Das könnte Ihnen auch gefallen
- Boat Maintenance Companions: Electrics & Diesel Companions at SeaVon EverandBoat Maintenance Companions: Electrics & Diesel Companions at SeaNoch keine Bewertungen
- Roboquad ManualDokument24 SeitenRoboquad ManualDeekayNoch keine Bewertungen
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2Von EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2Noch keine Bewertungen
- Electric Acoustic Guitar: Owner's ManualDokument1 SeiteElectric Acoustic Guitar: Owner's ManualburhanNoch keine Bewertungen
- Roboraptor ManualDokument12 SeitenRoboraptor ManualnmrsNoch keine Bewertungen
- S2 StartupGuide PDFDokument28 SeitenS2 StartupGuide PDFRoverDeLeonNoch keine Bewertungen
- Ase 18 2 GaDokument36 SeitenAse 18 2 Gac131508Noch keine Bewertungen
- Bigfoot The MonsterDokument9 SeitenBigfoot The MonsterFanof EcdNoch keine Bewertungen
- VG Stratocaster®Dokument18 SeitenVG Stratocaster®DaniilKharmsNoch keine Bewertungen
- SB500 FeDokument36 SeitenSB500 FeRobert ZąbekNoch keine Bewertungen
- Daiwa Tanacom Bull 1000 Operating ManualDokument38 SeitenDaiwa Tanacom Bull 1000 Operating Manualffbss29871% (7)
- ESTAR Hubble 11 Manual v1Dokument60 SeitenESTAR Hubble 11 Manual v1Manuel CarboNoch keine Bewertungen
- 93ZJ Secc 8J Turn Signals and Hazard Warning FlashesDokument4 Seiten93ZJ Secc 8J Turn Signals and Hazard Warning Flasheshelgith74Noch keine Bewertungen
- Cargador Li24Dokument4 SeitenCargador Li24Luis IglesiasNoch keine Bewertungen
- Operating Manual: ReferenceDokument40 SeitenOperating Manual: ReferenceАлександр ПавловNoch keine Bewertungen
- W500CInstruction Manual PDFDokument8 SeitenW500CInstruction Manual PDFCESAR ALEXANDER JARAMILLONoch keine Bewertungen
- Detecteur Fuite Tif XL 1aDokument32 SeitenDetecteur Fuite Tif XL 1ajamal chettatiNoch keine Bewertungen
- UWE - MII OperationDokument9 SeitenUWE - MII OperationMatjaž LekšanNoch keine Bewertungen
- Riot Reloaded User GuideDokument6 SeitenRiot Reloaded User GuidedeyviNoch keine Bewertungen
- Syma X5SC Manual PDFDokument14 SeitenSyma X5SC Manual PDFAnayansi MoralesNoch keine Bewertungen
- Syma X22W Kezelési 201809041612520119Dokument19 SeitenSyma X22W Kezelési 201809041612520119Imre KovácsNoch keine Bewertungen
- X600 Manual PDFDokument18 SeitenX600 Manual PDFPedro PerezNoch keine Bewertungen
- User Manual: Features Battery Installation Power TipsDokument2 SeitenUser Manual: Features Battery Installation Power TipsgamwseseNoch keine Bewertungen
- Tomy VerbotDokument20 SeitenTomy VerbotAngel Chans SabrojoNoch keine Bewertungen
- Maintenance Instruction For Superlight Sl-2Dokument15 SeitenMaintenance Instruction For Superlight Sl-2Scripd4dogsonlyNoch keine Bewertungen
- CS-8000 Circuit Seeker Circuit Tracer InstructionDokument48 SeitenCS-8000 Circuit Seeker Circuit Tracer Instructionpichonmaster1989Noch keine Bewertungen
- Marble Mania GalaxyDokument80 SeitenMarble Mania Galaxyhitomi furugawaNoch keine Bewertungen
- Manual ENG Dell Wireless Mouse Wm126Dokument16 SeitenManual ENG Dell Wireless Mouse Wm126kuttanmolutyNoch keine Bewertungen
- 158BCG34HLDokument3 Seiten158BCG34HLChristian CovarrubiasNoch keine Bewertungen
- Operating Manual: ReferenceDokument38 SeitenOperating Manual: ReferencePedro GuerraNoch keine Bewertungen
- SeaBorg 750MT English Manual PDFDokument40 SeitenSeaBorg 750MT English Manual PDFNoor HaslindaNoch keine Bewertungen
- X21W ManualDokument20 SeitenX21W Manualrrojas zonamericaNoch keine Bewertungen
- 40-6515 ManualDokument84 Seiten40-6515 ManualewintersNoch keine Bewertungen
- Remote Control Unit: Operating DENON Audio ComponentsDokument5 SeitenRemote Control Unit: Operating DENON Audio Componentsmarvin3178Noch keine Bewertungen
- Ampstik XT WJ Single Read Web Manual V01-006Dokument12 SeitenAmpstik XT WJ Single Read Web Manual V01-006DIEGO ALEJANDRO CHARRY GUTIERREZNoch keine Bewertungen
- Battery Charger BT-C3100 OPERATING INSTRUCTIONS: 2. Delivery ContentDokument4 SeitenBattery Charger BT-C3100 OPERATING INSTRUCTIONS: 2. Delivery Contentahmad akhyarNoch keine Bewertungen
- Energizer CH15MNCP4 DatasheetDokument1 SeiteEnergizer CH15MNCP4 DatasheetJuan Carlos Parra FloresNoch keine Bewertungen
- Lanterna Frontala Cu LED H25S SST40Dokument2 SeitenLanterna Frontala Cu LED H25S SST40costin5Noch keine Bewertungen
- 1KR FE+Service+ManualDokument2.784 Seiten1KR FE+Service+ManualCajas Automaticas David100% (5)
- User Manual: High Performance 4-Channel Camera QuadcopterDokument8 SeitenUser Manual: High Performance 4-Channel Camera QuadcopterVicnaraj VicNoch keine Bewertungen
- Service Manual: Currency Discrimination CounterDokument85 SeitenService Manual: Currency Discrimination CounterАлександр ПерфоуховNoch keine Bewertungen
- Night Vapor Manual enDokument16 SeitenNight Vapor Manual enPKMNoch keine Bewertungen
- Fisher-Price G5780 Motorized Toy Car User ManualDokument4 SeitenFisher-Price G5780 Motorized Toy Car User ManualAditya ManchandaNoch keine Bewertungen
- Wireless Mouse Tecknet m002 PDFDokument20 SeitenWireless Mouse Tecknet m002 PDFsarvanrbNoch keine Bewertungen
- Psu Iii LedDokument3 SeitenPsu Iii LedRobert KlevenNoch keine Bewertungen
- UPSLift User Manual v1.4xDokument8 SeitenUPSLift User Manual v1.4xR-electro RachidNoch keine Bewertungen
- Operating Manual: ReferenceDokument35 SeitenOperating Manual: ReferenceSoukou Fishing KorinthosNoch keine Bewertungen
- HT500S BritishDokument27 SeitenHT500S Britishhaithem.mohmedNoch keine Bewertungen
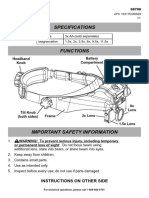
- Specifications: Batteries 3x AA (Sold Separately) Magnification 1.5x, 2x, 3.5x, 8x, 9.5x, 11.5xDokument2 SeitenSpecifications: Batteries 3x AA (Sold Separately) Magnification 1.5x, 2x, 3.5x, 8x, 9.5x, 11.5xMonse RoseyNoch keine Bewertungen
- Proaim Spin 3 Axis Motorized Pan Tilt Head PT SPIN 3Dokument5 SeitenProaim Spin 3 Axis Motorized Pan Tilt Head PT SPIN 3Ismael Morales HerreraNoch keine Bewertungen
- VL1 ManualDokument33 SeitenVL1 ManualjhuuuyyyNoch keine Bewertungen
- User Manual: Platinum 100A-HV-V3Dokument1 SeiteUser Manual: Platinum 100A-HV-V3gaveron69Noch keine Bewertungen
- Operating Instructions Operating Instructions: Nano-L SMJ Nano-L SMJ R-16, R-CAN R-16, R-CANDokument20 SeitenOperating Instructions Operating Instructions: Nano-L SMJ Nano-L SMJ R-16, R-CAN R-16, R-CANpopo20084455Noch keine Bewertungen
- Signal Reverser For Railway SignalingDokument23 SeitenSignal Reverser For Railway SignalingVikas Srivastav100% (1)
- Robart Electric Retract Series Instruction Manual: Thank YouDokument2 SeitenRobart Electric Retract Series Instruction Manual: Thank YourobNoch keine Bewertungen
- ControlDokument24 SeitenControlDOMINGOSERPA4148Noch keine Bewertungen
- Hytera ps22002 ManualDokument11 SeitenHytera ps22002 ManualUrza RumpokoNoch keine Bewertungen
- User Manual: FeaturesDokument1 SeiteUser Manual: Featureskunal royNoch keine Bewertungen
- Valoru00ae 4000 Instruction ManualDokument112 SeitenValoru00ae 4000 Instruction ManualManuel AguilarNoch keine Bewertungen
- Contact-Tracing-Survey v4Dokument38 SeitenContact-Tracing-Survey v4mozartatplayNoch keine Bewertungen
- Coverage and Capacity Analysis of LTE Radio NetworDokument9 SeitenCoverage and Capacity Analysis of LTE Radio NetwormozartatplayNoch keine Bewertungen
- DTPS Policy Direction On The Licensing of High Demand SpectrumDokument49 SeitenDTPS Policy Direction On The Licensing of High Demand SpectrummozartatplayNoch keine Bewertungen
- Ammbr White PaperDokument76 SeitenAmmbr White PapermozartatplayNoch keine Bewertungen
- Covid19 Report Ccsa PDFDokument90 SeitenCovid19 Report Ccsa PDFsiyagNoch keine Bewertungen
- Focus On The Oncology Care Programme 2016Dokument4 SeitenFocus On The Oncology Care Programme 2016mozartatplayNoch keine Bewertungen
- Focus On The Extender Option 2017Dokument9 SeitenFocus On The Extender Option 2017mozartatplayNoch keine Bewertungen
- Multiply Premier Points Guide For 2017Dokument4 SeitenMultiply Premier Points Guide For 2017mozartatplayNoch keine Bewertungen
- LTE and LTE-Advanced Factsheet: The "Long Term Evolution" of UMTSDokument16 SeitenLTE and LTE-Advanced Factsheet: The "Long Term Evolution" of UMTSDeepayan ChoudhuryNoch keine Bewertungen
- Lte AdvancedDokument60 SeitenLte AdvancedGerman FloresNoch keine Bewertungen
- Channel Allocation UK Patent Appl GB 2522927 PDFDokument35 SeitenChannel Allocation UK Patent Appl GB 2522927 PDFmozartatplayNoch keine Bewertungen
- Users Manual: Voltage Quality RecorderDokument18 SeitenUsers Manual: Voltage Quality RecordermozartatplayNoch keine Bewertungen
- Gnu PlotDokument205 SeitenGnu Plotapi-3708428Noch keine Bewertungen
- Dell 4100MP User ManualDokument50 SeitenDell 4100MP User ManualmozartatplayNoch keine Bewertungen
- Did You KnowDokument75 SeitenDid You KnowmozartatplayNoch keine Bewertungen
- Learning To WindsurfDokument29 SeitenLearning To WindsurfmozartatplayNoch keine Bewertungen
- Batman Ifip2Dokument10 SeitenBatman Ifip2mozartatplayNoch keine Bewertungen
- Automotive EngineeringDokument4 SeitenAutomotive EngineeringIrinaNoch keine Bewertungen
- Servicemanual Peugeot Euro 4 PDFDokument16 SeitenServicemanual Peugeot Euro 4 PDFsky100% (2)
- ABS960 Brochure 1113Dokument4 SeitenABS960 Brochure 1113hendryNoch keine Bewertungen
- Dataprep Cheat SheetDokument1 SeiteDataprep Cheat Sheetgaston_russo87Noch keine Bewertungen
- Fortios v7.0.0 Release NotesDokument91 SeitenFortios v7.0.0 Release NotesSandro Henrique de OliveiraNoch keine Bewertungen
- CSE 425 Fall Midterm 2020 AssessmentDokument1 SeiteCSE 425 Fall Midterm 2020 AssessmentMd.Rakibul IslamNoch keine Bewertungen
- Ec-1 Unit 3Dokument24 SeitenEc-1 Unit 3Mohammed OvaizNoch keine Bewertungen
- Aoc Monitor I2475PXQUDokument1 SeiteAoc Monitor I2475PXQUdeki0007Noch keine Bewertungen
- Iso 14064 3 2019 en PDFDokument11 SeitenIso 14064 3 2019 en PDFTatel River0% (1)
- Review If Transparent Solar Photovoltaic TechnologiesDokument13 SeitenReview If Transparent Solar Photovoltaic TechnologiesSharonNoch keine Bewertungen
- Introduction To The 6 Basic Audio MeasurementsDokument12 SeitenIntroduction To The 6 Basic Audio MeasurementsZoeloe_2Noch keine Bewertungen
- HW2 - TCMT - Nhóm ADokument4 SeitenHW2 - TCMT - Nhóm ALớp 18DT3 DUT - Bách Khoa Đà NẵngNoch keine Bewertungen
- Hydroform: Manual and Semi-Automated Corrosion MappingDokument2 SeitenHydroform: Manual and Semi-Automated Corrosion MappingLEONARDOUS7Noch keine Bewertungen
- Template RFP Draft (050516)Dokument13 SeitenTemplate RFP Draft (050516)UGHANoch keine Bewertungen
- An Honest Account of The Humbling Experi PDFDokument424 SeitenAn Honest Account of The Humbling Experi PDFGayatriNoch keine Bewertungen
- Coordinating Parallel Hierarchical Storage ManagemDokument16 SeitenCoordinating Parallel Hierarchical Storage ManagemAdane AbateNoch keine Bewertungen
- SIEMENS 03 Modelling Uninterruptible Power Supply in SIMARIS Design For Use in Data CentresDokument12 SeitenSIEMENS 03 Modelling Uninterruptible Power Supply in SIMARIS Design For Use in Data CentresShailesh ChettyNoch keine Bewertungen
- Hybrid Power Generation SlideDokument23 SeitenHybrid Power Generation SlideCnp1 Cnp1Noch keine Bewertungen
- Single Stage Rotary: World Class Efficiency ReliabilityDokument5 SeitenSingle Stage Rotary: World Class Efficiency ReliabilitySyed Arham MurtazaNoch keine Bewertungen
- Python Date TimeDokument5 SeitenPython Date Timemlungisigcabashe44Noch keine Bewertungen
- Wibree TechnologyDokument21 SeitenWibree TechnologyMalathi CslNoch keine Bewertungen
- Example Practical ReportDokument45 SeitenExample Practical ReportMohd Zulhilmi84% (19)
- Capacitor ABB CLMD - Spec - ABB CapacitorDokument8 SeitenCapacitor ABB CLMD - Spec - ABB CapacitorKR WaruneeNoch keine Bewertungen
- Ccs352-Maa - SyllabusDokument3 SeitenCcs352-Maa - SyllabusReshma Radhakrishnan0% (1)
- 7528Dokument3 Seiten7528Oscar PereiraNoch keine Bewertungen
- 1PH EswfDokument9 Seiten1PH EswfSomaraju PitchikaNoch keine Bewertungen
- Arduino LCD Set Up2Dokument10 SeitenArduino LCD Set Up2Mikaela MosqueraNoch keine Bewertungen
- Fazlur KhanDokument19 SeitenFazlur KhanyisauNoch keine Bewertungen
- CONTENTS Hyundai Excavator - R35Z 7 - Parts Catalog 280pagesDokument15 SeitenCONTENTS Hyundai Excavator - R35Z 7 - Parts Catalog 280pagesKen LeeNoch keine Bewertungen