Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Lab 4Dokument4 SeitenLab 4Harshit LathiNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Internet's Own Boy: A ReviewDokument3 SeitenThe Internet's Own Boy: A ReviewHarshit LathiNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- ME 623A: Finite Element Methods in Engineering Mechanics Assignment - 3Dokument1 SeiteME 623A: Finite Element Methods in Engineering Mechanics Assignment - 3Harshit LathiNoch keine Bewertungen
- HW1 Me623aDokument1 SeiteHW1 Me623aHarshit LathiNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Session 5 PDFDokument26 SeitenSession 5 PDFToufic HageNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- 03-1 Synchronous Machines 1 DNDokument25 Seiten03-1 Synchronous Machines 1 DNsaif thuraonNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Braun KF40 - CDokument17 SeitenBraun KF40 - CAgung UtoyoNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Bs en 00378 3 2016Dokument30 SeitenBs en 00378 3 2016Darius VinNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Pro TrekDokument4 SeitenPro TrekTri WidodoNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Vibration - Electrical or Mechanical - EASADokument3 SeitenVibration - Electrical or Mechanical - EASAGilbNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Intermec CS40 SpecsDokument8 SeitenIntermec CS40 Specsss1222Noch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
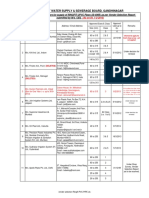
- GWSSB Vendor List 19.11.2013Dokument18 SeitenGWSSB Vendor List 19.11.2013sivesh_rathiNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- TDS Sadechaf UVACRYL 2151 - v9Dokument5 SeitenTDS Sadechaf UVACRYL 2151 - v9Alex MacabuNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- AHRLACDokument18 SeitenAHRLACVictor Pileggi100% (1)
- Bernard D. Marquez Eduardo M. Axalan Engr. William A.L.T. NGDokument1 SeiteBernard D. Marquez Eduardo M. Axalan Engr. William A.L.T. NGRhon Nem KhoNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Manual PC Soundcard Scope 1.4.5Dokument17 SeitenManual PC Soundcard Scope 1.4.5NatashaKillerNoch keine Bewertungen
- RT L2 General Examination PaperDokument4 SeitenRT L2 General Examination PaperdaddadNoch keine Bewertungen
- Differences Between VSI and CSI Converter Operation Modes.Dokument1 SeiteDifferences Between VSI and CSI Converter Operation Modes.Sushil NamoijamNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
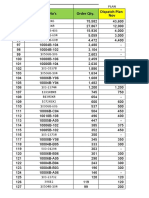
- Order Qty Vs Dispatch Plan - 04 11 20Dokument13 SeitenOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPNoch keine Bewertungen
- JDE ApplicationDokument642 SeitenJDE ApplicationAnonymous cputyzNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- " " Reach: Ordering InformationDokument8 Seiten" " Reach: Ordering InformationTrong TranNoch keine Bewertungen
- Chapter 2 - 2 Plane Curvilinear MotionDokument37 SeitenChapter 2 - 2 Plane Curvilinear MotionAlfredo Ruiz ValenciaNoch keine Bewertungen
- 25252525Dokument38 Seiten25252525Ivan GonzalezNoch keine Bewertungen
- AB-522 Standard Pneumatic Test Procedure RequirementsDokument16 SeitenAB-522 Standard Pneumatic Test Procedure RequirementsShank HackerNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Estimation Software For Presure VesselDokument36 SeitenEstimation Software For Presure VesselKarthikeyan Shanmugavel0% (1)
- IRF350Dokument7 SeitenIRF350sanniviNoch keine Bewertungen
- High Integrity Aluminum (GENERAL)Dokument140 SeitenHigh Integrity Aluminum (GENERAL)Kmilo Giraldo100% (3)
- Woodworking Plans - Wheelbarrow PlanterDokument3 SeitenWoodworking Plans - Wheelbarrow PlanterMirel HotescuNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Published Document Guidance On The Use of BS EN 13108, Bituminous Mixtures - Material SpecificationsDokument8 SeitenPublished Document Guidance On The Use of BS EN 13108, Bituminous Mixtures - Material SpecificationsCristián JiménezNoch keine Bewertungen
- Doing Hot Work On Gas ShipDokument5 SeitenDoing Hot Work On Gas ShipAnonymous icnhaNsFNoch keine Bewertungen
- An Introduction Into The Feynman Path Integral PDFDokument94 SeitenAn Introduction Into The Feynman Path Integral PDFLivardy WufiantoNoch keine Bewertungen
- Schematic Lenovo ThinkPad T410 NOZOMI-1Dokument99 SeitenSchematic Lenovo ThinkPad T410 NOZOMI-1borneocampNoch keine Bewertungen
- Lecure Two. ReactorsDokument56 SeitenLecure Two. ReactorsSophia WambuiNoch keine Bewertungen
- Determination of The Solubility Product Constant of Silver AcetateDokument8 SeitenDetermination of The Solubility Product Constant of Silver AcetateSara Al AzemNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)