Das könnte Ihnen auch gefallen
- Agenda - 2 - TRAYECTO INICIALDokument2 SeitenAgenda - 2 - TRAYECTO INICIALAlex Medina GuaidoNoch keine Bewertungen
- Formato - ejercicio.S2.TED (Si Realizar)Dokument5 SeitenFormato - ejercicio.S2.TED (Si Realizar)Alex Medina GuaidoNoch keine Bewertungen
- Solucion Tecnologica 2021 - VozDokument2 SeitenSolucion Tecnologica 2021 - VozAlex Medina GuaidoNoch keine Bewertungen
- Las Reflexiones ContinúanDokument3 SeitenLas Reflexiones ContinúanAlex Medina GuaidoNoch keine Bewertungen
- Técnicas de EstudioDokument4 SeitenTécnicas de EstudioAlex Medina Guaido50% (2)
- Manual DebianDokument8 SeitenManual DebianAlex Medina GuaidoNoch keine Bewertungen
- El Sentido de La Libertad (Reflexion)Dokument4 SeitenEl Sentido de La Libertad (Reflexion)Alex Medina GuaidoNoch keine Bewertungen
- EducacionDokument7 SeitenEducacionAlex Medina GuaidoNoch keine Bewertungen
- Capitulo 1 - DaqDokument8 SeitenCapitulo 1 - DaqAlex Medina GuaidoNoch keine Bewertungen
- TMP - 21421-Vilo - Copia1066848967Dokument7 SeitenTMP - 21421-Vilo - Copia1066848967Alex Medina GuaidoNoch keine Bewertungen
- Del Iute A La Uptm - Universidad Politecnica Territorial Del Estado Merida Kleber RamirezDokument2 SeitenDel Iute A La Uptm - Universidad Politecnica Territorial Del Estado Merida Kleber RamirezAlex Medina GuaidoNoch keine Bewertungen
- Informe Del Diagrama de GanttDokument5 SeitenInforme Del Diagrama de GanttAlex Medina Guaido25% (4)
- Documento Sesa Def IDokument80 SeitenDocumento Sesa Def IAlex Medina GuaidoNoch keine Bewertungen
- TMP - 30721-Programa Estudio Acadmico de Ing Mecatronica (UNEXPO) - 113541710Dokument51 SeitenTMP - 30721-Programa Estudio Acadmico de Ing Mecatronica (UNEXPO) - 113541710Alex Medina Guaido100% (1)
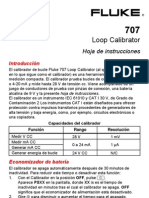
- Fluke - Generador de LazoDokument16 SeitenFluke - Generador de LazoJoel CandiaNoch keine Bewertungen
- CAPITULO IIIP SuperterminadoDokument29 SeitenCAPITULO IIIP SuperterminadoDAVIDNoch keine Bewertungen
- Virtual Port ChannelDokument75 SeitenVirtual Port Channelmarco_mendozalopez100% (1)
- Informe Sonometria - Principal Silvestre ArenasDokument24 SeitenInforme Sonometria - Principal Silvestre ArenasArcelia PerezNoch keine Bewertungen
- E DWPP 2020Dokument11 SeitenE DWPP 2020Eduardo Antonio Juarez CarreonNoch keine Bewertungen
- 1.7.2.los Materiales de Aporte para SoldaduraDokument11 Seiten1.7.2.los Materiales de Aporte para SoldaduraMiguel Sandoval CrisantoNoch keine Bewertungen
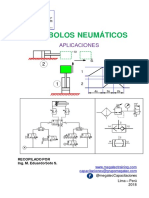
- Simbolos NeumaticosDokument46 SeitenSimbolos NeumaticosWaldir Jhon Gonzalez67% (3)
- Plasticos Fluorados 1,2,3 e Introduccion.Dokument14 SeitenPlasticos Fluorados 1,2,3 e Introduccion.'JoseanVillegasNoch keine Bewertungen
- Tu Propia Fuente de Voltaje Regulable. - Hazlo Tu MismoDokument21 SeitenTu Propia Fuente de Voltaje Regulable. - Hazlo Tu Mismomaestroluisma100% (1)
- 43LH570T DJ - 1025 3732 PDFDokument39 Seiten43LH570T DJ - 1025 3732 PDFLilianitaRizoNoch keine Bewertungen
- Decodificador de BCD A 7 Segmentos Con eDokument6 SeitenDecodificador de BCD A 7 Segmentos Con eAgustín Camacho SuárezNoch keine Bewertungen
- UNIDAD 1 - Bloques FuncionalesDokument12 SeitenUNIDAD 1 - Bloques FuncionalesJulio Castillo50% (2)
- Banco Automatico de Capacitores en Baja TensionDokument8 SeitenBanco Automatico de Capacitores en Baja TensionHadesHadesNoch keine Bewertungen
- Como Restaurar Tu PC A Su Configuracion de Fabrica Sin El CD DVD de Windows Vista o XP 2975 Oq151iDokument2 SeitenComo Restaurar Tu PC A Su Configuracion de Fabrica Sin El CD DVD de Windows Vista o XP 2975 Oq151ilosorioggm1965Noch keine Bewertungen
- Evidencias de Aprendizaje 2Dokument5 SeitenEvidencias de Aprendizaje 2René Solórzano Soberanes100% (1)
- Tema 4. Amplificadores y AltavocesDokument1 SeiteTema 4. Amplificadores y AltavocespopeyeNoch keine Bewertungen
- Laboratorio de Mallas PDFDokument3 SeitenLaboratorio de Mallas PDFElias Ladino100% (1)
- Uso de RMAN para Copias de Seguridad y Restaurar ArchivosDokument14 SeitenUso de RMAN para Copias de Seguridad y Restaurar ArchivosJulie RobertsNoch keine Bewertungen
- Accesorios BMW E46Dokument35 SeitenAccesorios BMW E46Chimo Borras Sanchez100% (1)
- OptoelectrónicaDokument3 SeitenOptoelectrónicaMejía Ramírez FernandoNoch keine Bewertungen
- Tarea Microondas PDFDokument18 SeitenTarea Microondas PDFCarlos ReinosoNoch keine Bewertungen
- Electronica PDFDokument177 SeitenElectronica PDFhackinjc100% (1)
- Cotizacion - 031 - 2018 - Suministro de Materiales Cableado Estructurado - Kimbiri PDFDokument1 SeiteCotizacion - 031 - 2018 - Suministro de Materiales Cableado Estructurado - Kimbiri PDFSantiago Paul-SoulNoch keine Bewertungen
- Informe Tecnico Efrain CoyagoDokument11 SeitenInforme Tecnico Efrain CoyagoPricila BarreraNoch keine Bewertungen
- Realizar Simulaciones Aplicando Herramientas Tipo SoftwareDokument11 SeitenRealizar Simulaciones Aplicando Herramientas Tipo SoftwareCindy HernandezNoch keine Bewertungen
- MidiDokument28 SeitenMidiFelipe MosseNoch keine Bewertungen
- Manual Lab - Electronica IDokument102 SeitenManual Lab - Electronica Ijeison ariasNoch keine Bewertungen
- Aplicaciones Moviles y Servicios Web Con LabVIEWDokument30 SeitenAplicaciones Moviles y Servicios Web Con LabVIEWEzequiel DiazNoch keine Bewertungen
- Geolocalización y GeorreferenciaciónDokument7 SeitenGeolocalización y GeorreferenciaciónHomer VasquezNoch keine Bewertungen
- EspecificacionesDokument2 SeitenEspecificacionesJimenezLizzetNoch keine Bewertungen