BK Chap07Dokument78 SeitenBK Chap07Osama_Othman010% (1)
- Module 2: Special Products and Binomial Theorem: ObjectivesDokument4 SeitenModule 2: Special Products and Binomial Theorem: ObjectivesmoreNoch keine Bewertungen
- Math ChronologyDokument18 SeitenMath ChronologyRina Andrade Manticlap LptNoch keine Bewertungen
- Problem SolveDokument28 SeitenProblem SolveMAHFUZUR RAHMAN SADINoch keine Bewertungen
- Exponents DrillDokument31 SeitenExponents DrillAhmad WaseemNoch keine Bewertungen
- UJIAN CLO 1 - SISTEM PERSAMAAN LINEAR - Attempt ReviewDokument7 SeitenUJIAN CLO 1 - SISTEM PERSAMAAN LINEAR - Attempt ReviewAkbar PalekoriNoch keine Bewertungen
- 2014 TF JamesKraft Intro To NumberTheory PDFDokument2 Seiten2014 TF JamesKraft Intro To NumberTheory PDFDannyNoch keine Bewertungen
- Engineering Mathematics Syllabus BreakdownDokument3 SeitenEngineering Mathematics Syllabus BreakdowngopichandallakaNoch keine Bewertungen
- Exact SequensesDokument7 SeitenExact SequensesTHÚY LÊNoch keine Bewertungen
- FEM NDTruong (Eng)Dokument59 SeitenFEM NDTruong (Eng)Ngọc VănNoch keine Bewertungen
- WMA11 01 Rms 20200305 (13573) PDFDokument26 SeitenWMA11 01 Rms 20200305 (13573) PDFAhmad BatranNoch keine Bewertungen
- Grade 8 Maths HMDokument19 SeitenGrade 8 Maths HMRiya PatelNoch keine Bewertungen
- Geometry Textbook Chapter 3-4Dokument148 SeitenGeometry Textbook Chapter 3-4anurag sahayNoch keine Bewertungen
- 04 - Equations and Multiple-Angle Identities PDFDokument4 Seiten04 - Equations and Multiple-Angle Identities PDFMark Abion ValladolidNoch keine Bewertungen
- Cedram: Éric Gourgoulhon and Marco ManciniDokument58 SeitenCedram: Éric Gourgoulhon and Marco ManciniM Sohaib M HanifNoch keine Bewertungen
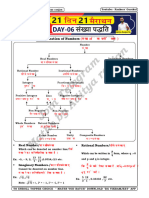
- DAY 06 Number System-01 (21 Days 21 Marathon)Dokument5 SeitenDAY 06 Number System-01 (21 Days 21 Marathon)Janaksinh ZalaNoch keine Bewertungen
- Math - Mark Final 7Dokument7 SeitenMath - Mark Final 7Chris TianNoch keine Bewertungen
- Class 9 Math Notes on Matrices, Determinants, Real and Complex NumbersDokument5 SeitenClass 9 Math Notes on Matrices, Determinants, Real and Complex NumbersHabib Ullah100% (1)
- Chapt 02 Lect06Dokument7 SeitenChapt 02 Lect06Shanmukha SundaramNoch keine Bewertungen
- 4 Legendre Functions: 4.1 Series SolutionDokument12 Seiten4 Legendre Functions: 4.1 Series SolutionRoy VeseyNoch keine Bewertungen
- Linear Equations GuideDokument3 SeitenLinear Equations GuideFarhad HossainNoch keine Bewertungen
- NCERT Solutions For Class 11 Maths Chapter 8 Binomial Theorem Exercise 8.1Dokument6 SeitenNCERT Solutions For Class 11 Maths Chapter 8 Binomial Theorem Exercise 8.1Daksh DarjiNoch keine Bewertungen
- LInear Equations One Variable Examples & SolutionsDokument11 SeitenLInear Equations One Variable Examples & Solutionsliesly buticNoch keine Bewertungen
- Vectors Eq Line PlaneDokument11 SeitenVectors Eq Line PlaneMartin DelgadoNoch keine Bewertungen
- BV Cvxbook Extra ExercisesDokument237 SeitenBV Cvxbook Extra ExercisesWilian GuamánNoch keine Bewertungen
- 08 Oriented Element SetsDokument9 Seiten08 Oriented Element SetsaunbhuttaNoch keine Bewertungen
- N. Bourbaki - Topological Vector Spaces - Chapters 1-5 (1987, Springer)Dokument371 SeitenN. Bourbaki - Topological Vector Spaces - Chapters 1-5 (1987, Springer)Andres FelipeNoch keine Bewertungen
- Solving Polynomial EquationsDokument11 SeitenSolving Polynomial Equationsashishsingh007Noch keine Bewertungen