Das könnte Ihnen auch gefallen
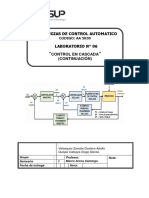
- Laboratorio 6 Estrategias de Control AutomaticoDokument10 SeitenLaboratorio 6 Estrategias de Control AutomaticoTeynakerNoch keine Bewertungen
- Curso de Instrumentos y Sistemas de Control - Clase 2Dokument26 SeitenCurso de Instrumentos y Sistemas de Control - Clase 2Richard FloresNoch keine Bewertungen
- Sistemas de Control y Variacion de PotenciaDokument58 SeitenSistemas de Control y Variacion de PotenciaReneMartinezGutierrezNoch keine Bewertungen
- 4 ConAdaDirDokument51 Seiten4 ConAdaDirGuillermo Crothers StevensNoch keine Bewertungen
- T4A-Termodinamica (Parte2)Dokument32 SeitenT4A-Termodinamica (Parte2)FlorianPonceNoch keine Bewertungen
- PLC IntermedioDokument70 SeitenPLC IntermedioMandrake26Noch keine Bewertungen
- Lab 07 - Conversión ADCDokument10 SeitenLab 07 - Conversión ADCDilman Alberto Ccotahuana HuarcaNoch keine Bewertungen
- Dimensionamiento de Conductores v1.1Dokument11 SeitenDimensionamiento de Conductores v1.1Lucho100% (1)
- 01 MotivacionDokument65 Seiten01 MotivacionJorge FajardoNoch keine Bewertungen
- T-11 Tomar Imágenes Téricas A Equipos Electromecánicos (1) (1) (Reparado)Dokument14 SeitenT-11 Tomar Imágenes Téricas A Equipos Electromecánicos (1) (1) (Reparado)Michael Ortega VillanuevaNoch keine Bewertungen
- Dimensionado de Líneas de Media TensiónDokument27 SeitenDimensionado de Líneas de Media TensiónCesar FernandezNoch keine Bewertungen
- Copia de Trabajo Individual N1Dokument5 SeitenCopia de Trabajo Individual N1rodrigo.solorzanoNoch keine Bewertungen
- Informe 9Dokument12 SeitenInforme 9AlwinNoch keine Bewertungen
- Control On-OfDokument11 SeitenControl On-OfClau Ri CaNoch keine Bewertungen
- LAB 07 - Electrónica de PotenciaDokument23 SeitenLAB 07 - Electrónica de PotenciaChristian FernandoNoch keine Bewertungen
- 02-Calculo de Xl-Bc-LAT-UTNDokument104 Seiten02-Calculo de Xl-Bc-LAT-UTNAndresNoch keine Bewertungen
- Mecanica Clasica Unidad 3Dokument53 SeitenMecanica Clasica Unidad 3Cristhian Felipe Suarez MoreaNoch keine Bewertungen
- Lab8 PLCDokument18 SeitenLab8 PLCDavid MontescoNoch keine Bewertungen
- Cursmo Mec ClasicaDokument159 SeitenCursmo Mec ClasicaCamilo PerezNoch keine Bewertungen
- Test Final - RED 5Dokument1 SeiteTest Final - RED 5david cruzNoch keine Bewertungen
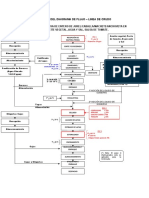
- Descripcion Del Diagrama de FlujoDokument2 SeitenDescripcion Del Diagrama de FlujoCristhian CortezNoch keine Bewertungen
- Reporte LAB12Dokument5 SeitenReporte LAB12Scryd AleysterNoch keine Bewertungen
- Efecto de Los Armónicos en TransformadoresDokument22 SeitenEfecto de Los Armónicos en TransformadoresHenry GarcesNoch keine Bewertungen
- Guía Laboratorio - Automatización IndustrialDokument4 SeitenGuía Laboratorio - Automatización IndustrialHamilton PoincareNoch keine Bewertungen
- 4 Dispositivos IntegradosDokument23 Seiten4 Dispositivos Integradoscchristt2584Noch keine Bewertungen
- Laboratorio 11 de "ELECTROMAGNETISMO"Dokument8 SeitenLaboratorio 11 de "ELECTROMAGNETISMO"abrahamtecsupNoch keine Bewertungen
- Tarea 02 - OK PDFDokument20 SeitenTarea 02 - OK PDFMafer Mendes SilveraNoch keine Bewertungen
- Segunda Prueba Instrumentacion Avanzada M.SaireDokument3 SeitenSegunda Prueba Instrumentacion Avanzada M.SaireMauro Abssalon Saire VallejosNoch keine Bewertungen
- Cómo Funciona El ReconectadorDokument5 SeitenCómo Funciona El ReconectadorWalter CañazacaNoch keine Bewertungen
- Mecanica Clasica Unidad 4Dokument47 SeitenMecanica Clasica Unidad 4Cristhian Felipe Suarez MoreaNoch keine Bewertungen
- Exa3 Lab12 Final PDFDokument9 SeitenExa3 Lab12 Final PDFJorge Enrique Laos PintoNoch keine Bewertungen
- Tarea Evaluativa N°3 - UBB PDFDokument1 SeiteTarea Evaluativa N°3 - UBB PDFMomo Nyuu De MuñozNoch keine Bewertungen
- 3 RegMinVarDokument46 Seiten3 RegMinVarGuillermo Crothers StevensNoch keine Bewertungen
- Tema 02Dokument46 SeitenTema 02andres limaNoch keine Bewertungen
- 08 - 0181 - ME Diseño de Control Automatizado para Caldera Pirotubular y Scada Implementado A Traves de LabviewDokument185 Seiten08 - 0181 - ME Diseño de Control Automatizado para Caldera Pirotubular y Scada Implementado A Traves de Labviewsalmo83:18Noch keine Bewertungen
- Capacitacion d1Dokument96 SeitenCapacitacion d1Elvis ErikNoch keine Bewertungen
- Laboratorio N6 Falta CHIPANADokument26 SeitenLaboratorio N6 Falta CHIPANAAlonso CMNoch keine Bewertungen
- Pid Con Retardo de TransporteDokument36 SeitenPid Con Retardo de TransporteRichardNoch keine Bewertungen
- L02 ModBus 2017Dokument26 SeitenL02 ModBus 2017Silver LeoNoch keine Bewertungen
- Lab 02 ModBus 2018Dokument23 SeitenLab 02 ModBus 2018Joelcito Pillco AlarconNoch keine Bewertungen
- 4 Cálculos Centro de TransformacónDokument14 Seiten4 Cálculos Centro de TransformacónLucas VillagránNoch keine Bewertungen
- 1 IntroduccionDokument38 Seiten1 IntroduccionGuillermo Crothers StevensNoch keine Bewertungen
- Practica 2 Teoria de Control AutomaticoDokument4 SeitenPractica 2 Teoria de Control AutomaticoChristian Choquehuanca PacoriNoch keine Bewertungen
- Pentesting en Entornos ControladosDokument56 SeitenPentesting en Entornos ControladosSony EscriNoch keine Bewertungen
- Control On - OffDokument5 SeitenControl On - OffMauricio ARNoch keine Bewertungen
- Control Continuo Con PLCDokument6 SeitenControl Continuo Con PLCCesar Marron MattaNoch keine Bewertungen
- Estrategias de ControlDokument25 SeitenEstrategias de ControlEdwin Ancota AcoticonaNoch keine Bewertungen
- Informe Delta VDokument7 SeitenInforme Delta VAlvaro Vargas GonzalesNoch keine Bewertungen
- Tesis Sobre Sentron Pac 3200Dokument107 SeitenTesis Sobre Sentron Pac 3200Arturo MartinezNoch keine Bewertungen
- Lab01 Caracteristicas de Las VálvulasDokument15 SeitenLab01 Caracteristicas de Las VálvulasRaphael Aguilar YarangaNoch keine Bewertungen
- 0238 Instalaciones DomóticasDokument6 Seiten0238 Instalaciones DomóticasRaul Sanchez RoyNoch keine Bewertungen
- Estudio de Caso Operativo - EntregarDokument3 SeitenEstudio de Caso Operativo - EntregarAbat SalasNoch keine Bewertungen
- Electrotecnia de Corriente AlternaDokument56 SeitenElectrotecnia de Corriente AlternaJuan Francisco Olarte PazNoch keine Bewertungen
- Generador de Corriente Continua 50%Dokument13 SeitenGenerador de Corriente Continua 50%Jann LeónNoch keine Bewertungen
- Lazos de Control de ProcesosDokument4 SeitenLazos de Control de Procesosluis pretellNoch keine Bewertungen
- Lab 13 Control Ramp Soak C5 BDokument23 SeitenLab 13 Control Ramp Soak C5 BSergio Marcos Bustinza GutierrezNoch keine Bewertungen
- Proyecto FinalDokument5 SeitenProyecto FinalDiego FloresNoch keine Bewertungen
- Control AnticipatorioDokument4 SeitenControl Anticipatorioiran josue100% (2)
- Lazos de Control de Proceso-CompletoDokument25 SeitenLazos de Control de Proceso-CompletoEthel Andrea Morán ZapataNoch keine Bewertungen
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Von EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Noch keine Bewertungen
- Manual de Usuario Incubadora A3186.Dokument79 SeitenManual de Usuario Incubadora A3186.travieso112Noch keine Bewertungen
- Manual Estudiante Moodle para TVDokument22 SeitenManual Estudiante Moodle para TVtravieso112Noch keine Bewertungen
- Manual de Uso Monitor de Paciente COMEN STAR8000Dokument231 SeitenManual de Uso Monitor de Paciente COMEN STAR8000travieso112100% (1)
- LigasureDokument72 SeitenLigasuretravieso112Noch keine Bewertungen
- LS8 Bum 5433845 1 06 PDFDokument1.234 SeitenLS8 Bum 5433845 1 06 PDFtravieso112Noch keine Bewertungen
- Logiq q5Dokument59 SeitenLogiq q5travieso112Noch keine Bewertungen
- LigasureDokument72 SeitenLigasuretravieso112Noch keine Bewertungen
- Ventilador Sechrist Millennium Manual UsuarioDokument81 SeitenVentilador Sechrist Millennium Manual Usuariotravieso112100% (2)
- Cuna Color RadianteDokument2 SeitenCuna Color Radiantetravieso1120% (2)
- La Sopa de PiedraDokument8 SeitenLa Sopa de PiedraBiblioteca RecetorNoch keine Bewertungen
- Rayos X MantenientoDokument54 SeitenRayos X Mantenientotravieso112100% (3)
- Flight 60 SN.15012344 PDFDokument1 SeiteFlight 60 SN.15012344 PDFtravieso112Noch keine Bewertungen
- Registradores Holter HR100 300 1200Dokument36 SeitenRegistradores Holter HR100 300 1200travieso112Noch keine Bewertungen
- Sistema PiccoDokument9 SeitenSistema Piccotravieso112Noch keine Bewertungen
- Manual de Uso de ARRAY-LOGICDokument75 SeitenManual de Uso de ARRAY-LOGICDiego Hernandez100% (1)
- Manual Usuario ConfortDokument28 SeitenManual Usuario Conforttravieso112Noch keine Bewertungen
- TIC 1º BACH TEMA 1 Historia de La Informática, Hardware y Software PDFDokument16 SeitenTIC 1º BACH TEMA 1 Historia de La Informática, Hardware y Software PDFAdriana ZanoliNoch keine Bewertungen
- Evolucion de La RoboticaDokument2 SeitenEvolucion de La RoboticaJose Luis BuenoNoch keine Bewertungen
- Introducción Al Estudio Del DerechoDokument4 SeitenIntroducción Al Estudio Del DerechoJose GarciaNoch keine Bewertungen
- Migracion JuvenilDokument21 SeitenMigracion JuvenilPedro Abdel Rodriguez AmaroNoch keine Bewertungen
- Paradigm AsDokument2 SeitenParadigm AsYader L ChowNoch keine Bewertungen
- Inversión CinemáticaDokument3 SeitenInversión CinemáticaBriannda MoralessNoch keine Bewertungen
- Jurisprudencia TecnicaDokument2 SeitenJurisprudencia TecnicaErik Hernandez GomezNoch keine Bewertungen
- Análisis Institucional - ReflexionDokument10 SeitenAnálisis Institucional - ReflexionPilar GuindoNoch keine Bewertungen
- La Condenacion Al Olvido Damnatio MemoriDokument172 SeitenLa Condenacion Al Olvido Damnatio MemoriPaulaNoch keine Bewertungen
- Cómo CitarDokument9 SeitenCómo CitarFatima ZambranoNoch keine Bewertungen
- Qué Es El Liderazgo y TiposDokument5 SeitenQué Es El Liderazgo y TiposAlexandra M SantosNoch keine Bewertungen
- Hoja de Trabajo y Lectura Dia Del MaízDokument3 SeitenHoja de Trabajo y Lectura Dia Del Maízeduardo cuNoch keine Bewertungen
- Carta Didactica #5Dokument3 SeitenCarta Didactica #5Mónica RaudaNoch keine Bewertungen
- Lentes de HidrogelDokument9 SeitenLentes de HidrogelJazz OramasNoch keine Bewertungen
- Grilla para La Observacion de Clases 2018Dokument4 SeitenGrilla para La Observacion de Clases 2018Adriano Fernando Rivas100% (2)
- Tipos y Arreglos de AntenasDokument22 SeitenTipos y Arreglos de AntenasSantiago Baculima100% (3)
- Barrio Adentro Derecho A La Salud e Inclusion SocialDokument166 SeitenBarrio Adentro Derecho A La Salud e Inclusion SocialWilson Rodriguez Mora100% (1)
- DECLARACION DE IMPACTO AMBIENTAL SENATI SAN RAMONmodificadoDokument40 SeitenDECLARACION DE IMPACTO AMBIENTAL SENATI SAN RAMONmodificadoVerónica Ponce CabreraNoch keine Bewertungen
- 01 Marco Conceptual Evin Digital 2023Dokument18 Seiten01 Marco Conceptual Evin Digital 2023Carolina SesmeNoch keine Bewertungen
- Ley CeroDokument5 SeitenLey CeroLen AbernathyNoch keine Bewertungen
- La LogicaDokument14 SeitenLa LogicaFlores IbetNoch keine Bewertungen
- Práctica 1 Laboratorio VirtualDokument8 SeitenPráctica 1 Laboratorio VirtualEsteban LopezNoch keine Bewertungen
- El Reporte de Lectura Como Técnica para Estudiar Un TextoDokument7 SeitenEl Reporte de Lectura Como Técnica para Estudiar Un TextoMarisol V'cNoch keine Bewertungen
- Manual de Ingreso de PersonalDokument6 SeitenManual de Ingreso de PersonaldavidNoch keine Bewertungen
- Lineas GeodesicasDokument5 SeitenLineas GeodesicasEdgar Aguirre RomeroNoch keine Bewertungen
- Mapa Conceptual - SociologíaDokument1 SeiteMapa Conceptual - SociologíaAlfredito BenavidesNoch keine Bewertungen
- Laboratorio 01 Esfuerzo AxialDokument23 SeitenLaboratorio 01 Esfuerzo Axialkatherine bolañosNoch keine Bewertungen
- WWW Geolibrospdf Com 2015-02-21 Libros de Geologia Descargar Gratis HTMLDokument6 SeitenWWW Geolibrospdf Com 2015-02-21 Libros de Geologia Descargar Gratis HTMLCamila MarcialesNoch keine Bewertungen
- Libro de Texto Frederic Munne La Psicologia Social Como Ciencia TeoricaDokument295 SeitenLibro de Texto Frederic Munne La Psicologia Social Como Ciencia TeoricaferzaratevenceNoch keine Bewertungen
- Marianapeimbert LaHerenciaDelColorDeLosPerrosDokument45 SeitenMarianapeimbert LaHerenciaDelColorDeLosPerrosDannyNoch keine Bewertungen