Das könnte Ihnen auch gefallen
- Universiti Tun Hussein Onn Malaysia Faculty of Mechanical and Manufacturing Engineering BDA 24202 Computer Programming Individual Assignment (10%)Dokument2 SeitenUniversiti Tun Hussein Onn Malaysia Faculty of Mechanical and Manufacturing Engineering BDA 24202 Computer Programming Individual Assignment (10%)StudiePurposeNoch keine Bewertungen
- Individual Project Manual: ObjectiveDokument27 SeitenIndividual Project Manual: ObjectiveNeymar JrNoch keine Bewertungen
- Analyzing Simple Structures in Engineering Mechanics (CENG1041Dokument9 SeitenAnalyzing Simple Structures in Engineering Mechanics (CENG1041nvnrevNoch keine Bewertungen
- Velocity and Acceleration Lab Result (Car Ramp)Dokument3 SeitenVelocity and Acceleration Lab Result (Car Ramp)Ugur ASİT60% (5)
- Chapter 5 TrigonometryDokument131 SeitenChapter 5 Trigonometryjoseph yuNoch keine Bewertungen
- SolutionDokument6 SeitenSolutionTare Er KshitijNoch keine Bewertungen
- Mechanics of Solids by Crandall, Dahl, LardnerDokument79 SeitenMechanics of Solids by Crandall, Dahl, Lardnerpurijatin100% (6)
- Pneumatic Components and Circuits TOCDokument11 SeitenPneumatic Components and Circuits TOCAhmadFikri DotMpeg100% (2)
- Mechanical Workshop Practice ReportDokument6 SeitenMechanical Workshop Practice ReportMuhd AkmalNoch keine Bewertungen
- Mec 281Dokument559 SeitenMec 281Hafizuddin Haris100% (2)
- Background of Sanyco Grand Industries SDN BHDDokument5 SeitenBackground of Sanyco Grand Industries SDN BHDcrewz_19Noch keine Bewertungen
- Assignment 1 EeDokument3 SeitenAssignment 1 EeDr-Tarun ParasharNoch keine Bewertungen
- Engineering Mechanics Lab ManualDokument10 SeitenEngineering Mechanics Lab Manualabdul hameed khanNoch keine Bewertungen
- CV Helmy 2011Dokument48 SeitenCV Helmy 2011ateeqshahid035Noch keine Bewertungen
- Full Report Solid MechDokument19 SeitenFull Report Solid MechMUHAMMAD ARIFF DYAMIMNoch keine Bewertungen
- Imran Lab 4Dokument6 SeitenImran Lab 4BM4-0620 Ibrahim Bin YusriNoch keine Bewertungen
- Numerical Analysis 1Dokument21 SeitenNumerical Analysis 1Maged Mohammad Hassan100% (1)
- Strength of Materials (15CV 32) : Module 1: Simple Stresses and StrainsDokument34 SeitenStrength of Materials (15CV 32) : Module 1: Simple Stresses and StrainsAnonymous Qm0zbNkNoch keine Bewertungen
- Technical Drawings For Toaster Automata 1Dokument8 SeitenTechnical Drawings For Toaster Automata 1api-371765117Noch keine Bewertungen
- Mt-I 2 Marks With Answer PDFDokument15 SeitenMt-I 2 Marks With Answer PDFSiva RamanNoch keine Bewertungen
- Power Steering PDFDokument9 SeitenPower Steering PDFNaveen yadavNoch keine Bewertungen
- Lec 4 Rotational Mechanical SystemDokument14 SeitenLec 4 Rotational Mechanical SystemFelopateer EmadNoch keine Bewertungen
- Addition Mathematic Form 5 Progression Module 1Dokument15 SeitenAddition Mathematic Form 5 Progression Module 1Umaish NairNoch keine Bewertungen
- Heat Trans CH 4-2Dokument32 SeitenHeat Trans CH 4-2AhmadJaffarGulfarazNoch keine Bewertungen
- Applied Mathematics IIDokument2 SeitenApplied Mathematics IIAnubHav YadAvNoch keine Bewertungen
- Experiment 1: Extension of Spring: Program Kejuruteraan Mekanikal Fakulti Industri KejuruteraanDokument3 SeitenExperiment 1: Extension of Spring: Program Kejuruteraan Mekanikal Fakulti Industri KejuruteraanmrsmartguysNoch keine Bewertungen
- Engineering Physics 2 Unit-5Dokument98 SeitenEngineering Physics 2 Unit-5Sriram J0% (1)
- Dynamic Experiment 3Dokument6 SeitenDynamic Experiment 3anis suhailiNoch keine Bewertungen
- Tensile Test (Zuhair)Dokument4 SeitenTensile Test (Zuhair)SaifAdamz'sNoch keine Bewertungen
- MOM Lab 8 NEWDokument7 SeitenMOM Lab 8 NEWSaragadam Naga Shivanath RauNoch keine Bewertungen
- 5.1 ElectronDokument53 Seiten5.1 ElectronFarish MikhaelNoch keine Bewertungen
- Module BDA27301 StaticsDokument39 SeitenModule BDA27301 StaticsZarul IkramNoch keine Bewertungen
- Index: 1. Abstract 5 6 3. Design 8Dokument46 SeitenIndex: 1. Abstract 5 6 3. Design 8prajeeshNoch keine Bewertungen
- Forested Area StatisticsDokument15 SeitenForested Area StatisticsMARIA NATASYANoch keine Bewertungen
- Materials Science & Engineering Introductory E-BookDokument13 SeitenMaterials Science & Engineering Introductory E-BookSmitha KollerahithluNoch keine Bewertungen
- MAKAUT Solid Mechanics SyllabusDokument1 SeiteMAKAUT Solid Mechanics SyllabusRTET Plagiarism CheckNoch keine Bewertungen
- Chapter 4 Teacher S Guide 2009Dokument33 SeitenChapter 4 Teacher S Guide 2009Chen ShyanNoch keine Bewertungen
- Observations and FindingsDokument2 SeitenObservations and FindingsJustin Mark AgtingNoch keine Bewertungen
- Engineering Mathematics 3Dokument3 SeitenEngineering Mathematics 3kumudba zalaNoch keine Bewertungen
- Mat DLP KSSM t5 Chapter 8 Mathematical ModelingDokument18 SeitenMat DLP KSSM t5 Chapter 8 Mathematical ModelingMARIANINoch keine Bewertungen
- UiTM Sheet Metal Report Form GuideDokument7 SeitenUiTM Sheet Metal Report Form Guideafif lah100% (1)
- Project Report on Rack and Pinion Gear DesignDokument15 SeitenProject Report on Rack and Pinion Gear DesignWaqasNoch keine Bewertungen
- Basic of Shear Force and Bending MomentDokument6 SeitenBasic of Shear Force and Bending MomentRathin RakshitNoch keine Bewertungen
- CNC Machining Report - Wheel BaseDokument25 SeitenCNC Machining Report - Wheel BaseMichael M. W. de SilvaNoch keine Bewertungen
- Mass Moment of InertiaDokument1 SeiteMass Moment of InertiaJaycee NodadoNoch keine Bewertungen
- Lab Report - Electric MachinesDokument10 SeitenLab Report - Electric MachinesLUQMAN AMMARNoch keine Bewertungen
- EL 1-1: Fundamentals of Static Experiment Lab SheetDokument7 SeitenEL 1-1: Fundamentals of Static Experiment Lab Sheetkhairul rizmanNoch keine Bewertungen
- Fitting Workshop Report UthmDokument18 SeitenFitting Workshop Report UthmkurttaufiqhakimiNoch keine Bewertungen
- Work Done by A Variable Force (Vertical)Dokument7 SeitenWork Done by A Variable Force (Vertical)Hafiezul Hassan50% (2)
- JJ310 STRENGTH OF MATERIAL Chapter 1 (A) Forces On MaterialDokument18 SeitenJJ310 STRENGTH OF MATERIAL Chapter 1 (A) Forces On MaterialAh Tiang100% (1)
- Critical Load On StrutDokument5 SeitenCritical Load On StrutelhammeNoch keine Bewertungen
- Workshop Safety GuideDokument58 SeitenWorkshop Safety GuideMonikandonNoch keine Bewertungen
- Lab 2Dokument4 SeitenLab 2Sushant Pradhan0% (1)
- Hydraulic Lab ReportDokument2 SeitenHydraulic Lab ReportAllaFonteNoch keine Bewertungen
- Arc N Gas ReportDokument25 SeitenArc N Gas ReportAnahAlhabshiNoch keine Bewertungen
- Fusion ReportDokument67 SeitenFusion ReportDipanshu100% (1)
- Front-Tracking Finite Difference Methods For The American OptionDokument17 SeitenFront-Tracking Finite Difference Methods For The American Optionwei ZhouNoch keine Bewertungen
- Solution of The Black-Scholes Equation Via The Adomian Decomposition MethodDokument9 SeitenSolution of The Black-Scholes Equation Via The Adomian Decomposition MethodZohiab ZafarNoch keine Bewertungen
- Linear programming and transportation problem solutionsDokument8 SeitenLinear programming and transportation problem solutionsReiner Jan AlcantaraNoch keine Bewertungen
- RIL Media Release Q2 FY21 30102020Dokument19 SeitenRIL Media Release Q2 FY21 30102020Krishan ParwaniNoch keine Bewertungen
- PI Industries Ltd. Annual Report 2018-19 Deepening Technological CapabilitiesDokument207 SeitenPI Industries Ltd. Annual Report 2018-19 Deepening Technological CapabilitiesKrishan ParwaniNoch keine Bewertungen
- Fine Organic Industries Limited Annual Report 2019-20Dokument201 SeitenFine Organic Industries Limited Annual Report 2019-20Krishan ParwaniNoch keine Bewertungen
- Teflubenzuron (190) : Physical and Chemical PropertiesDokument102 SeitenTeflubenzuron (190) : Physical and Chemical PropertiesKrishan ParwaniNoch keine Bewertungen
- AnnualReport12 13Dokument188 SeitenAnnualReport12 13Krishan ParwaniNoch keine Bewertungen
- Annualrep2010 2011 PDFDokument101 SeitenAnnualrep2010 2011 PDFKrishan ParwaniNoch keine Bewertungen
- Teflubenzuron (190) : Physical and Chemical PropertiesDokument102 SeitenTeflubenzuron (190) : Physical and Chemical PropertiesKrishan ParwaniNoch keine Bewertungen
- The Hidden Dangers of Historical SimulationDokument5 SeitenThe Hidden Dangers of Historical SimulationKrishan ParwaniNoch keine Bewertungen
- 24 HoursDokument1 Seite24 HoursKrishan ParwaniNoch keine Bewertungen
- Why Tis for Stock Analysis InsightsDokument1 SeiteWhy Tis for Stock Analysis InsightsKrishan ParwaniNoch keine Bewertungen
- Date HS Code: Export GeniusDokument5 SeitenDate HS Code: Export GeniusKrishan ParwaniNoch keine Bewertungen
- Theory of Value - DebreuDokument126 SeitenTheory of Value - DebreuRob WaiserNoch keine Bewertungen
- 24 HoursDokument1 Seite24 HoursKrishan ParwaniNoch keine Bewertungen
- Theory of Value - DebreuDokument126 SeitenTheory of Value - DebreuRob WaiserNoch keine Bewertungen
- Pushpak Viman1Dokument7 SeitenPushpak Viman1Krishan ParwaniNoch keine Bewertungen
- How Mining Companies Evaluet Their Stock PriceDokument32 SeitenHow Mining Companies Evaluet Their Stock PriceKrishan ParwaniNoch keine Bewertungen
- Macro Problem Set 2Dokument6 SeitenMacro Problem Set 2Krishan ParwaniNoch keine Bewertungen
- Optimization Lecture 1Dokument3 SeitenOptimization Lecture 1Krishan ParwaniNoch keine Bewertungen
- SCM NotesDokument29 SeitenSCM NotesNisha Pradeepa100% (2)
- Opening Up The Prescriptive Authority PipelineDokument10 SeitenOpening Up The Prescriptive Authority PipelineJohn GavazziNoch keine Bewertungen
- MunnarDokument5 SeitenMunnarvisujinuNoch keine Bewertungen
- Basic Accounting Principles and Budgeting FundamentalsDokument24 SeitenBasic Accounting Principles and Budgeting Fundamentalskebaman1986Noch keine Bewertungen
- Chapter 7 - Trade and Investment EnvironmentDokument7 SeitenChapter 7 - Trade and Investment EnvironmentMa. Cristel Rovi RibucanNoch keine Bewertungen
- Tdi Hazid TemplateDokument11 SeitenTdi Hazid TemplateAnonymous rwojPlYNoch keine Bewertungen
- Klasifikasi Industri Perusahaan TercatatDokument39 SeitenKlasifikasi Industri Perusahaan TercatatFz FuadiNoch keine Bewertungen
- Web Based Tour Management for Bamboo ParadiseDokument11 SeitenWeb Based Tour Management for Bamboo Paradisemohammed BiratuNoch keine Bewertungen
- Module 1 (Social Innovation)Dokument7 SeitenModule 1 (Social Innovation)Marinette Medrano50% (2)
- Wizard's App Pitch Deck by SlidesgoDokument52 SeitenWizard's App Pitch Deck by SlidesgoandreaNoch keine Bewertungen
- Interview Tips 1Dokument19 SeitenInterview Tips 1mdsd57% (7)
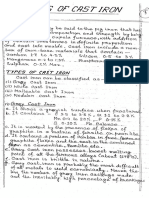
- Welding of Cast IronDokument10 SeitenWelding of Cast IronKrishnendu RouthNoch keine Bewertungen
- Cough: by Dr. Meghana Patil (Intern Batch 2016)Dokument24 SeitenCough: by Dr. Meghana Patil (Intern Batch 2016)Meghana PatilNoch keine Bewertungen
- In Gov cbse-SSCER-191298202020 PDFDokument1 SeiteIn Gov cbse-SSCER-191298202020 PDFrishichauhan25Noch keine Bewertungen
- Kinetics of Acetone Hydrogenation For Synthesis of Isopropyl Alcohol Over Cu-Al Mixed Oxide CatalystsDokument9 SeitenKinetics of Acetone Hydrogenation For Synthesis of Isopropyl Alcohol Over Cu-Al Mixed Oxide Catalysts李国俊Noch keine Bewertungen
- The Importance of Personal Protective Equipment in Pesticide App 2018Dokument4 SeitenThe Importance of Personal Protective Equipment in Pesticide App 2018Anees MalikNoch keine Bewertungen
- Sonydsp v77 SM 479622 PDFDokument41 SeitenSonydsp v77 SM 479622 PDFmorvetrNoch keine Bewertungen
- Edgevpldt Legazpi - Ee As-Built 121922Dokument10 SeitenEdgevpldt Legazpi - Ee As-Built 121922Debussy PanganibanNoch keine Bewertungen
- Banking Finance Agile TestingDokument4 SeitenBanking Finance Agile Testinganil1karnatiNoch keine Bewertungen
- TT100 Viscometer: For Inline Systems ApplicationsDokument2 SeitenTT100 Viscometer: For Inline Systems ApplicationsPablo Antu Manque RodriguezNoch keine Bewertungen
- ADVOCACY AND LOBBYING NDokument7 SeitenADVOCACY AND LOBBYING NMwanza MaliiNoch keine Bewertungen
- Gil Sanchez, Labason Zamboanga Del Norte: AmacaDokument2 SeitenGil Sanchez, Labason Zamboanga Del Norte: AmacaMacky BirdNoch keine Bewertungen
- 244256-Exabeam Security Content in The Legacy Structure-Pdf-EnDokument142 Seiten244256-Exabeam Security Content in The Legacy Structure-Pdf-EnYoussef MohamedNoch keine Bewertungen
- Y-Site Drug Compatibility TableDokument6 SeitenY-Site Drug Compatibility TableArvenaa SubramaniamNoch keine Bewertungen
- Graphics Coursework GcseDokument7 SeitenGraphics Coursework Gcseafiwhlkrm100% (2)
- Evoked PotentialsDokument49 SeitenEvoked PotentialsparuNoch keine Bewertungen
- Data Science Machine LearningDokument15 SeitenData Science Machine LearningmagrinraphaelNoch keine Bewertungen
- University of The West of England (Uwe) : Bristol Business School MSC Management (International Human Resource Management)Dokument5 SeitenUniversity of The West of England (Uwe) : Bristol Business School MSC Management (International Human Resource Management)Olusegun_Spend_3039Noch keine Bewertungen
- Tối Ưu Hóa Cho Khoa Học Dữ LiệuDokument64 SeitenTối Ưu Hóa Cho Khoa Học Dữ Liệuminhpc2911Noch keine Bewertungen