Das könnte Ihnen auch gefallen
- RM08D01 11Dokument10 SeitenRM08D01 11Omar Milián MorónNoch keine Bewertungen
- KISTLER 4502a - EnglishDokument8 SeitenKISTLER 4502a - EnglishDexter PoliNoch keine Bewertungen
- Data Sheet For Precision Potentiometer: Singleturn Wirewound Potentiometer Series RP19/20Dokument5 SeitenData Sheet For Precision Potentiometer: Singleturn Wirewound Potentiometer Series RP19/20Adriano VolanteNoch keine Bewertungen
- DS MP20 21 enDokument5 SeitenDS MP20 21 enrudirstNoch keine Bewertungen
- DS MP20 21 enDokument5 SeitenDS MP20 21 enRahma Ni'maturNoch keine Bewertungen
- Baumer EAM580R Kit Analog DS enDokument5 SeitenBaumer EAM580R Kit Analog DS enSatria PininggitNoch keine Bewertungen
- DS MP20 21 enDokument5 SeitenDS MP20 21 enNabeel MohammedNoch keine Bewertungen
- Modules-Stada 2022Dokument36 SeitenModules-Stada 2022akbar raizoNoch keine Bewertungen
- SRS-008 SCA128T DatasheetDokument7 SeitenSRS-008 SCA128T DatasheetmiqbalNoch keine Bewertungen
- Technical Data: NCB8-18GM40-N0-V1Dokument3 SeitenTechnical Data: NCB8-18GM40-N0-V1Juan Pablo MarvalNoch keine Bewertungen
- Akg392 Mems Digital AccelerometerDokument15 SeitenAkg392 Mems Digital AccelerometerPrasika YogaNoch keine Bewertungen
- Baumer TDP-0-09 EN 20220215 DSDokument4 SeitenBaumer TDP-0-09 EN 20220215 DSSibtain RazaNoch keine Bewertungen
- 1GT105DC PDFDokument4 Seiten1GT105DC PDFIsos CellNoch keine Bewertungen
- 1GT105DC PDFDokument4 Seiten1GT105DC PDFIsos CellNoch keine Bewertungen
- CP-2HK Series: Dimension (MM)Dokument2 SeitenCP-2HK Series: Dimension (MM)Gustavo YbañezNoch keine Bewertungen
- Inclinometer Lca326t PDFDokument10 SeitenInclinometer Lca326t PDFManasi NaikNoch keine Bewertungen
- Data Sheet For Precision Potentiometer: Multiturn Wirewound Potentiometer Series AL17/19Dokument6 SeitenData Sheet For Precision Potentiometer: Multiturn Wirewound Potentiometer Series AL17/19Danna PerezNoch keine Bewertungen
- Data Sheet For Precision Potentiometer: Multiturn Wirewound Potentiometer Series AL17/19Dokument6 SeitenData Sheet For Precision Potentiometer: Multiturn Wirewound Potentiometer Series AL17/19Danna PerezNoch keine Bewertungen
- Data Sheet For Precision Potentiometer: Multiturn Wirewound Potentiometer Series AL17/19Dokument6 SeitenData Sheet For Precision Potentiometer: Multiturn Wirewound Potentiometer Series AL17/19Danna PerezNoch keine Bewertungen
- DS AL17 19 enDokument6 SeitenDS AL17 19 enJose ReyesNoch keine Bewertungen
- RMB 30Dokument6 SeitenRMB 30Nishant KalbhorNoch keine Bewertungen
- Datasheet A3M60A-BEPB014x17 1053332 enDokument8 SeitenDatasheet A3M60A-BEPB014x17 1053332 enRadu StamatinNoch keine Bewertungen
- Baumer EAM580R Encoder ENDokument6 SeitenBaumer EAM580R Encoder ENRchrdStrkNoch keine Bewertungen
- Incremental Encoder For Motors M15: N N N N N N N N N NDokument5 SeitenIncremental Encoder For Motors M15: N N N N N N N N N NpomsarexnbNoch keine Bewertungen
- RMC35 Commutation and Incremental Encoder SolutionDokument5 SeitenRMC35 Commutation and Incremental Encoder SolutionJunior ArroyoNoch keine Bewertungen
- Blade 360 Sensor Posicion Rotativo SensovantDokument2 SeitenBlade 360 Sensor Posicion Rotativo SensovantGianfranco JulcaNoch keine Bewertungen
- Rotary DIP Switch A6R, A6RVDokument4 SeitenRotary DIP Switch A6R, A6RVMuhamad PriyatnaNoch keine Bewertungen
- 03 A 02 ExN 13xx Aufzugtechnik en PDFDokument7 Seiten03 A 02 ExN 13xx Aufzugtechnik en PDFAnonymous K2uYsqNoch keine Bewertungen
- 3-Axis Compass With Algorithms HMC6343: Features BenefitsDokument13 Seiten3-Axis Compass With Algorithms HMC6343: Features BenefitsrajNoch keine Bewertungen
- Baumer EAM580R-B-Analog EN 20230605 DSDokument5 SeitenBaumer EAM580R-B-Analog EN 20230605 DSVijeesh T VargheseNoch keine Bewertungen
- TE InclinometerDokument4 SeitenTE InclinometerPankaj RamoleNoch keine Bewertungen
- Sec385 TMDokument13 SeitenSec385 TMАндрейNoch keine Bewertungen
- Inclinometro NGI - eDokument3 SeitenInclinometro NGI - ebetobebetoNoch keine Bewertungen
- NOVOTECHNIK传感器RSM2800系列简介及技术资料Dokument5 SeitenNOVOTECHNIK传感器RSM2800系列简介及技术资料Orlando CastroNoch keine Bewertungen
- High-Performance Pushbutton Switch With Built-In Subminiature Basic SwitchDokument3 SeitenHigh-Performance Pushbutton Switch With Built-In Subminiature Basic Switchkasim leeNoch keine Bewertungen
- Series P2500: Standard PotentiometersDokument2 SeitenSeries P2500: Standard PotentiometersRodica PuscauNoch keine Bewertungen
- Schaevitz Sensors 02560231 000 DatasheetDokument3 SeitenSchaevitz Sensors 02560231 000 DatasheetLuca MidaliNoch keine Bewertungen
- Edb 4672441 Eng UsDokument3 SeitenEdb 4672441 Eng UsGrucito KonfyNoch keine Bewertungen
- Inductive Sensor With Extended Switching Distance: DatasheetDokument2 SeitenInductive Sensor With Extended Switching Distance: DatasheetEric RNoch keine Bewertungen
- VM 6083 - 60B1 Data SheetDokument3 SeitenVM 6083 - 60B1 Data SheetMinh HoàngNoch keine Bewertungen
- DIFEDokument2 SeitenDIFEalfredo alegriaNoch keine Bewertungen
- 3-Axis Digital Compass IC HMC5883L: Features BenefitsDokument18 Seiten3-Axis Digital Compass IC HMC5883L: Features BenefitsMuhammad Firza AsharNoch keine Bewertungen
- Bm1422agmv eDokument28 SeitenBm1422agmv ecalltokamalNoch keine Bewertungen
- Precision Potentiometer: Model 7280 SeriesDokument5 SeitenPrecision Potentiometer: Model 7280 SeriesMohamed ReyadNoch keine Bewertungen
- Modelo 357Dokument3 SeitenModelo 357Marco Antonio Esquivel BarretoNoch keine Bewertungen
- CPP 45 BDokument2 SeitenCPP 45 BWahyudi andhika comNoch keine Bewertungen
- DTS Tkda 08-2019 EngDokument2 SeitenDTS Tkda 08-2019 EngErick PerezNoch keine Bewertungen
- QG40N KIXv XXX ASP CM ULDokument2 SeitenQG40N KIXv XXX ASP CM ULAdolfo MartinezNoch keine Bewertungen
- Industrial Icp® Accelerometer: 603C91 Performance English SI Optional VersionsDokument1 SeiteIndustrial Icp® Accelerometer: 603C91 Performance English SI Optional VersionsKaradiasNoch keine Bewertungen
- Ti Dgs66-Haz0-S04 enDokument3 SeitenTi Dgs66-Haz0-S04 enrcv436Noch keine Bewertungen
- 4 V Current Transducer HAT 200 ... 1500-SDokument3 Seiten4 V Current Transducer HAT 200 ... 1500-SBharaneeNoch keine Bewertungen
- 3-Axis Digital Compass IC HMC5983: Features BenefitDokument28 Seiten3-Axis Digital Compass IC HMC5983: Features BenefitCharitha WeerasooriyaNoch keine Bewertungen
- MouseSensor MCS 12086 DatasheetDokument7 SeitenMouseSensor MCS 12086 Datasheetpourya amiriNoch keine Bewertungen
- Baumer GM400 EN 20230104 DSDokument9 SeitenBaumer GM400 EN 20230104 DSfranciscoNoch keine Bewertungen
- HMC5883L DatasheetDokument21 SeitenHMC5883L DatasheetkishorevennelaNoch keine Bewertungen
- 100 A Current Transducer LA 100-TPDokument3 Seiten100 A Current Transducer LA 100-TPEletronica CamposNoch keine Bewertungen
- Prose Mb-G64o9x65v-00Dokument3 SeitenProse Mb-G64o9x65v-00hasib_muhammedNoch keine Bewertungen
- DT-5TP - Manual (03.2020)Dokument8 SeitenDT-5TP - Manual (03.2020)Matheus AndreoNoch keine Bewertungen
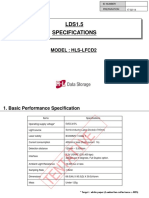
- LDS Basic SpecificationDokument9 SeitenLDS Basic SpecificationBarinua deekorNoch keine Bewertungen
- Cable List Supply Cable in Package # 27Dokument5 SeitenCable List Supply Cable in Package # 27Ibrar HussainNoch keine Bewertungen
- MR Service ManualDokument42 SeitenMR Service ManualqdzungNoch keine Bewertungen
- 2019 Summer Model Answer Paper (Msbte Study Resources)Dokument25 Seiten2019 Summer Model Answer Paper (Msbte Study Resources)samarthenterprises122Noch keine Bewertungen
- Autometer Water Temp 4337 InstructionsDokument2 SeitenAutometer Water Temp 4337 InstructionsVimaceNoch keine Bewertungen
- FXSQ-P7VEB - Technical Data - RuDokument31 SeitenFXSQ-P7VEB - Technical Data - RuAmer GaladNoch keine Bewertungen
- Magnetostatics PPTDokument44 SeitenMagnetostatics PPTMoitreya Adhikary100% (1)
- Eds 8000Dokument16 SeitenEds 8000Gustavo AngelNoch keine Bewertungen
- Sensor and TransducerDokument15 SeitenSensor and Transducerrashmi patil100% (1)
- ABB Monitoring System SAM 3.0 - Data Sheet 1HC0076312 E01 ABDokument4 SeitenABB Monitoring System SAM 3.0 - Data Sheet 1HC0076312 E01 ABlatifNoch keine Bewertungen
- A3941 PDFDokument20 SeitenA3941 PDFEzequiel AriasNoch keine Bewertungen
- Oven (Hot Air Oven)Dokument4 SeitenOven (Hot Air Oven)Ahmed Ali AssafNoch keine Bewertungen
- Advanced English Test 1 - Đề ôn thi chuyên Anh có file nghe, đáp ánDokument11 SeitenAdvanced English Test 1 - Đề ôn thi chuyên Anh có file nghe, đáp ánMinh Anh NguyễnNoch keine Bewertungen
- HP EQUIVWPN-wmDokument16 SeitenHP EQUIVWPN-wmstruja2010Noch keine Bewertungen
- Solar ACDB, Solar DCDB Manufacturer & Supplier in Ahmedabad, IndiaDokument4 SeitenSolar ACDB, Solar DCDB Manufacturer & Supplier in Ahmedabad, IndiaSamptel EnergyNoch keine Bewertungen
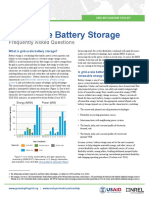
- Grid Scale Battery StorageDokument8 SeitenGrid Scale Battery StoragetyaskartikaNoch keine Bewertungen
- Stamford Ucdi274kDokument7 SeitenStamford Ucdi274kSilver SilverNoch keine Bewertungen
- Energy Meter Based On Artificial IntelligenceDokument16 SeitenEnergy Meter Based On Artificial IntelligenceJaNoch keine Bewertungen
- 8发电机启动停机检查Dokument19 Seiten8发电机启动停机检查Ruben MaychelNoch keine Bewertungen
- 5-大规模电力系统仿真用新能源... 模方法研究 (一) 模型结构 孙华东Dokument12 Seiten5-大规模电力系统仿真用新能源... 模方法研究 (一) 模型结构 孙华东Qin yuwenNoch keine Bewertungen
- Handbook of Vacuum Arc Science and TechnologyDokument772 SeitenHandbook of Vacuum Arc Science and TechnologynguyenthanhhopNoch keine Bewertungen
- UDR MANUFACTURE ManufacturesDokument8 SeitenUDR MANUFACTURE ManufacturesQuadri Consultancy ServicesNoch keine Bewertungen
- To Find Current Flowing Through Load Resistor by Using Thevenin's TheoremDokument1 SeiteTo Find Current Flowing Through Load Resistor by Using Thevenin's TheoremmohsinsafiNoch keine Bewertungen
- Lab - 8 - Common Emitter Amplifiers-IIDokument5 SeitenLab - 8 - Common Emitter Amplifiers-IIAhmed ChNoch keine Bewertungen
- Industry Consultation On Daylight ReflectanceDokument26 SeitenIndustry Consultation On Daylight ReflectanceNhi Võ Trần YếnNoch keine Bewertungen
- Experiment No.3Dokument6 SeitenExperiment No.3justinepunzalan250% (1)
- Pipelined ADC ThesisDokument54 SeitenPipelined ADC ThesisHarshita MehtonNoch keine Bewertungen
- Tugas BJT Triac SCR Fet Darlinton - 151354018Dokument43 SeitenTugas BJT Triac SCR Fet Darlinton - 151354018Fauzan FlickNoch keine Bewertungen
- Biopotential ElectrodesDokument5 SeitenBiopotential ElectrodesAndres VillafuerteNoch keine Bewertungen
- Low Battery Capacity Alarm PDFDokument21 SeitenLow Battery Capacity Alarm PDFAli Noureddine100% (2)
- 20 - How To Calculate Wire & Fuse Sizes For Electric MotorsDokument2 Seiten20 - How To Calculate Wire & Fuse Sizes For Electric MotorsLNoch keine Bewertungen