Das könnte Ihnen auch gefallen
- 2022 R1 Ansys Product Portfolio - Customer PresentationDokument24 Seiten2022 R1 Ansys Product Portfolio - Customer PresentationSamuel ThomasNoch keine Bewertungen
- Ansys Discovery Live: Advanced Modeling & Simulation Seminar Series NASA Ames Research Center, October 5, 2017Dokument21 SeitenAnsys Discovery Live: Advanced Modeling & Simulation Seminar Series NASA Ames Research Center, October 5, 2017SuryaNoch keine Bewertungen
- Application for Design of Members in Tension and BendingDokument48 SeitenApplication for Design of Members in Tension and BendingVictor TvvNoch keine Bewertungen
- Simulation of Fatigue Composite Ncode To Post2 PDFDokument31 SeitenSimulation of Fatigue Composite Ncode To Post2 PDFylionkingxNoch keine Bewertungen
- 05 PEmag Assorted Features - v2017Dokument15 Seiten05 PEmag Assorted Features - v2017ShradhaSharma100% (1)
- PD CENTR 16332-2012 Non-Destructive TestingDokument21 SeitenPD CENTR 16332-2012 Non-Destructive TestingWHWENNoch keine Bewertungen
- Ansys Flu - BatDokument30 SeitenAnsys Flu - BatNikola BoskovicNoch keine Bewertungen
- ANSYS17.0 NCode Standard Online Training L2Dokument11 SeitenANSYS17.0 NCode Standard Online Training L2sergiogigiaNoch keine Bewertungen
- Optimized Designs For Durability and FatigueDokument26 SeitenOptimized Designs For Durability and FatigueJohn CenaNoch keine Bewertungen
- RCPretorius AWS Weld Strength CalculationsDokument1 SeiteRCPretorius AWS Weld Strength CalculationsrcpretoriusNoch keine Bewertungen
- ACT - Piezo & MEMS Extension - WS1 - Piezoelectric FanDokument21 SeitenACT - Piezo & MEMS Extension - WS1 - Piezoelectric FanMiguel PanessoNoch keine Bewertungen
- How to Create Pipe Development Drawings in Tekla StructuresDokument4 SeitenHow to Create Pipe Development Drawings in Tekla StructuresanneacesNoch keine Bewertungen
- ANSYS IGBT Inverter Multiphysics SolutionDokument56 SeitenANSYS IGBT Inverter Multiphysics Solution黃宋儒100% (1)
- 2020 - WOST - Optics - Workshop - Stephanie KunathDokument61 Seiten2020 - WOST - Optics - Workshop - Stephanie KunathPedro JuradoNoch keine Bewertungen
- Rotordynamics Analysis Using Abaqus/StandardDokument5 SeitenRotordynamics Analysis Using Abaqus/Standardsüleyman tazebayNoch keine Bewertungen
- 19 COMNE MSC Abaqus Marc PerformanceComparisonDokument8 Seiten19 COMNE MSC Abaqus Marc PerformanceComparisonvaskomaneNoch keine Bewertungen
- Analysis of Hydraulic Stuctures in AnsysDokument29 SeitenAnalysis of Hydraulic Stuctures in AnsysAdil Javed Chaudhary100% (2)
- DVS1612 Stress Interaction PDFDokument2 SeitenDVS1612 Stress Interaction PDFJyunNoch keine Bewertungen
- Coupling ANSYS Workbench With ModeFRONTIERDokument10 SeitenCoupling ANSYS Workbench With ModeFRONTIERkristeen780% (1)
- Proceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987Von EverandProceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987W. R. TysonNoch keine Bewertungen
- NCodeDL Intro 17.0 L01 Lecture Slides Fatigue IntroductionDokument28 SeitenNCodeDL Intro 17.0 L01 Lecture Slides Fatigue IntroductionscdfNoch keine Bewertungen
- 06 NGubeljakDokument6 Seiten06 NGubeljakvahid_shoeibiNoch keine Bewertungen
- Optistruct Nonlinear 99Dokument41 SeitenOptistruct Nonlinear 99mageshwaranNoch keine Bewertungen
- Pablo Castillo R PDFDokument127 SeitenPablo Castillo R PDFkhazarhayatNoch keine Bewertungen
- CAEA v15 ANSYS Composite DamageDokument24 SeitenCAEA v15 ANSYS Composite DamageDavid MartinsNoch keine Bewertungen
- ACT - Piezo & MEMS Extension - Lecture PDFDokument185 SeitenACT - Piezo & MEMS Extension - Lecture PDFMiguel Panesso50% (2)
- MeshingDokument28 SeitenMeshingrefeiNoch keine Bewertungen
- Abaqus Adaptive MeshingDokument13 SeitenAbaqus Adaptive MeshingpaivensolidsnakeNoch keine Bewertungen
- FatigueDurability India 2019 Brochure - Document DistributionDokument8 SeitenFatigueDurability India 2019 Brochure - Document DistributionSrashmiNoch keine Bewertungen
- Intro To ANSYS NCode DL 14 5 L03 WB DL IntegrationDokument15 SeitenIntro To ANSYS NCode DL 14 5 L03 WB DL IntegrationORVILLE ACADEMYNoch keine Bewertungen
- Alloy CuCr1ZrDokument53 SeitenAlloy CuCr1ZrPrashant PuriNoch keine Bewertungen
- ICEF 2020 Keynote Prith BanerjeeDokument23 SeitenICEF 2020 Keynote Prith BanerjeeSai Santhosh ManepallyNoch keine Bewertungen
- Autodyn Composite ModelingDokument66 SeitenAutodyn Composite Modelingratko88Noch keine Bewertungen
- CPRI - EMI - EMC Test Facility, BangaloreDokument3 SeitenCPRI - EMI - EMC Test Facility, Bangaloresaidhana79Noch keine Bewertungen
- 07 MeshDokument35 Seiten07 MeshIjaz FazilNoch keine Bewertungen
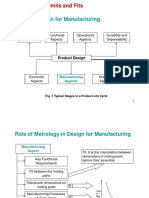
- Fundamentals of Limits and Fits DesignDokument30 SeitenFundamentals of Limits and Fits DesignSrikanth SrikeeNoch keine Bewertungen
- NipoflangeDokument13 SeitenNipoflangeAchraf BoudayaNoch keine Bewertungen
- Fluent-Intro 14.5 WS05 Electronics Cooling Plus EKMDokument48 SeitenFluent-Intro 14.5 WS05 Electronics Cooling Plus EKMMehmet ŞanlıtürkNoch keine Bewertungen
- Ansys Electronics 18Dokument3 SeitenAnsys Electronics 18William MontalvoNoch keine Bewertungen
- Mesh Tie Constraints OverviewDokument20 SeitenMesh Tie Constraints OverviewDavid Rivadeneira100% (1)
- Finite Element Simulation of A Detachable Wing Box in Composite Materials For Small AircraftDokument16 SeitenFinite Element Simulation of A Detachable Wing Box in Composite Materials For Small AircraftIsaías Chamorro CruzNoch keine Bewertungen
- Strength Curves For Metal Plates in CompressionDokument36 SeitenStrength Curves For Metal Plates in Compressionlcm327Noch keine Bewertungen
- ANSYS - OPTICAL SOLUTIONS Brochure (V4)Dokument2 SeitenANSYS - OPTICAL SOLUTIONS Brochure (V4)ssvivekanandhNoch keine Bewertungen
- BSN 17.0 M02Dokument35 SeitenBSN 17.0 M02CheyenneNoch keine Bewertungen
- Is.10716.2.1999 Es ISO 2162-2Dokument14 SeitenIs.10716.2.1999 Es ISO 2162-2Oscar AsistiriNoch keine Bewertungen
- Vibration Monitoring On Power TransformerDokument2 SeitenVibration Monitoring On Power TransformerPriya Surya HarijantoNoch keine Bewertungen
- Mech LND 2019r2 en Le07Dokument67 SeitenMech LND 2019r2 en Le07khuschandraNoch keine Bewertungen
- As 60068.2.21-2004 Environmental Testing Tests - Test U - Robustness of Terminations and Integral Mounting DevDokument8 SeitenAs 60068.2.21-2004 Environmental Testing Tests - Test U - Robustness of Terminations and Integral Mounting DevSAI Global - APACNoch keine Bewertungen
- Maxwell Intro 17.0 SP WS7.1 Workshop Instructions PMSM ExampleDokument26 SeitenMaxwell Intro 17.0 SP WS7.1 Workshop Instructions PMSM Examplezhang881907Noch keine Bewertungen
- Mech LND 17.0 M02 DampingDokument25 SeitenMech LND 17.0 M02 DampingKubilayNoch keine Bewertungen
- EMC Directive 2014 - 30 PDFDokument36 SeitenEMC Directive 2014 - 30 PDFJoannes Lenny EstibeiroNoch keine Bewertungen
- ANSYS Mechanical Basic Structural NonlinearitiesDokument41 SeitenANSYS Mechanical Basic Structural NonlinearitiesalexNoch keine Bewertungen
- Supporting in Engineering Validating/Justifying Solution Against EasingDokument4 SeitenSupporting in Engineering Validating/Justifying Solution Against EasingahmedaliyuNoch keine Bewertungen
- Intro Expl Dyn 17.0 M06 Explicit Dynamics Analysis Settings and ParametersDokument48 SeitenIntro Expl Dyn 17.0 M06 Explicit Dynamics Analysis Settings and ParametersN.g. Nagaraj100% (1)
- Parker Electronics Update 160316 PDFDokument71 SeitenParker Electronics Update 160316 PDFMaria Lavinia IordacheNoch keine Bewertungen
- As 60068.2.64-2003 Environmental Testing Tests - Test FH - Vibration Broad-Band Random (Digital Control) and GDokument10 SeitenAs 60068.2.64-2003 Environmental Testing Tests - Test FH - Vibration Broad-Band Random (Digital Control) and GSAI Global - APACNoch keine Bewertungen
- ILNAS-EN 10028-1:2017: Flat Products Made of Steels For Pressure Purposes - Part 1: General RequirementsDokument8 SeitenILNAS-EN 10028-1:2017: Flat Products Made of Steels For Pressure Purposes - Part 1: General RequirementsANoch keine Bewertungen
- EM 01 Haedrich Electromechanical Update Ansys Acum Wien 20150429 1Dokument61 SeitenEM 01 Haedrich Electromechanical Update Ansys Acum Wien 20150429 1mohamedezeldinNoch keine Bewertungen
- Code Aster Capabilities PDFDokument36 SeitenCode Aster Capabilities PDFsb1966Noch keine Bewertungen
- Electric Machines Considering Power ElectronicsDokument68 SeitenElectric Machines Considering Power ElectronicsAnkit DalalNoch keine Bewertungen
- ASTM A 109-A 109M Standard Specification For Steel, Strip, Carbon (0.25 Maximum Percent), Cold-Rolled Current 2003-09-10Dokument9 SeitenASTM A 109-A 109M Standard Specification For Steel, Strip, Carbon (0.25 Maximum Percent), Cold-Rolled Current 2003-09-10Enmel Martínez BejaranoNoch keine Bewertungen
- End Winding CharacterizationDokument138 SeitenEnd Winding CharacterizationEnmel Martínez BejaranoNoch keine Bewertungen
- Generator Protection GuideDokument71 SeitenGenerator Protection GuideWrya Saeed100% (1)
- Synchronous MotorDokument146 SeitenSynchronous MotorMirela PatrascuNoch keine Bewertungen
- 02 Basic 3D MagnetostaticTutorialDokument102 Seiten02 Basic 3D MagnetostaticTutorialEnmel Martínez BejaranoNoch keine Bewertungen
- 02 Basic 3D 1steps GeometryMeshTutorialDokument202 Seiten02 Basic 3D 1steps GeometryMeshTutorialEnmel Martínez BejaranoNoch keine Bewertungen
- Synchronous MotorDokument146 SeitenSynchronous MotorMirela PatrascuNoch keine Bewertungen
- Ieee 810Dokument24 SeitenIeee 810Enmel Martínez Bejarano100% (1)
- Vibro Acoustic Analysis With Flux and Opti Struct FINALDokument31 SeitenVibro Acoustic Analysis With Flux and Opti Struct FINALEnmel Martínez BejaranoNoch keine Bewertungen
- CAD Package For Electromagnetic and Thermal Analysis Using Finite ElementsDokument178 SeitenCAD Package For Electromagnetic and Thermal Analysis Using Finite ElementsEnmel Martínez BejaranoNoch keine Bewertungen
- CAD Package For Electromagnetic and Thermal Analysis Using Finite ElementsDokument62 SeitenCAD Package For Electromagnetic and Thermal Analysis Using Finite ElementsEnmel Martínez BejaranoNoch keine Bewertungen
- LICDokument5 SeitenLICSandesh RSNoch keine Bewertungen
- Computer AHS 1 (150) - 1Dokument6 SeitenComputer AHS 1 (150) - 1Ahmad KhanNoch keine Bewertungen
- Vacon NX Products For Common DC Bus SystemsDokument20 SeitenVacon NX Products For Common DC Bus SystemsSilvian IonescuNoch keine Bewertungen
- Interruptor Digital Schneider Ihp PDFDokument2 SeitenInterruptor Digital Schneider Ihp PDFMiguel MontalvánNoch keine Bewertungen
- W8 Local Area Network and Wide Area Network - ModuleDokument6 SeitenW8 Local Area Network and Wide Area Network - ModuleClash ClanNoch keine Bewertungen
- Awgn ChannelDokument19 SeitenAwgn ChannelAnkit KumarNoch keine Bewertungen
- LV PH 2020 - Electrical Material 05182020Dokument36 SeitenLV PH 2020 - Electrical Material 05182020art cafeNoch keine Bewertungen
- Datasheet PDFDokument3 SeitenDatasheet PDFpichon1Noch keine Bewertungen
- Smart Antenna System OverviewDokument15 SeitenSmart Antenna System OverviewGR Techno SolutionsNoch keine Bewertungen
- Pruef Messtechnik en PDFDokument40 SeitenPruef Messtechnik en PDFFCO ANTONIO CHACONNoch keine Bewertungen
- 2017 LGInnotek CCTV Catg ENG 0406-2Dokument28 Seiten2017 LGInnotek CCTV Catg ENG 0406-2JamalSultanNoch keine Bewertungen
- DVP-ES2 Series PLC Electrical Specifications GuideDokument19 SeitenDVP-ES2 Series PLC Electrical Specifications Guidetoanck86Noch keine Bewertungen
- WWW - Manaresults.Co - In: Answer Any FIVE Questions All Questions Carry Equal MarksDokument2 SeitenWWW - Manaresults.Co - In: Answer Any FIVE Questions All Questions Carry Equal MarkssatyaNoch keine Bewertungen
- CQY80N/ CQY80NG: Optocoupler, Phototransistor Output, With Base ConnectionDokument11 SeitenCQY80N/ CQY80NG: Optocoupler, Phototransistor Output, With Base ConnectionAbdelwhab ElsaftyNoch keine Bewertungen
- Flyer - ibaPADU 8 HI I - EN PDFDokument2 SeitenFlyer - ibaPADU 8 HI I - EN PDFc.a.g.p.Noch keine Bewertungen
- Ethos Overdrive Amp Spec Sheet RevBDokument2 SeitenEthos Overdrive Amp Spec Sheet RevBmikletNoch keine Bewertungen
- VLSI Syllabus 2013-14Dokument43 SeitenVLSI Syllabus 2013-14Eric DharanNoch keine Bewertungen
- 1 KW Traction Controller Reference Design For 3-Phase BLDC Motors For Light Electric VehiclesDokument7 Seiten1 KW Traction Controller Reference Design For 3-Phase BLDC Motors For Light Electric VehiclesAhmar Hayat KhanNoch keine Bewertungen
- Manual 3com SuperStack II 3000 TXDokument144 SeitenManual 3com SuperStack II 3000 TXnerdopNoch keine Bewertungen
- CT's and PT's - Learn MeteringDokument3 SeitenCT's and PT's - Learn MeteringDGGNoch keine Bewertungen
- ODA-150 Towards A More Generic Slice Template GST - 5GROTS CatalystDokument19 SeitenODA-150 Towards A More Generic Slice Template GST - 5GROTS CatalystAndrea StefanelliNoch keine Bewertungen
- Chapter 04 Processors and Memory Hierarchy PDFDokument50 SeitenChapter 04 Processors and Memory Hierarchy PDFgayathriNoch keine Bewertungen
- Friendly Introduction To Analysis 2nd Edition Kosmala Solutions Manual - CompressDokument104 SeitenFriendly Introduction To Analysis 2nd Edition Kosmala Solutions Manual - CompressHYTHAMNoch keine Bewertungen
- Programmable Logic Controllers ManualDokument171 SeitenProgrammable Logic Controllers Manualfarhan usmanNoch keine Bewertungen
- Standard CoaxDokument25 SeitenStandard CoaxkylegazeNoch keine Bewertungen
- TESTRANO 600 User Manual ENU PDFDokument277 SeitenTESTRANO 600 User Manual ENU PDFBala Krishnan100% (4)
- Pub Logic-Design PDFDokument309 SeitenPub Logic-Design PDFAlex SoulchildNoch keine Bewertungen
- 3HH-00057-2286-DFZZA-01P01-R4202 CFT Workshop BondingDokument10 Seiten3HH-00057-2286-DFZZA-01P01-R4202 CFT Workshop BondingStavros SotiriadisNoch keine Bewertungen
- 832 Series ManualDokument10 Seiten832 Series ManualBECHER CAPCHANoch keine Bewertungen
- Track Busway Plug in Units - Domestic 6Dokument68 SeitenTrack Busway Plug in Units - Domestic 6TBS Máy Phát ĐiệnNoch keine Bewertungen