Das könnte Ihnen auch gefallen
- Difference Equations in Normed Spaces: Stability and OscillationsVon EverandDifference Equations in Normed Spaces: Stability and OscillationsNoch keine Bewertungen
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11Von EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Noch keine Bewertungen
- HW No 1. February 14, 2017 SolutionDokument19 SeitenHW No 1. February 14, 2017 SolutionkhalidNoch keine Bewertungen
- HW No 2. February 26, 2017Dokument2 SeitenHW No 2. February 26, 2017khalidNoch keine Bewertungen
- Acs EndDokument4 SeitenAcs EndMalay DharNoch keine Bewertungen
- Massachusetts Institute of TechnologyDokument12 SeitenMassachusetts Institute of TechnologyKarishtain NewtonNoch keine Bewertungen
- Micro-Chaos in Digital Control: Summary. in This Paper We Analyze A Model For The Effect of Digital Control On OneDokument34 SeitenMicro-Chaos in Digital Control: Summary. in This Paper We Analyze A Model For The Effect of Digital Control On OneGeorge HallerNoch keine Bewertungen
- Matlab ManualDokument90 SeitenMatlab ManualSri Harsha57% (7)
- Lecture Chapter1 8newDokument188 SeitenLecture Chapter1 8newDinuka RavimalNoch keine Bewertungen
- Circuit Analysis in Time DomainDokument6 SeitenCircuit Analysis in Time DomainShiva SanthoshNoch keine Bewertungen
- 1 s2.0 S0375960198000395 MainDokument5 Seiten1 s2.0 S0375960198000395 MainRené Mboyo KouayepNoch keine Bewertungen
- Control Engg NotesDokument58 SeitenControl Engg NotesTudor Octavian RusuNoch keine Bewertungen
- HHT Alpha MethodDokument22 SeitenHHT Alpha MethodSasi Sudhahar ChinnasamyNoch keine Bewertungen
- Controlengg Compiled Sridar (Session 1 8)Dokument60 SeitenControlengg Compiled Sridar (Session 1 8)Prem T RajuNoch keine Bewertungen
- Output Linear Feedback For A Class of Nonlinear Systems Based On The Invariant Ellipsoid MethodDokument6 SeitenOutput Linear Feedback For A Class of Nonlinear Systems Based On The Invariant Ellipsoid MethodinfodotzNoch keine Bewertungen
- The Behavior of Dynamic Systems: 1.0 Where Are We in The Course?Dokument15 SeitenThe Behavior of Dynamic Systems: 1.0 Where Are We in The Course?Mariaa Angeles StewartNoch keine Bewertungen
- Optimization Based State Feedback Control Design For Impulse Elimination in Descriptor SystemsDokument5 SeitenOptimization Based State Feedback Control Design For Impulse Elimination in Descriptor SystemsAvinash KumarNoch keine Bewertungen
- TAN Activity2 Section5.1Dokument16 SeitenTAN Activity2 Section5.1ceferinotanNoch keine Bewertungen
- Chapter 2Dokument27 SeitenChapter 2hailegebreselassie24Noch keine Bewertungen
- 6.003 Homework #2: ProblemsDokument12 Seiten6.003 Homework #2: ProblemsRajeev SinghNoch keine Bewertungen
- Discrete-Time Signals and Systems, Part 2: 1. 50 MinutesDokument5 SeitenDiscrete-Time Signals and Systems, Part 2: 1. 50 Minutesapi-127299018Noch keine Bewertungen
- Physics Letters A: D.W. Lee, W.J. Yoo, S.C. WonDokument7 SeitenPhysics Letters A: D.W. Lee, W.J. Yoo, S.C. WonRafael Gonçalves de LimaNoch keine Bewertungen
- 2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021 Problem Set 2Dokument5 Seiten2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021 Problem Set 2Aman JalanNoch keine Bewertungen
- NIT RourkelaDokument2 SeitenNIT RourkelashubhobrataNoch keine Bewertungen
- Quispel 2008 J. Phys. A Math. Theor. 41 045206Dokument8 SeitenQuispel 2008 J. Phys. A Math. Theor. 41 045206Abid MullaNoch keine Bewertungen
- Physical Review Letters: Phase OrganizationDokument4 SeitenPhysical Review Letters: Phase OrganizationaldoNoch keine Bewertungen
- Exercises in Nonlinear Control SystemsDokument99 SeitenExercises in Nonlinear Control SystemsRiccardo M.G. Ferrari100% (2)
- Chapter 2Dokument44 SeitenChapter 2محمد فائزNoch keine Bewertungen
- Asymmetric Mathieu EquationsDokument18 SeitenAsymmetric Mathieu Equationsamol maratheNoch keine Bewertungen
- 59 9 StabilizationDokument9 Seiten59 9 StabilizationSri HaranNoch keine Bewertungen
- MCHE485 Final Spring2015Dokument8 SeitenMCHE485 Final Spring2015Mahdi KarimiNoch keine Bewertungen
- Assignment 2Dokument7 SeitenAssignment 2ue06037Noch keine Bewertungen
- Paper 25Dokument6 SeitenPaper 25Daniel G Canton PuertoNoch keine Bewertungen
- Old Exams - 3rd MT (2017-3) - AMRDokument2 SeitenOld Exams - 3rd MT (2017-3) - AMRAndrea SabogalNoch keine Bewertungen
- Quantum Algorithm For Nonhomogeneous Linear Partial Differential EquationsDokument9 SeitenQuantum Algorithm For Nonhomogeneous Linear Partial Differential EquationsJonas AraújoNoch keine Bewertungen
- Cce330 (B) L: Matlab Applications in Signals and (Bio) Systems: American University of Science & TechnologyDokument7 SeitenCce330 (B) L: Matlab Applications in Signals and (Bio) Systems: American University of Science & TechnologyDani Hajj Ali SleimanNoch keine Bewertungen
- Kon405E - State Space Methods in Control Systems Homework #2Dokument2 SeitenKon405E - State Space Methods in Control Systems Homework #2T KaripNoch keine Bewertungen
- Gujarat Technological UniversityDokument2 SeitenGujarat Technological UniversityTanvir KaziNoch keine Bewertungen
- Mass Spring Damper SystemDokument2 SeitenMass Spring Damper SystemDivya Bharathi SNoch keine Bewertungen
- Final 2019Dokument2 SeitenFinal 2019Cường Dương QuốcNoch keine Bewertungen
- Backlash Compensation in Nonlinear Systems Using Dynamic Inversion by Neural NetworksDokument12 SeitenBacklash Compensation in Nonlinear Systems Using Dynamic Inversion by Neural NetworksrodrigoipnNoch keine Bewertungen
- MCHE485 MidTerm1 Solutions Spring2016Dokument13 SeitenMCHE485 MidTerm1 Solutions Spring2016AliOucharNoch keine Bewertungen
- A Direct Algorithm For Pole Placement by StatederivativeDokument9 SeitenA Direct Algorithm For Pole Placement by StatederivativeMedo AnaNoch keine Bewertungen
- Control m1-3Dokument86 SeitenControl m1-3naughty dela cruzNoch keine Bewertungen
- Acs 2019s1 Assn1Dokument5 SeitenAcs 2019s1 Assn1MiraelNoch keine Bewertungen
- Aeroelasticity2018-2019 Ex1Dokument2 SeitenAeroelasticity2018-2019 Ex1jacazio.brischettoNoch keine Bewertungen
- Kon407E - State Space Methods in Control Systems Homework # 3Dokument2 SeitenKon407E - State Space Methods in Control Systems Homework # 3T KaripNoch keine Bewertungen
- Signals Systems Lab 2Dokument5 SeitenSignals Systems Lab 2ahmad.a.touseefNoch keine Bewertungen
- H1Pzplot - JPG.: Coe 121 Programming Exercise 06: Frequency-Domain Analysis of Lti Systems 2 Semester 2018-2019Dokument3 SeitenH1Pzplot - JPG.: Coe 121 Programming Exercise 06: Frequency-Domain Analysis of Lti Systems 2 Semester 2018-2019Apricot BlueberryNoch keine Bewertungen
- Experiment # 3 Mathematical Modelling and Simulation of Mechanical SystemsDokument7 SeitenExperiment # 3 Mathematical Modelling and Simulation of Mechanical SystemsFahad AneebNoch keine Bewertungen
- Exercises in Nonlinear Control SystemsDokument115 SeitenExercises in Nonlinear Control SystemsAshk Nori ZadehNoch keine Bewertungen
- Feedback Systems QuestionsDokument2 SeitenFeedback Systems QuestionsutkanpazarNoch keine Bewertungen
- Lab 3Dokument1 SeiteLab 3Shiyang CaiNoch keine Bewertungen
- BIEN462 A1Dokument4 SeitenBIEN462 A1Eileen FuNoch keine Bewertungen
- 2 - Vibration Isolation PDFDokument3 Seiten2 - Vibration Isolation PDFAhmad Ayman FaroukNoch keine Bewertungen
- Nonlinear Control Midterm ExamDokument1 SeiteNonlinear Control Midterm Examtes2004Noch keine Bewertungen
- On Sub Riemannian Structures and Related Mechanics: Sarika M. Patil, T. Venkatesh, J.V. RamanarajuDokument3 SeitenOn Sub Riemannian Structures and Related Mechanics: Sarika M. Patil, T. Venkatesh, J.V. RamanarajuInternational Jpurnal Of Technical Research And ApplicationsNoch keine Bewertungen
- Transfer Functions of One-Dimensional Distributed Parameter SystemsDokument6 SeitenTransfer Functions of One-Dimensional Distributed Parameter SystemsGabriel SaavedraNoch keine Bewertungen
- Collings1978 PDFDokument12 SeitenCollings1978 PDFchristopheNoch keine Bewertungen
- Updating An LU Factorization With PivotingDokument16 SeitenUpdating An LU Factorization With PivotingCristina HerzNoch keine Bewertungen
- ARE - 510 - 6 - Programming and LanguagesDokument31 SeitenARE - 510 - 6 - Programming and LanguageskhalidNoch keine Bewertungen
- Are 510 7 KbesDokument51 SeitenAre 510 7 KbeskhalidNoch keine Bewertungen
- Software RETScreenDokument45 SeitenSoftware RETScreenkhalidNoch keine Bewertungen
- Sustainability 13 06776 v3Dokument24 SeitenSustainability 13 06776 v3khalidNoch keine Bewertungen
- Sustainability 13 05878Dokument15 SeitenSustainability 13 05878khalidNoch keine Bewertungen
- ARE - 510 - 3 - Specialized ApplicationDokument33 SeitenARE - 510 - 3 - Specialized ApplicationkhalidNoch keine Bewertungen
- Hybrid Energy Storage System For Voltage Stability in A DC Microgrid Using A Modified Control StrategyDokument6 SeitenHybrid Energy Storage System For Voltage Stability in A DC Microgrid Using A Modified Control StrategykhalidNoch keine Bewertungen
- The Value of Interval Meter Data: in Solar PV Project AnalysisDokument11 SeitenThe Value of Interval Meter Data: in Solar PV Project AnalysiskhalidNoch keine Bewertungen
- Innovative Energy Islands: Life-Cycle Cost-Benefit Analysis For Battery Energy StorageDokument19 SeitenInnovative Energy Islands: Life-Cycle Cost-Benefit Analysis For Battery Energy StoragekhalidNoch keine Bewertungen
- Fuzzy Logic BasicsDokument19 SeitenFuzzy Logic BasicskhalidNoch keine Bewertungen
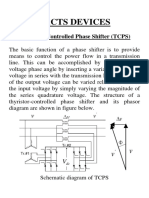
- Facts Devices: 1. Thyristor-Controlled Phase Shifter (TCPS)Dokument8 SeitenFacts Devices: 1. Thyristor-Controlled Phase Shifter (TCPS)khalidNoch keine Bewertungen
- 2020 Book FundamentalsOfElectricalPowerSDokument554 Seiten2020 Book FundamentalsOfElectricalPowerSkhalidNoch keine Bewertungen
- Energy: Qian Lin, Jun Wang, Rui Xiong, Weixiang Shen, Hongwen HeDokument15 SeitenEnergy: Qian Lin, Jun Wang, Rui Xiong, Weixiang Shen, Hongwen HekhalidNoch keine Bewertungen
- Transformer Sizing Using ETAP PDFDokument24 SeitenTransformer Sizing Using ETAP PDFkhalidNoch keine Bewertungen
- EE-520 (171) Dr. Ibrahim O. Habiballah Home Work 2: Use The Chained Data Structure Method For Storing Symmetric YDokument5 SeitenEE-520 (171) Dr. Ibrahim O. Habiballah Home Work 2: Use The Chained Data Structure Method For Storing Symmetric YkhalidNoch keine Bewertungen
- 0b Three Phase IOHDokument28 Seiten0b Three Phase IOHkhalidNoch keine Bewertungen
- 01 Components ModelingDokument5 Seiten01 Components ModelingkhalidNoch keine Bewertungen
- Renewable and Sustainable Energy Reviews: Recent Developments in Microgrids and Example Cases Around The World-A ReviewDokument12 SeitenRenewable and Sustainable Energy Reviews: Recent Developments in Microgrids and Example Cases Around The World-A ReviewkhalidNoch keine Bewertungen
- King Fahd University of Petroleum & Minerals Electrical Engineering Department EE 520Dokument1 SeiteKing Fahd University of Petroleum & Minerals Electrical Engineering Department EE 520khalidNoch keine Bewertungen
- EE520 Hw2 171Dokument1 SeiteEE520 Hw2 171khalidNoch keine Bewertungen
- EE 622 Assignment 5Dokument1 SeiteEE 622 Assignment 5khalidNoch keine Bewertungen
- EM&IDokument34 SeitenEM&IAnonymous m8oCtJBNoch keine Bewertungen
- 2466 To 2470 EDC MicroprojectDokument20 Seiten2466 To 2470 EDC MicroprojectAkash AkNoch keine Bewertungen
- Chap 08Dokument34 SeitenChap 08marihomenonNoch keine Bewertungen
- Lecture #1 Resistance - The Property of A Material Tending To Prevent The Flow of ElectronsDokument3 SeitenLecture #1 Resistance - The Property of A Material Tending To Prevent The Flow of ElectronsBolocon, Harvey Jon DelfinNoch keine Bewertungen
- Diffraction From N Number of SlitsDokument44 SeitenDiffraction From N Number of SlitsPiyush BhatnagarNoch keine Bewertungen
- Design Note For Air Reciever TankDokument6 SeitenDesign Note For Air Reciever TankJoshua Balaram RaoNoch keine Bewertungen
- Shindengen: Super Fast Recovery RectifiersDokument7 SeitenShindengen: Super Fast Recovery RectifiersCharbel TadrosNoch keine Bewertungen
- 4ph1 2prDokument20 Seiten4ph1 2prFatimah Afzal100% (1)
- Schneider - Electric RM4JA32M DatasheetDokument9 SeitenSchneider - Electric RM4JA32M DatasheetRandriamampianina Miora HarisataNoch keine Bewertungen
- 48pd 01pdDokument31 Seiten48pd 01pdnasv1985Noch keine Bewertungen
- MVPS2200 3000 DEN1820 V40webDokument4 SeitenMVPS2200 3000 DEN1820 V40webGiancarlo Muñoz GalvezNoch keine Bewertungen
- Tutorial 2-1Dokument2 SeitenTutorial 2-1Ananthi JeyarajuNoch keine Bewertungen
- Day Wise Lesson PlanDokument34 SeitenDay Wise Lesson PlanSatyajit PandaNoch keine Bewertungen
- 3.5 Core Aluminium PVC Armoured Power CablesDokument2 Seiten3.5 Core Aluminium PVC Armoured Power CablesRavindra JadhavNoch keine Bewertungen
- Magnetic Properties of Materials PDFDokument31 SeitenMagnetic Properties of Materials PDFPavan_yoyo100% (1)
- Acyaby / Acyaby-F: Low Voltage Power Cables (0.6/1 KV)Dokument2 SeitenAcyaby / Acyaby-F: Low Voltage Power Cables (0.6/1 KV)Kanfra SolNoch keine Bewertungen
- Cali Ashrae N 20Dokument1 SeiteCali Ashrae N 20IvanNoch keine Bewertungen
- Deformation Past Paper QuestionsDokument4 SeitenDeformation Past Paper QuestionsNudrat50% (6)
- Growatt Min 5000tlxDokument2 SeitenGrowatt Min 5000tlxMatheus FariasNoch keine Bewertungen
- HydroHelp 1 AN EXCEL PROGRAM DEVELOPED FOR TURBINE-GENERATOR SELECTION FOR HYDROELECTRIC SITESDokument6 SeitenHydroHelp 1 AN EXCEL PROGRAM DEVELOPED FOR TURBINE-GENERATOR SELECTION FOR HYDROELECTRIC SITESamoghimiNoch keine Bewertungen
- 1 s2.0 S0360544221032576 MainDokument14 Seiten1 s2.0 S0360544221032576 Mainmd yousupNoch keine Bewertungen
- Density ExplainedDokument3 SeitenDensity Explainedapi-256236481Noch keine Bewertungen
- Forces, Movement, Shape and Momentum 1 MSDokument9 SeitenForces, Movement, Shape and Momentum 1 MStheja sudarshaniNoch keine Bewertungen
- Hyundai Inverter-N700E: The Controlling Solution of Powerful Inverter BrandDokument50 SeitenHyundai Inverter-N700E: The Controlling Solution of Powerful Inverter Brandmasterdesign1978Noch keine Bewertungen
- Design and Implementation of Magnetron Power Supply and EmulatorDokument10 SeitenDesign and Implementation of Magnetron Power Supply and Emulatorinty vacaNoch keine Bewertungen
- TestDokument361 SeitenTestJake Sy100% (1)
- Tanker Cargo Calculation GuidelinesDokument3 SeitenTanker Cargo Calculation GuidelinesJohn Green80% (5)
- Analytical Estimation of Short Circuit Axial Force - 4Dokument2 SeitenAnalytical Estimation of Short Circuit Axial Force - 4amulya sNoch keine Bewertungen
- Basic Electronics Lab ManualDokument100 SeitenBasic Electronics Lab ManualMitchell Cifuentes100% (4)
- CPC 100 CP TD1 CR500 DIRANA MPD 600 Article Ensuring A Reliable Power Supply OMICRON Magazine 2015 ENUDokument3 SeitenCPC 100 CP TD1 CR500 DIRANA MPD 600 Article Ensuring A Reliable Power Supply OMICRON Magazine 2015 ENUarnenylundNoch keine Bewertungen