Das könnte Ihnen auch gefallen
- 03 Lyapunov PDFDokument15 Seiten03 Lyapunov PDFHill HermitNoch keine Bewertungen
- Dynamical Systems 3Dokument19 SeitenDynamical Systems 3Giozy OradeaNoch keine Bewertungen
- Lecture 6Dokument18 SeitenLecture 6AlirezaNoch keine Bewertungen
- Lyapunov Stability Theorems: Definition 1 (Positive Definite Functions)Dokument21 SeitenLyapunov Stability Theorems: Definition 1 (Positive Definite Functions)Jason ChiangNoch keine Bewertungen
- 1 Lyapunov Stability TheoryDokument11 Seiten1 Lyapunov Stability TheoryajmaltkNoch keine Bewertungen
- 07-Lyapunov Stability TheoryDokument11 Seiten07-Lyapunov Stability TheoryNiyo MosesNoch keine Bewertungen
- Lecture 4 Chapter 4 Lyapunov StabilityDokument86 SeitenLecture 4 Chapter 4 Lyapunov StabilitysalimNoch keine Bewertungen
- Lyapunov Stability Theory:: Problem of Motion Stability, Includes Two Methods For Stability Analysis (The SoDokument25 SeitenLyapunov Stability Theory:: Problem of Motion Stability, Includes Two Methods For Stability Analysis (The SoSantiago Garrido BullónNoch keine Bewertungen
- L LyapunovDokument52 SeitenL Lyapunovkazem mokhtariNoch keine Bewertungen
- 2 Lyapunov StabilityDokument6 Seiten2 Lyapunov StabilityGrecia GarciaNoch keine Bewertungen
- EE3302Dokument4 SeitenEE3302Alok KumarNoch keine Bewertungen
- Lyapunov Stability Theory: CY4A2: Advanced Nonlinear ControlDokument16 SeitenLyapunov Stability Theory: CY4A2: Advanced Nonlinear ControlGözde YetkinNoch keine Bewertungen
- Lecture 7: Lyapunov Stability of Nonlinear Systems: ConceptsDokument13 SeitenLecture 7: Lyapunov Stability of Nonlinear Systems: ConceptsEverly NNoch keine Bewertungen
- Nonlinear Control Lecture # 2 Stability of Equilibrium PointsDokument36 SeitenNonlinear Control Lecture # 2 Stability of Equilibrium PointsFawaz PartoNoch keine Bewertungen
- EN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 3, 2020Dokument12 SeitenEN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 3, 2020SAYED JAVED ALI SHAHNoch keine Bewertungen
- A Review of Fundamentals of Lyapunov TheoryDokument8 SeitenA Review of Fundamentals of Lyapunov TheoryNanthanNoch keine Bewertungen
- Lecture 4 PDFDokument22 SeitenLecture 4 PDFSparrowGospleGilbertNoch keine Bewertungen
- Gradient SystemsDokument5 SeitenGradient SystemsAlexandre MazetNoch keine Bewertungen
- CDS270-I Lecture2Dokument13 SeitenCDS270-I Lecture2sab238633Noch keine Bewertungen
- Nonlinear Systems: Phase Plane AnalysisDokument33 SeitenNonlinear Systems: Phase Plane AnalysisgiacomoNoch keine Bewertungen
- Material: Glad & Ljung Ch. 12.2 Khalil Ch. 4.1-4.3 Lecture NotesDokument42 SeitenMaterial: Glad & Ljung Ch. 12.2 Khalil Ch. 4.1-4.3 Lecture NotesArun JerardNoch keine Bewertungen
- Nonlinear Control Theory: Introduction To Dynamical SystemsDokument43 SeitenNonlinear Control Theory: Introduction To Dynamical SystemsChernet TugeNoch keine Bewertungen
- 6 Stability AnalysisDokument35 Seiten6 Stability Analysismass1984Noch keine Bewertungen
- One Dimensional FlowsDokument19 SeitenOne Dimensional FlowsBhawan NarineNoch keine Bewertungen
- Lyapunov StabilityDokument9 SeitenLyapunov StabilitylvrevathiNoch keine Bewertungen
- Ds 5Dokument26 SeitenDs 5Giozy OradeaNoch keine Bewertungen
- Lecture 5 PDFDokument35 SeitenLecture 5 PDFLucecitho CriNoch keine Bewertungen
- LyapunovDokument9 SeitenLyapunovborbu-jasNoch keine Bewertungen
- Lecture - 03 Stability of Equilibrium PointsDokument35 SeitenLecture - 03 Stability of Equilibrium PointsakozyNoch keine Bewertungen
- Nonlinear Control Lecture # 6 Stability of Equilibrium PointsDokument20 SeitenNonlinear Control Lecture # 6 Stability of Equilibrium PointsmaryamNoch keine Bewertungen
- Feedback LinearizationDokument47 SeitenFeedback LinearizationPTR77Noch keine Bewertungen
- Lect 10Dokument22 SeitenLect 10maryamNoch keine Bewertungen
- Math 677. Fall 2009. Homework #5 SolutionsDokument2 SeitenMath 677. Fall 2009. Homework #5 SolutionsRodrigo KostaNoch keine Bewertungen
- Nonlinear Control and Servo Systems (FRTN05)Dokument9 SeitenNonlinear Control and Servo Systems (FRTN05)Abdesselem BoulkrouneNoch keine Bewertungen
- Midterm NewDokument2 SeitenMidterm NewahadmirNoch keine Bewertungen
- 2 Lyapunov Direct MethodDokument39 Seiten2 Lyapunov Direct Methodbluefantasy604Noch keine Bewertungen
- Binder 1Dokument8 SeitenBinder 1Devilman_2Noch keine Bewertungen
- C21 Nonlinear Systems: Linearization and Lyapunov's Direct MethodDokument11 SeitenC21 Nonlinear Systems: Linearization and Lyapunov's Direct MethodSindhu VelayudhamNoch keine Bewertungen
- Feedback Linearisation: N N N N N NDokument22 SeitenFeedback Linearisation: N N N N N NJason ChiangNoch keine Bewertungen
- Non Linear Periodic Solution (Limit Cycle) PDFDokument18 SeitenNon Linear Periodic Solution (Limit Cycle) PDFanuj kumarNoch keine Bewertungen
- Periodic Solutions: Lesson ObjectivesDokument18 SeitenPeriodic Solutions: Lesson ObjectivestanmayeeNoch keine Bewertungen
- F X DT D: 1) Krasovskii's TheoremDokument51 SeitenF X DT D: 1) Krasovskii's Theoremvenkat rajNoch keine Bewertungen
- Mathematical PreliminariesDokument14 SeitenMathematical PreliminariesSanchez Resendiz BonifacioNoch keine Bewertungen
- Feedback Linearization: Peter Al Hokayem and Eduardo Gallestey May 14, 2015Dokument14 SeitenFeedback Linearization: Peter Al Hokayem and Eduardo Gallestey May 14, 2015abhilash v nairNoch keine Bewertungen
- Working Instructions: EoutputDokument16 SeitenWorking Instructions: EoutputAshwin MahoneyNoch keine Bewertungen
- 3: Divide and Conquer: Fourier Transform: PolynomialDokument8 Seiten3: Divide and Conquer: Fourier Transform: PolynomialIrmak ErkolNoch keine Bewertungen
- 3: Divide and Conquer: Fourier Transform: PolynomialDokument8 Seiten3: Divide and Conquer: Fourier Transform: PolynomialCajun SefNoch keine Bewertungen
- L32 Statistical ComputationDokument29 SeitenL32 Statistical ComputationSumit MishraNoch keine Bewertungen
- Balanced TruncationDokument15 SeitenBalanced TruncationVineet KoundalNoch keine Bewertungen
- Ds 6Dokument10 SeitenDs 6Giozy OradeaNoch keine Bewertungen
- Chapter1 Nonlinear Systems TempDokument8 SeitenChapter1 Nonlinear Systems TempahmedNoch keine Bewertungen
- ESE 500 Homework3 PDFDokument4 SeitenESE 500 Homework3 PDFforante3Noch keine Bewertungen
- Sys SolDokument9 SeitenSys SolNANA NANANoch keine Bewertungen
- I. Lyapunov Theorem For Stability AnalysisDokument2 SeitenI. Lyapunov Theorem For Stability AnalysisMarco NeveNoch keine Bewertungen
- Chapter 3-2857Dokument8 SeitenChapter 3-2857Kevin FontynNoch keine Bewertungen
- Adaptive Control Design and AnalysisDokument45 SeitenAdaptive Control Design and Analysishind90Noch keine Bewertungen
- Nonlinear Control Problem Set1Dokument3 SeitenNonlinear Control Problem Set1tetrixNoch keine Bewertungen
- Lecture 1Dokument2 SeitenLecture 1jef22Noch keine Bewertungen
- Problems and SolutionsDokument13 SeitenProblems and SolutionsJason ChiangNoch keine Bewertungen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- Calculation of Effective EMI in Gulmohar Gardens: at The Time of Possession 2Bhk (1010 SQFT) 2Bhk + Study (1325 SQFT)Dokument1 SeiteCalculation of Effective EMI in Gulmohar Gardens: at The Time of Possession 2Bhk (1010 SQFT) 2Bhk + Study (1325 SQFT)सुमित नेमाNoch keine Bewertungen
- 1530188962Dokument20 Seiten1530188962सुमित नेमाNoch keine Bewertungen
- Electrical Machines: EE100 Basics of Electrical EngineeringDokument19 SeitenElectrical Machines: EE100 Basics of Electrical Engineeringसुमित नेमाNoch keine Bewertungen
- Rectangular Coordinates: How To Convert Rectangular Coordinates To Polar Coordinates, and Vice-VersaDokument5 SeitenRectangular Coordinates: How To Convert Rectangular Coordinates To Polar Coordinates, and Vice-Versaसुमित नेमाNoch keine Bewertungen
- Problems AC CircuitDokument8 SeitenProblems AC Circuitसुमित नेमाNoch keine Bewertungen
- Ee 332Dokument2 SeitenEe 332सुमित नेमाNoch keine Bewertungen
- Introduction To Frequency Domain ProcessingDokument55 SeitenIntroduction To Frequency Domain Processingसुमित नेमाNoch keine Bewertungen
- The 6 Simple Machines1111Dokument27 SeitenThe 6 Simple Machines1111सुमित नेमाNoch keine Bewertungen
- ETR3C4Dokument2 SeitenETR3C4सुमित नेमाNoch keine Bewertungen
- Cover PageDokument1 SeiteCover Pageसुमित नेमाNoch keine Bewertungen
- The 'Hidden' Pay GapDokument1 SeiteThe 'Hidden' Pay Gapसुमित नेमाNoch keine Bewertungen
- The Times of India, New Delhi Wednesday, March 8, 2017Dokument1 SeiteThe Times of India, New Delhi Wednesday, March 8, 2017सुमित नेमाNoch keine Bewertungen
- Online ADV MT 06 08 2013 PDFDokument11 SeitenOnline ADV MT 06 08 2013 PDFSambit PatraNoch keine Bewertungen
- 14 - List of WorksDokument170 Seiten14 - List of Worksसुमित नेमाNoch keine Bewertungen
- Notice 8122016 PDFDokument1 SeiteNotice 8122016 PDFसुमित नेमाNoch keine Bewertungen
- Advertisement For Faculty Recruitment OctDokument1 SeiteAdvertisement For Faculty Recruitment Octसुमित नेमाNoch keine Bewertungen
- B003Dokument6 SeitenB003सुमित नेमाNoch keine Bewertungen
- DQ TransformationDokument51 SeitenDQ Transformationसुमित नेमा50% (2)
- Medical Hypotheses: Enrico Facco, Christian Agrillo, Bruce GreysonDokument9 SeitenMedical Hypotheses: Enrico Facco, Christian Agrillo, Bruce GreysonFranciscoCánovasGarcíaNoch keine Bewertungen
- (New Directions in Philosophy and Cognitive Science) Shaun Gallagher, Lauren Reinerman-Jones, Bruce Janz, Patricia Bockelman, Jörg Trempler (auth.)-A Neurophenomenology of Awe and Wonder_ Towards a No.pdfDokument205 Seiten(New Directions in Philosophy and Cognitive Science) Shaun Gallagher, Lauren Reinerman-Jones, Bruce Janz, Patricia Bockelman, Jörg Trempler (auth.)-A Neurophenomenology of Awe and Wonder_ Towards a No.pdfAsef Antonio100% (1)
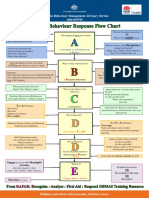
- Behaviour Response Flow Chart 5 Nov 2012Dokument1 SeiteBehaviour Response Flow Chart 5 Nov 2012jakilaNoch keine Bewertungen
- Communicative Behaviour of A Language Learner - Exploring Willingness To CommunicateDokument179 SeitenCommunicative Behaviour of A Language Learner - Exploring Willingness To CommunicateManuela SilvaNoch keine Bewertungen
- EE462 Design of Digital Control Systems PDFDokument2 SeitenEE462 Design of Digital Control Systems PDFArya RahulNoch keine Bewertungen
- Organizational CultureDokument15 SeitenOrganizational Culturetuffy0234Noch keine Bewertungen
- Kelly's Personality TheoryDokument14 SeitenKelly's Personality TheorymhahmadiNoch keine Bewertungen
- Van SeatingDokument8 SeitenVan SeatingPV LeeNoch keine Bewertungen
- Lewin's Force Field Analysis ModelDokument28 SeitenLewin's Force Field Analysis ModelDeewakar NayyarNoch keine Bewertungen
- Answer Key Unit 6Dokument2 SeitenAnswer Key Unit 6Mohd Syazwan ArifNoch keine Bewertungen
- Leisure Education GameDokument3 SeitenLeisure Education Gameapi-376943692Noch keine Bewertungen
- Future Self Journal 2020 PDFDokument9 SeitenFuture Self Journal 2020 PDFAdriana DavidNoch keine Bewertungen
- Leadership and Motivation: © 2004 by Nelson, A Division of Thomson Canada LimitedDokument25 SeitenLeadership and Motivation: © 2004 by Nelson, A Division of Thomson Canada LimiteddurgamadhabaNoch keine Bewertungen
- Students With Emotional and Behavioral Disorders Written ReportDokument12 SeitenStudents With Emotional and Behavioral Disorders Written Reportricz11450% (2)
- Interview Questions Ans. TemplateDokument3 SeitenInterview Questions Ans. TemplateSimran SinghNoch keine Bewertungen
- IQ and EQDokument7 SeitenIQ and EQAaron Joshua C-CenizaNoch keine Bewertungen
- Mandela LeadershipDokument5 SeitenMandela LeadershipDerly ObtialNoch keine Bewertungen
- Behaviorist Vs CognitiveDokument5 SeitenBehaviorist Vs CognitiveZainab0980% (5)
- Lesson 1 IntroductionDokument13 SeitenLesson 1 IntroductionOkkinNoissac100% (1)
- Second Language Acquisition TheoryDokument32 SeitenSecond Language Acquisition Theoryjavier_meaNoch keine Bewertungen
- Dynamic Systems Approach DevelopDokument2 SeitenDynamic Systems Approach DevelopBlagojeNoch keine Bewertungen
- 15 F Q Plus Extended ReportDokument20 Seiten15 F Q Plus Extended ReportPrashanth KumarNoch keine Bewertungen
- Values Orientation WorkshopDokument32 SeitenValues Orientation WorkshopJelaiZapanta82% (11)
- Behavior Therapy SlidesDokument33 SeitenBehavior Therapy SlidesSeenu XavierNoch keine Bewertungen
- Covarrubias 2017Dokument4 SeitenCovarrubias 2017NICOLÁS ANDRÉS AYELEF PARRAGUEZNoch keine Bewertungen
- Ruth G. Millikan - Philosophy DepartmentDokument3 SeitenRuth G. Millikan - Philosophy DepartmenturliaNoch keine Bewertungen
- Organizational Behavior Chapter 6 MotivationDokument3 SeitenOrganizational Behavior Chapter 6 MotivationAhmadhHussain0% (1)
- Soul Theory of The BuddhistsDokument62 SeitenSoul Theory of The BuddhistsAadad100% (1)
- CH 1 OBDokument21 SeitenCH 1 OBMuhammadUmairNoch keine Bewertungen
- Organisational Behaviour Personal Learning Paper - 2Dokument4 SeitenOrganisational Behaviour Personal Learning Paper - 2Vikram FalorNoch keine Bewertungen