Das könnte Ihnen auch gefallen
- Digital Modulations using MatlabVon EverandDigital Modulations using MatlabBewertung: 4 von 5 Sternen4/5 (6)
- Cobas c111 Interface ManualDokument80 SeitenCobas c111 Interface ManualJohnny TelloNoch keine Bewertungen
- BSC Se Group02-1Dokument9 SeitenBSC Se Group02-1Eric MboyaNoch keine Bewertungen
- Introduction To Spread Spectrum CommunicationsDokument20 SeitenIntroduction To Spread Spectrum CommunicationsSriramNoch keine Bewertungen
- Ref: Data and Computer Communications, William StallingDokument14 SeitenRef: Data and Computer Communications, William StallingSwet SheershNoch keine Bewertungen
- DC-Module2 - NotesDokument35 SeitenDC-Module2 - Notescobad87435Noch keine Bewertungen
- Line CodingDokument19 SeitenLine CodingRajesh Nandalike0% (1)
- 1.4 KNR2103 - Week 9 - Day 1 - PDF PDFDokument21 Seiten1.4 KNR2103 - Week 9 - Day 1 - PDF PDFسلمان اوڠNoch keine Bewertungen
- 1.4 KNR2103 - Week 9 - Day 1 - PDF PDFDokument21 Seiten1.4 KNR2103 - Week 9 - Day 1 - PDF PDFسلمان اوڠNoch keine Bewertungen
- Differential Manchester Encoding - Wikipedia, The Free EncyclopediaDokument2 SeitenDifferential Manchester Encoding - Wikipedia, The Free EncyclopediaMelvin BaldwinNoch keine Bewertungen
- Simulation of Digital Modulation TechniquesDokument67 SeitenSimulation of Digital Modulation TechniquesEkta KumariNoch keine Bewertungen
- Answers To NetworkingDokument6 SeitenAnswers To Networkingmohamed turayNoch keine Bewertungen
- Digital ModulationDokument9 SeitenDigital ModulationAdel AdelNoch keine Bewertungen
- Tutorial Sheet 4Dokument7 SeitenTutorial Sheet 4sibti007Noch keine Bewertungen
- Assignment 1 (DCN)Dokument15 SeitenAssignment 1 (DCN)deepak KamatchiNoch keine Bewertungen
- 3.physical Layer (Contd) - Data EncodingDokument6 Seiten3.physical Layer (Contd) - Data Encodingde veronNoch keine Bewertungen
- Clemency Assignment 3Dokument4 SeitenClemency Assignment 3Clemency Chifundo NjobvuNoch keine Bewertungen
- Code Division Multiple AccessDokument8 SeitenCode Division Multiple AccessDwarak ChaluvadiNoch keine Bewertungen
- Pre Lab - 2: ObjectiveDokument6 SeitenPre Lab - 2: ObjectivemythriNoch keine Bewertungen
- Lesson 2 - 2 - Digital TransmissionDokument90 SeitenLesson 2 - 2 - Digital TransmissionCheezeNoch keine Bewertungen
- Data Com HW4 MaykieDokument3 SeitenData Com HW4 MaykieMaykie W.A.100% (1)
- CNS-ST3.1Dokument17 SeitenCNS-ST3.1Achilles AldaveNoch keine Bewertungen
- CDMA TechnologyDokument20 SeitenCDMA Technologyshams_junakiyaNoch keine Bewertungen
- Implementation and Bit Error Rate Analysis of BPSK Modulation and Demodulation Technique Using MatlabDokument5 SeitenImplementation and Bit Error Rate Analysis of BPSK Modulation and Demodulation Technique Using MatlabHayatun NufusNoch keine Bewertungen
- Commsim 2001 Tutorial Simulation of Communication Systems: TransmitterDokument21 SeitenCommsim 2001 Tutorial Simulation of Communication Systems: TransmitterDonatas Pelenis100% (1)
- Wk3 - LineCoding - v2Dokument50 SeitenWk3 - LineCoding - v2Taqris BahariNoch keine Bewertungen
- GBC 002 E0 0 GSM Radio Technology-33Dokument33 SeitenGBC 002 E0 0 GSM Radio Technology-33Muad YassinNoch keine Bewertungen
- Digital Encoding Techniques: TCC E&I 1Dokument69 SeitenDigital Encoding Techniques: TCC E&I 1Daniel SuterNoch keine Bewertungen
- Carrier Modulation: Version 2 ECE IIT, KharagpurDokument6 SeitenCarrier Modulation: Version 2 ECE IIT, KharagpurRupaShawNoch keine Bewertungen
- MTDCC103 ModelAnswerDokument8 SeitenMTDCC103 ModelAnswerNoman Ali35Noch keine Bewertungen
- CN Unit-1 PPTDokument230 SeitenCN Unit-1 PPTFjjdjrj djrjfjNoch keine Bewertungen
- Data Communication CSE 225/233: Week-4, Lesson-2 Digital TransmissionDokument18 SeitenData Communication CSE 225/233: Week-4, Lesson-2 Digital TransmissionTanvir HasanNoch keine Bewertungen
- Activity No. 3 Pulse Code Modulation: Perez, Patricia Grace P. Student Number: 201912327 Bscpe 3-1 Cpen 80Dokument5 SeitenActivity No. 3 Pulse Code Modulation: Perez, Patricia Grace P. Student Number: 201912327 Bscpe 3-1 Cpen 80Patricia Grace PerezNoch keine Bewertungen
- Experiment 4 Objective:: Apparatus Required: Name of Equipment SpecificationDokument4 SeitenExperiment 4 Objective:: Apparatus Required: Name of Equipment SpecificationMonika KhatriNoch keine Bewertungen
- BSNL AnswersDokument10 SeitenBSNL Answerssuyog nikamNoch keine Bewertungen
- Chapter 8Dokument67 SeitenChapter 8Parameswaran SolayappanNoch keine Bewertungen
- Cpe400L 09 Experiment 9Dokument25 SeitenCpe400L 09 Experiment 9KirubaKaran SNoch keine Bewertungen
- Starz University: Presentation: Switching Engineering in Comma Widimongar W. Jarque Id: 2774Dokument9 SeitenStarz University: Presentation: Switching Engineering in Comma Widimongar W. Jarque Id: 2774Widimongar W. JarqueNoch keine Bewertungen
- VLSI Architecture of FM0/Manchester Encoding Using SOLS Technique For Wireless Sensor NetworkDokument7 SeitenVLSI Architecture of FM0/Manchester Encoding Using SOLS Technique For Wireless Sensor NetworkDon RajuNoch keine Bewertungen
- Digital ModulationDokument48 SeitenDigital ModulationMohamed EssamNoch keine Bewertungen
- Module 4 Introduction To Physical LayerDokument18 SeitenModule 4 Introduction To Physical LayerMc John PobleteNoch keine Bewertungen
- HP-AN387 - High Productivity Measurements in Digital, TransmissionDokument44 SeitenHP-AN387 - High Productivity Measurements in Digital, Transmissionsirjole75840% (1)
- Chapter 2 Data Encoding TechniquesDokument63 SeitenChapter 2 Data Encoding TechniquesAron AbrahaNoch keine Bewertungen
- Project Report On Performance of Digital Modulation TechniquesDokument8 SeitenProject Report On Performance of Digital Modulation Techniqueseshet chafNoch keine Bewertungen
- Data Comm & Networking I Its Evening: Physical Layer . Sub-TopicsDokument9 SeitenData Comm & Networking I Its Evening: Physical Layer . Sub-TopicssemakulaNoch keine Bewertungen
- Computer Networks Practical FileDokument15 SeitenComputer Networks Practical FilebikkerNoch keine Bewertungen
- Digital TransmissionDokument63 SeitenDigital TransmissionVanessa KhalidNoch keine Bewertungen
- Digital CommunicationDokument2 SeitenDigital CommunicationHarshal SonarNoch keine Bewertungen
- Adcl-01 EXP V1.1Dokument12 SeitenAdcl-01 EXP V1.1tom_116Noch keine Bewertungen
- DC Lab VivaDokument5 SeitenDC Lab VivaAbir HoqueNoch keine Bewertungen
- Telemetry Assignment: Submitted By: Singh Kushagra Harilal Ei-H 0909732109Dokument47 SeitenTelemetry Assignment: Submitted By: Singh Kushagra Harilal Ei-H 0909732109Shashank SrivastavaNoch keine Bewertungen
- 02.1 Review QuestionsDokument2 Seiten02.1 Review Questionsreagan oloyaNoch keine Bewertungen
- Chapter 4 - Data Link LayerDokument60 SeitenChapter 4 - Data Link LayerTanveer Ahmed HakroNoch keine Bewertungen
- Implementation and Bit Error Rate Analysis of BPSK Modulation and Demodulation Technique Using MATLABDokument5 SeitenImplementation and Bit Error Rate Analysis of BPSK Modulation and Demodulation Technique Using MATLABseventhsensegroupNoch keine Bewertungen
- T1 FundamentalsDokument101 SeitenT1 FundamentalsMunir WalyaniNoch keine Bewertungen
- 01-Basis of Data Communication TechnologyDokument47 Seiten01-Basis of Data Communication TechnologygzagpoonNoch keine Bewertungen
- Line Coding Techniques 2023Dokument31 SeitenLine Coding Techniques 2023Gerald KapinguraNoch keine Bewertungen
- 2103 & 2104 (WL)Dokument48 Seiten2103 & 2104 (WL)bhoopsharmaNoch keine Bewertungen
- Computer Networks (CS425) : Data EncodingDokument7 SeitenComputer Networks (CS425) : Data EncodingAnish VeettiyankalNoch keine Bewertungen
- Signal Integrity: From High-Speed to Radiofrequency ApplicationsVon EverandSignal Integrity: From High-Speed to Radiofrequency ApplicationsNoch keine Bewertungen
- Digital Signal Processing: Instant AccessVon EverandDigital Signal Processing: Instant AccessBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Tn1211 SW Drivers n25qDokument10 SeitenTn1211 SW Drivers n25qbviswanath84Noch keine Bewertungen
- Atmel 9164 Manchester Coding Basics Application NoteDokument24 SeitenAtmel 9164 Manchester Coding Basics Application Notebviswanath84Noch keine Bewertungen
- Verilog Interview Questions4Dokument23 SeitenVerilog Interview Questions4Rohith Raj100% (1)
- Fifo DesignDokument43 SeitenFifo Designbviswanath84Noch keine Bewertungen
- High-Speed and Low-Power Multipliers Using The Baugh-Wooley Algorithm and HPM Reduction TreeDokument4 SeitenHigh-Speed and Low-Power Multipliers Using The Baugh-Wooley Algorithm and HPM Reduction Treebviswanath84Noch keine Bewertungen
- Appium Interview Questions Easy & New Updates On MayDokument8 SeitenAppium Interview Questions Easy & New Updates On Mayjeffa123Noch keine Bewertungen
- Cobol Programming ManualDokument58 SeitenCobol Programming Manualalex_osNoch keine Bewertungen
- Catalog Anytone 2023 ENGDokument32 SeitenCatalog Anytone 2023 ENGnenadbjelicNoch keine Bewertungen
- m10 HandbookDokument593 Seitenm10 HandbookHChNoch keine Bewertungen
- Ah5f GaDokument2 SeitenAh5f GaNelson P. ColoNoch keine Bewertungen
- Chroma Brochure 8000Dokument12 SeitenChroma Brochure 8000Michel RigaudNoch keine Bewertungen
- Cisco SD-WAN Extranet VPN LabDokument24 SeitenCisco SD-WAN Extranet VPN LabShashank TripathiNoch keine Bewertungen
- Final Exam Semester 1Dokument21 SeitenFinal Exam Semester 1Moh Nur AlifaniNoch keine Bewertungen
- ELECS1 Module 1 Introduction and HistoryDokument20 SeitenELECS1 Module 1 Introduction and HistoryJuan Miguel VillarroelNoch keine Bewertungen
- Chip Insider June 2011Dokument52 SeitenChip Insider June 2011Trisa KaapoorNoch keine Bewertungen
- B RRM White Paper Chapter 0111Dokument4 SeitenB RRM White Paper Chapter 0111Amarsaikhan AmgalanNoch keine Bewertungen
- Mod 6Dokument9 SeitenMod 6Tamer Ahmed El-KhawasNoch keine Bewertungen
- V + V P /V: SolutionDokument12 SeitenV + V P /V: SolutionNani Chori ShresthaNoch keine Bewertungen
- Symantec Backup Exe Admin GuideDokument1.342 SeitenSymantec Backup Exe Admin GuidedibpalNoch keine Bewertungen
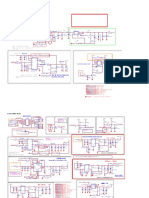
- 715G8709+SSB+ +u708 - U701 Sy8366qnc - U707 Sy8089a - U706 Sy8368q - U705 RT8079ZQ - U710 G5725adj - U702 G5719T - U709 G5725adj - U704 G9661Dokument2 Seiten715G8709+SSB+ +u708 - U701 Sy8366qnc - U707 Sy8089a - U706 Sy8368q - U705 RT8079ZQ - U710 G5725adj - U702 G5719T - U709 G5725adj - U704 G9661Jefferson LeiteNoch keine Bewertungen
- SF-104474-CD-20 Onload User GuideDokument265 SeitenSF-104474-CD-20 Onload User GuideTerryNoch keine Bewertungen
- Broadcast Equipment Radio EditedDokument35 SeitenBroadcast Equipment Radio EditedMBURU MARTIN KARIUKINoch keine Bewertungen
- SKU-GTC-Manual-42004-659L2F (701-902)Dokument16 SeitenSKU-GTC-Manual-42004-659L2F (701-902)Abhishek MasihNoch keine Bewertungen
- Reference Guide: Block DiagramDokument60 SeitenReference Guide: Block DiagrambestalfiraNoch keine Bewertungen
- ABB ICS Cyber Security Reference Architecture - Drawings - PublicDokument10 SeitenABB ICS Cyber Security Reference Architecture - Drawings - Publicximiti8472Noch keine Bewertungen
- DB Eletronica KE 20 R 2.3.2Dokument70 SeitenDB Eletronica KE 20 R 2.3.2carlosNoch keine Bewertungen
- Fortinet Exam PracticeDokument18 SeitenFortinet Exam PracticeRochelle-Mari van rooyenNoch keine Bewertungen
- CH 1Dokument62 SeitenCH 1waqarsyedwaqar76Noch keine Bewertungen
- SaP EWMDokument2 SeitenSaP EWMRohit ThakurNoch keine Bewertungen
- Usb-Mpi+ V4.0Dokument11 SeitenUsb-Mpi+ V4.0nguyentruongdhcnNoch keine Bewertungen
- HCS12 Assembly ProgrammingDokument24 SeitenHCS12 Assembly ProgrammingAfzaal Ashraf KhiladiNoch keine Bewertungen
- Motors - Stepper, BLDC, DCRDokument46 SeitenMotors - Stepper, BLDC, DCRSaurabh Shukla100% (1)
- Errata At90s2313Dokument2 SeitenErrata At90s2313carlos augusto do carmo braiaNoch keine Bewertungen
- 530AOD01 DS en PDFDokument4 Seiten530AOD01 DS en PDFHatem LaadhariNoch keine Bewertungen