Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Compresor Model 3DDokument11 SeitenCompresor Model 3DCris BraduNoch keine Bewertungen
- 1+2 Etapa Reductor Proiect MathcadDokument3 Seiten1+2 Etapa Reductor Proiect MathcadCris BraduNoch keine Bewertungen
- Ansamblu Coloana Volanului A2Dokument1 SeiteAnsamblu Coloana Volanului A2Cris BraduNoch keine Bewertungen
- Ansamblu Pinion Cremaliera ARDokument1 SeiteAnsamblu Pinion Cremaliera ARCris BraduNoch keine Bewertungen
- Alex Program2Dokument2 SeitenAlex Program2Cris BraduNoch keine Bewertungen
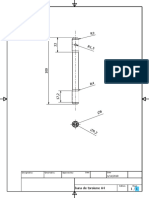
- Bara de Torsiune A4Dokument1 SeiteBara de Torsiune A4Cris BraduNoch keine Bewertungen
- Specialized Bike HardrockDokument17 SeitenSpecialized Bike HardrockCris BraduNoch keine Bewertungen
- Chapter 81Dokument43 SeitenChapter 81Samraiz HameedNoch keine Bewertungen
- 6.3.1 Gear Terms Lesson Rev3Dokument19 Seiten6.3.1 Gear Terms Lesson Rev3meg77717Noch keine Bewertungen
- 1442935389Dokument7 Seiten1442935389Cris BraduNoch keine Bewertungen
- 6116 1-EnDokument218 Seiten6116 1-EnLuong Tam ThinhNoch keine Bewertungen
- TT - Sept 09 PDFDokument4 SeitenTT - Sept 09 PDFAmir Ali JanbakhshNoch keine Bewertungen
- Serie-60 Brochure enDokument28 SeitenSerie-60 Brochure enCris BraduNoch keine Bewertungen
- Geringhoff-Operating Manual Rota Disc RigidDokument152 SeitenGeringhoff-Operating Manual Rota Disc RigidCris BraduNoch keine Bewertungen
- ValveDokument26 SeitenValveCris BraduNoch keine Bewertungen
- 8101Dokument1 Seite8101Cris BraduNoch keine Bewertungen
- Chapter 81Dokument43 SeitenChapter 81Samraiz HameedNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Composite Function Worksheet-02Dokument4 SeitenComposite Function Worksheet-02Marcus Maccoy AcordaNoch keine Bewertungen
- Analisis Penerapan Prinsip Prinsip Koperasi Dalam UUDDokument10 SeitenAnalisis Penerapan Prinsip Prinsip Koperasi Dalam UUDSaikhudinNoch keine Bewertungen
- GIS Thermografie Audits PDFDokument2 SeitenGIS Thermografie Audits PDFkhalidfarooq009Noch keine Bewertungen
- Lllllllllllllllllillll - L - L - !) !) ) L) (L) !) ) L! (L) LLLLLLLLLLLLLLLLLLLLLLLLLLDokument6 SeitenLllllllllllllllllillll - L - L - !) !) ) L) (L) !) ) L! (L) LLLLLLLLLLLLLLLLLLLLLLLLLLesssiNoch keine Bewertungen
- Uci Xco Me Results XDokument4 SeitenUci Xco Me Results XSimone LanciottiNoch keine Bewertungen
- Abcc1103 - Introduction To CommunicationDokument16 SeitenAbcc1103 - Introduction To CommunicationSimon RajNoch keine Bewertungen
- Cooperative Memorandum of Agreement For Work Immersion Partnership To Be EditedDokument7 SeitenCooperative Memorandum of Agreement For Work Immersion Partnership To Be EditedRomelo Muldez100% (1)
- Factors Affecting Employee Turnover and Job SatisfactionDokument14 SeitenFactors Affecting Employee Turnover and Job Satisfactionfarah goharNoch keine Bewertungen
- Organization StructureDokument11 SeitenOrganization StructureKaran RoyNoch keine Bewertungen
- Table With Row Headers in Column A and Column Headers in Rows 5 To 7. Leading Dots Indicate SubpartsDokument2 SeitenTable With Row Headers in Column A and Column Headers in Rows 5 To 7. Leading Dots Indicate SubpartsJeffrey DuqueNoch keine Bewertungen
- 2007 Magnetom Flash 1 1Dokument88 Seiten2007 Magnetom Flash 1 1Herick Savione100% (2)
- Grade 8 Science Unit 1 Force, Motion and EnergyDokument68 SeitenGrade 8 Science Unit 1 Force, Motion and EnergyKeil Morada73% (26)
- Land Reclamation in SingaporeDokument27 SeitenLand Reclamation in SingaporeAbdul JabbarNoch keine Bewertungen
- PDFDokument258 SeitenPDFfathy MoghiraNoch keine Bewertungen
- Safe City in Malaysia's ContextDokument8 SeitenSafe City in Malaysia's Contextuyunaman100% (1)
- Customer Relationship Management: Summer Internship ProjectDokument16 SeitenCustomer Relationship Management: Summer Internship ProjectSoniNitinNoch keine Bewertungen
- End of Semester ReflectionDokument3 SeitenEnd of Semester Reflectionapi-242745290Noch keine Bewertungen
- Government of Maharashtra: State Common Entrance Test Cell, Maharashtra State, MumbaiDokument1 SeiteGovernment of Maharashtra: State Common Entrance Test Cell, Maharashtra State, MumbaiDhiraj Jagtap [011]Noch keine Bewertungen
- 2005 - Quality Criteria of Transdisciplinary ResearchDokument78 Seiten2005 - Quality Criteria of Transdisciplinary Researchis03lcmNoch keine Bewertungen
- SPPA-T3000 Control System The Benchmark in Controls: Siemens Power & Process AutomationDokument16 SeitenSPPA-T3000 Control System The Benchmark in Controls: Siemens Power & Process AutomationTiar FatihNoch keine Bewertungen
- FROG Chapter08 PDFDokument37 SeitenFROG Chapter08 PDF신재호Noch keine Bewertungen
- Introduction To Forensic Science Questioned DocumentsDokument50 SeitenIntroduction To Forensic Science Questioned DocumentsLyka C. De Guzman100% (2)
- JjiDokument64 SeitenJjiPriyanka YaduNoch keine Bewertungen
- Pass Microsoft 74-343 Exam: Number: 74-343 Passing Score: 800 Time Limit: 120 Min File Version: 40.2Dokument26 SeitenPass Microsoft 74-343 Exam: Number: 74-343 Passing Score: 800 Time Limit: 120 Min File Version: 40.2tapera_mangeziNoch keine Bewertungen
- Oracle OTL Timecard Layout CustomicationDokument138 SeitenOracle OTL Timecard Layout CustomicationFoolIshNoch keine Bewertungen
- MIS (Management Information Systems) : Margaret RouseDokument3 SeitenMIS (Management Information Systems) : Margaret RouseSANDUN KAVINDANoch keine Bewertungen
- Lista de Paineis LCD Atualizacao 26 04 2013 PDFDokument412 SeitenLista de Paineis LCD Atualizacao 26 04 2013 PDFHfssSilva100% (4)
- Barretts Taxonomy ColourDokument2 SeitenBarretts Taxonomy Colourafnan fathiNoch keine Bewertungen
- Formalization of UML Use Case Diagram-A Z Notation Based ApproachDokument6 SeitenFormalization of UML Use Case Diagram-A Z Notation Based ApproachAnonymous PQ4M0ZzG7yNoch keine Bewertungen
- Design and Fabrication Dual Side Shaper MachineDokument2 SeitenDesign and Fabrication Dual Side Shaper MachineKarthik DmNoch keine Bewertungen