Das könnte Ihnen auch gefallen
- Lecture 07: PARTITIONING: Prof. Indranil SenguptaDokument143 SeitenLecture 07: PARTITIONING: Prof. Indranil SenguptaAkhendra KumarNoch keine Bewertungen
- Week 3 Lecture Material Isg PDFDokument105 SeitenWeek 3 Lecture Material Isg PDFAkhendra KumarNoch keine Bewertungen
- Lec 10 Combinational Logic CircuitsDokument59 SeitenLec 10 Combinational Logic CircuitsNaim UddinNoch keine Bewertungen
- Gaussian Random Number Generator Using Boxmuller MethodDokument27 SeitenGaussian Random Number Generator Using Boxmuller MethodAbhijeet Singh KatiyarNoch keine Bewertungen
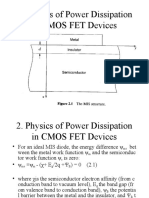
- Physics of Power Dissipation in CMOS FET DevicesDokument70 SeitenPhysics of Power Dissipation in CMOS FET DevicesPunith Gowda M BNoch keine Bewertungen
- Digital Integrated Circuits: A Design PerspectiveDokument113 SeitenDigital Integrated Circuits: A Design Perspectiveapi-127299018Noch keine Bewertungen
- Level 54 Bsim4Dokument13 SeitenLevel 54 Bsim4Georgios SarrisNoch keine Bewertungen
- Selected Design Topics: Logic and Computer Design FundamentalsDokument15 SeitenSelected Design Topics: Logic and Computer Design FundamentalsYawar Abbas KhanNoch keine Bewertungen
- Lecture21 dr1Dokument31 SeitenLecture21 dr1api-3834272Noch keine Bewertungen
- Unit 5 - A CASE STUDY - Using Pic MicrocontrollerDokument33 SeitenUnit 5 - A CASE STUDY - Using Pic MicrocontrollerPoonthalirNoch keine Bewertungen
- VLSI Design Question BankDokument10 SeitenVLSI Design Question Bankbooks babuNoch keine Bewertungen
- Lecture18 GRDokument36 SeitenLecture18 GRapi-3834272Noch keine Bewertungen
- N WellDokument21 SeitenN WellSanthanu SurendranNoch keine Bewertungen
- Design of Sense Amplifier For Coupling Suppression by UsingDokument28 SeitenDesign of Sense Amplifier For Coupling Suppression by UsingSai KumarNoch keine Bewertungen
- Lec14 DTMOSDokument88 SeitenLec14 DTMOSSalim SanNoch keine Bewertungen
- Final Vls I Project ReportDokument5 SeitenFinal Vls I Project Reportgaurav_amuNoch keine Bewertungen
- Jin FinalDokument23 SeitenJin FinalrajsrinidhiNoch keine Bewertungen
- Latch Versus RegisterDokument23 SeitenLatch Versus RegisterSGSNoch keine Bewertungen
- MOS Layers: Four Basic Layers N-Diffusion P-Diffusion Polysilicon MetalDokument12 SeitenMOS Layers: Four Basic Layers N-Diffusion P-Diffusion Polysilicon MetalNivedita Shettar100% (1)
- Complex GateDokument44 SeitenComplex Gatemisbahforu09Noch keine Bewertungen
- Cmos LayoutDokument13 SeitenCmos LayoutshastryNoch keine Bewertungen
- Brunda V (1PE15EC039) Jigyasa N. Maheshwari (1PE15EC060) : Project Report Phase 1Dokument43 SeitenBrunda V (1PE15EC039) Jigyasa N. Maheshwari (1PE15EC060) : Project Report Phase 1Nikhil NikiNoch keine Bewertungen
- Vlsi ch1Dokument64 SeitenVlsi ch1Nihar ranjan AditNoch keine Bewertungen
- Sequential Circuits: Logic and Computer Design FundamentalsDokument50 SeitenSequential Circuits: Logic and Computer Design FundamentalsYawar Abbas KhanNoch keine Bewertungen
- A Memory-Based FFT Processor Design With Generalized EfficientDokument5 SeitenA Memory-Based FFT Processor Design With Generalized Efficientrajesh.v.v.kNoch keine Bewertungen
- Reviewing The Basics of Microstrip LinesDokument6 SeitenReviewing The Basics of Microstrip LinesMateus LucasNoch keine Bewertungen
- 24 LFSRDokument24 Seiten24 LFSRAbdul RajakNoch keine Bewertungen
- CMOS Process FlowDokument35 SeitenCMOS Process Flowag21937570Noch keine Bewertungen
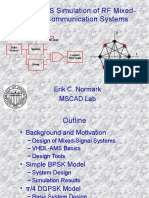
- Eric Thesis SlidesDokument43 SeitenEric Thesis SlidesHumberto JuniorNoch keine Bewertungen
- Chapter 12Dokument107 SeitenChapter 12Gautham AnebajaganeNoch keine Bewertungen
- Ec805 Wireless Sensor NetworksDokument1 SeiteEc805 Wireless Sensor NetworkscalvinosimonNoch keine Bewertungen
- Mod1VLSI TECHNOLOGY1Dokument65 SeitenMod1VLSI TECHNOLOGY1Jomon VargheseNoch keine Bewertungen
- Pres9 WDMDokument26 SeitenPres9 WDMPranveer Singh PariharNoch keine Bewertungen
- Latches&FlipflopsDokument20 SeitenLatches&FlipflopsAjay G Bellam100% (1)
- EE-323 (3+1) Topics: Instrument Types & Chapter # 3 Department of Electrical Engineering, WECDokument15 SeitenEE-323 (3+1) Topics: Instrument Types & Chapter # 3 Department of Electrical Engineering, WECAsad SaeedNoch keine Bewertungen
- Introduction To VLSI DesignDokument33 SeitenIntroduction To VLSI DesignAnonymous P9xMOgEYt1Noch keine Bewertungen
- Hspice Simulation of SRAM PDFDokument65 SeitenHspice Simulation of SRAM PDFYatheesh KaggereNoch keine Bewertungen
- DOST-ASTI Electric Manual PDFDokument17 SeitenDOST-ASTI Electric Manual PDFJB NavarroNoch keine Bewertungen
- A CMOS Bandgap Reference Circuit With Sub-1V OperationDokument5 SeitenA CMOS Bandgap Reference Circuit With Sub-1V Operationbooky_mookyNoch keine Bewertungen
- Lecture22 dr2Dokument37 SeitenLecture22 dr2api-3834272Noch keine Bewertungen
- Asynchronous Sequential CircuitsDokument168 SeitenAsynchronous Sequential CircuitsLatif KhanNoch keine Bewertungen
- CMOS Translinear CellsDokument4 SeitenCMOS Translinear CellsSumitChoudharyNoch keine Bewertungen
- Chapter SixDokument5 SeitenChapter Sixyunus memonNoch keine Bewertungen
- IP Addressing Scheme (Topic 4) : TextbookDokument37 SeitenIP Addressing Scheme (Topic 4) : TextbookMin Hein HtetNoch keine Bewertungen
- CMOS PortDokument46 SeitenCMOS PortZali100% (1)
- Single-Mask Double-Patterning Lithography: Rani S. Ghaida, George Torres, and Puneet GuptaDokument21 SeitenSingle-Mask Double-Patterning Lithography: Rani S. Ghaida, George Torres, and Puneet GuptaRenju TjNoch keine Bewertungen
- Gummen PoolDokument29 SeitenGummen PoolvanithapremkumarNoch keine Bewertungen
- Why VLSI? - Moore's Law. - The VLSI Design ProcessDokument28 SeitenWhy VLSI? - Moore's Law. - The VLSI Design Processlim hyNoch keine Bewertungen
- Faults in Digital Testing SystemsDokument30 SeitenFaults in Digital Testing SystemskumarbsnspNoch keine Bewertungen
- Layout Lec 04 Techniques v01Dokument76 SeitenLayout Lec 04 Techniques v01Ahmed MetwalyNoch keine Bewertungen
- Ion Implantation in Finfet Technology Using Tsuprem-4Dokument61 SeitenIon Implantation in Finfet Technology Using Tsuprem-4Sahil YadavNoch keine Bewertungen
- Lecture12 Placement 3Dokument51 SeitenLecture12 Placement 3api-3834272Noch keine Bewertungen
- Analog Power Management Ic Design CopecDokument535 SeitenAnalog Power Management Ic Design Copec王彦威Noch keine Bewertungen
- Chapter 10 PDFDokument26 SeitenChapter 10 PDFPugazhendhi MuthuNoch keine Bewertungen
- Systemc-Ams Tutorial: Institute of Computer Technology Vienna University of Technology Markus DammDokument26 SeitenSystemc-Ams Tutorial: Institute of Computer Technology Vienna University of Technology Markus DammAamir HabibNoch keine Bewertungen
- Unit 13: Chapter 3 - Combinational Logic DesignDokument40 SeitenUnit 13: Chapter 3 - Combinational Logic DesignVani YamaniNoch keine Bewertungen
- Lesson 11 DC Transient AnalysisDokument81 SeitenLesson 11 DC Transient AnalysisJoshua JapitanNoch keine Bewertungen
- Problem Formulation: Clock Network SynthesisDokument40 SeitenProblem Formulation: Clock Network Synthesisraghava06Noch keine Bewertungen
- Lecture24 Clock Power RoutingDokument30 SeitenLecture24 Clock Power Routingapi-3834272100% (1)
- 13 Misc RoutingDokument37 Seiten13 Misc RoutingRoshan RajuNoch keine Bewertungen
- TEST - 4 (SUBJECT WISE) 23-Feb-20 16 - 53Dokument54 SeitenTEST - 4 (SUBJECT WISE) 23-Feb-20 16 - 53Anupam DasNoch keine Bewertungen
- TEST - 8 (SUBJECT WISE) 07-Mar-20 17 - 42Dokument65 SeitenTEST - 8 (SUBJECT WISE) 07-Mar-20 17 - 42Anupam DasNoch keine Bewertungen
- TEST - 13 (SUBJECT WISE) 10-Apr-20 12 - 26Dokument65 SeitenTEST - 13 (SUBJECT WISE) 10-Apr-20 12 - 26Anupam DasNoch keine Bewertungen
- TEST - 5 (SUBJECT WISE) 28-Mar-20 19 - 13Dokument59 SeitenTEST - 5 (SUBJECT WISE) 28-Mar-20 19 - 13Anupam DasNoch keine Bewertungen
- Expense TrackerDokument18 SeitenExpense TrackerAnupam DasNoch keine Bewertungen
- NIMHANS - Welfare Benefits For Persons With Psychiatric Disability English Sep 2016Dokument2 SeitenNIMHANS - Welfare Benefits For Persons With Psychiatric Disability English Sep 2016Anupam DasNoch keine Bewertungen
- A New Methodology The Design of Asynchronous Digital CircuitsDokument6 SeitenA New Methodology The Design of Asynchronous Digital CircuitsAnupam DasNoch keine Bewertungen
- Experiment - 5 Load Flow Analysis Using Power World SimulatorDokument1 SeiteExperiment - 5 Load Flow Analysis Using Power World SimulatorAnupam DasNoch keine Bewertungen
- Side-Channel Power Analysis of A GPU AES Implementation: Chao Luo, Yunsi Fei, Pei Luo, Saoni Mukherjee, David KaeliDokument8 SeitenSide-Channel Power Analysis of A GPU AES Implementation: Chao Luo, Yunsi Fei, Pei Luo, Saoni Mukherjee, David KaeliAnupam DasNoch keine Bewertungen
- Flexible, Cost-Efficient, High-Throughput Architecture For Layered LDPC Decoders With Fully-Parallel Processing UnitsDokument8 SeitenFlexible, Cost-Efficient, High-Throughput Architecture For Layered LDPC Decoders With Fully-Parallel Processing UnitsAnupam DasNoch keine Bewertungen
- Writing Statement of PurposeDokument1 SeiteWriting Statement of PurposeHaseeb BalochNoch keine Bewertungen
- SCRA 2015 CutoffDokument1 SeiteSCRA 2015 CutoffAnupam DasNoch keine Bewertungen
- KV FormDokument1 SeiteKV FormAnupam DasNoch keine Bewertungen
- First Stage Registration FormDokument1 SeiteFirst Stage Registration FormAnupam DasNoch keine Bewertungen
- Firstyear NamelistDokument27 SeitenFirstyear NamelistAnupam DasNoch keine Bewertungen
- Single Phase Three Leg Ac/ac ConverterDokument8 SeitenSingle Phase Three Leg Ac/ac ConvertermycatalystsNoch keine Bewertungen
- MN04020003EDokument204 SeitenMN04020003EElderJoaoNoch keine Bewertungen
- Opamp Applications: Session 10: Prakash Biswagar Asst. Professor E&C Engg. Dept RV College of Engineering, BangaloreDokument35 SeitenOpamp Applications: Session 10: Prakash Biswagar Asst. Professor E&C Engg. Dept RV College of Engineering, BangaloreSatya Prasad AkkinaNoch keine Bewertungen
- A7800 PDFDokument9 SeitenA7800 PDFkarkonNoch keine Bewertungen
- Ug1414 Vitis AiDokument157 SeitenUg1414 Vitis AipawelmmNoch keine Bewertungen
- T.eme380.61X Maintenance ManualDokument12 SeitenT.eme380.61X Maintenance ManualAnonymous XoW23y58ONoch keine Bewertungen
- IEC 60027 2 SymbolsDokument6 SeitenIEC 60027 2 SymbolsĐức Huấn Đỗ0% (1)
- KBPC5000 - KBPC5010: Silicon Bridge Rectifiers BR50-MDokument2 SeitenKBPC5000 - KBPC5010: Silicon Bridge Rectifiers BR50-Mjohany yoveraNoch keine Bewertungen
- GE MAC-5000 - Service Manual PDFDokument158 SeitenGE MAC-5000 - Service Manual PDFGregoryLozanoNoch keine Bewertungen
- AMD Geode LX EPIC RDK PDFDokument26 SeitenAMD Geode LX EPIC RDK PDFURINoch keine Bewertungen
- Inclinometers: 8.IS40 - 2 X X X 1Dokument2 SeitenInclinometers: 8.IS40 - 2 X X X 1cheikh ahmedNoch keine Bewertungen
- 4x4x4 LED Cube (Arduino Uno) - AllDokument24 Seiten4x4x4 LED Cube (Arduino Uno) - All108databoxNoch keine Bewertungen
- Service Manual: DDX24BT, DDX340BTDokument94 SeitenService Manual: DDX24BT, DDX340BTDumur SaileshNoch keine Bewertungen
- User 010613Dokument60 SeitenUser 010613NurZul HealMeNoch keine Bewertungen
- Ie CepDokument11 SeitenIe Cepabdul shaggyNoch keine Bewertungen
- Ds 1038Dokument2 SeitenDs 1038api-345043542Noch keine Bewertungen
- Introduction To Power ElectronicsDokument29 SeitenIntroduction To Power ElectronicsSiddarameshwara HNNoch keine Bewertungen
- Chapter 2 Overview of Power Semiconductor DevicesDokument16 SeitenChapter 2 Overview of Power Semiconductor DevicesKleber PintoNoch keine Bewertungen
- Chapter 8 Microwave FiltersDokument53 SeitenChapter 8 Microwave FilterskhyatichavdaNoch keine Bewertungen
- Switch CapacitorDokument90 SeitenSwitch CapacitorVaibhav Khurana100% (1)
- Alnico Celestion Ruby: General SpecificationsDokument1 SeiteAlnico Celestion Ruby: General SpecificationsDaniel MambuscayNoch keine Bewertungen
- HP 260 G3 Desktop Mini Business PC PDFDokument29 SeitenHP 260 G3 Desktop Mini Business PC PDFRuben LopezNoch keine Bewertungen
- BD 2Dokument1 SeiteBD 2Luis Arturo Leiva Monjaras100% (1)
- Compal Confidential: Schematics Document Cougar 2.0Dokument39 SeitenCompal Confidential: Schematics Document Cougar 2.0VitakizNoch keine Bewertungen
- ECE104L Exp 4Dokument7 SeitenECE104L Exp 4Diana Jane Terez LazaroNoch keine Bewertungen
- DVC NotifierDokument4 SeitenDVC NotifierRoman ValenciaNoch keine Bewertungen
- Fault CodesDokument6 SeitenFault CodesLuis Miguel Mojica AgudeloNoch keine Bewertungen
- Bidirectional Visitor CounterDokument56 SeitenBidirectional Visitor CounterRahul Verma100% (4)
- Ah5f GaDokument2 SeitenAh5f GaNelson P. ColoNoch keine Bewertungen
- Spread Spectrum ModulationDokument19 SeitenSpread Spectrum ModulationUmang ShahNoch keine Bewertungen