Das könnte Ihnen auch gefallen
- Computer Methods in Power Systems Analysis with MATLABVon EverandComputer Methods in Power Systems Analysis with MATLABNoch keine Bewertungen
- Transient Short Circuit Current Calculation Using Decoupled NetworksDokument5 SeitenTransient Short Circuit Current Calculation Using Decoupled NetworksPadmo PadmundonoNoch keine Bewertungen
- Symmetrical Components: The Commonwealth and International Library: Applied Electricity and Electronics DivisionVon EverandSymmetrical Components: The Commonwealth and International Library: Applied Electricity and Electronics DivisionBewertung: 4 von 5 Sternen4/5 (2)
- Impulse Voltage Generator Modelling Using MATLABDokument7 SeitenImpulse Voltage Generator Modelling Using MATLABKsr AkhilNoch keine Bewertungen
- Theiec909Standardanddynamicsimulation: of Short-Circuit CurrentsDokument9 SeitenTheiec909Standardanddynamicsimulation: of Short-Circuit CurrentsIBA PUNoch keine Bewertungen
- Novel Space Vector Based Current Controllers For PWM-InvertersDokument9 SeitenNovel Space Vector Based Current Controllers For PWM-InvertersVlad GabrielNoch keine Bewertungen
- Models of Synchronous Generator and Transformers For Dispatch Training Simulators and Real Time Digital SimulatorsDokument6 SeitenModels of Synchronous Generator and Transformers For Dispatch Training Simulators and Real Time Digital Simulatorsiraj_214Noch keine Bewertungen
- Phase Current Control of A Two Phase Synchronous Reluctance MachineDokument7 SeitenPhase Current Control of A Two Phase Synchronous Reluctance MachineapacheNoch keine Bewertungen
- Effect of Power Transformer Neutral Grounding On High Voltage Network Single Phase Short Circuit LevelDokument7 SeitenEffect of Power Transformer Neutral Grounding On High Voltage Network Single Phase Short Circuit Levelمحمد الأمين سنوساويNoch keine Bewertungen
- Syn. Generator SimulatinDokument6 SeitenSyn. Generator SimulatinAnonymous C9ZNFkrb6Noch keine Bewertungen
- Voltage Regulation With STATCOMs Modeling, Control and ResultsDokument10 SeitenVoltage Regulation With STATCOMs Modeling, Control and Resultsapi-27465568Noch keine Bewertungen
- Modeling & Simulation of Transient Response of A Armature-Controlled Direct Current Motor Using MATLAB/SIMULINKDokument7 SeitenModeling & Simulation of Transient Response of A Armature-Controlled Direct Current Motor Using MATLAB/SIMULINKOTOMASYON PLCNoch keine Bewertungen
- Work RDDS IEL 11923455 622b3fbedc0c6Dokument6 SeitenWork RDDS IEL 11923455 622b3fbedc0c6LIU LINoch keine Bewertungen
- Fault-Tolerant Operation of An Open-End Winding Five-Phase PMSM Drive With Short-Circuit Inverter FaultDokument11 SeitenFault-Tolerant Operation of An Open-End Winding Five-Phase PMSM Drive With Short-Circuit Inverter Faultmitsui100% (1)
- Simulation of Synchronous Machine in Stability Study For Power SystemDokument6 SeitenSimulation of Synchronous Machine in Stability Study For Power SystemZawmin TunNoch keine Bewertungen
- Generalized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)Dokument6 SeitenGeneralized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)harisimpNoch keine Bewertungen
- Garrett1980Dokument4 SeitenGarrett1980Fernando Ramos PNoch keine Bewertungen
- The Effects of Unbalanced Networks On Synchronous and Asynchronous Machine Transient StabilityDokument9 SeitenThe Effects of Unbalanced Networks On Synchronous and Asynchronous Machine Transient StabilitykfaliNoch keine Bewertungen
- Step by Step Ieee AWESOMEDokument6 SeitenStep by Step Ieee AWESOMESimon Pedro Aguilar RiosNoch keine Bewertungen
- Ques LabDokument93 SeitenQues LabLakshmi ZaharaNoch keine Bewertungen
- Std. 115 - 1995 - IEEE Guide, Test Procedures For Synchronous Machines PartIIDokument108 SeitenStd. 115 - 1995 - IEEE Guide, Test Procedures For Synchronous Machines PartIIflywheel2006100% (2)
- Estimation of Synchronous Machine Parameters by Stand Still Frequency Responses TestingDokument8 SeitenEstimation of Synchronous Machine Parameters by Stand Still Frequency Responses TestingAmr AmrNoch keine Bewertungen
- A Small Dual-Frequency TransformerDokument5 SeitenA Small Dual-Frequency TransformerBruno Koch SchmittNoch keine Bewertungen
- Modal-Based Analysis of Induction Generator Infinite-Bus SystemDokument13 SeitenModal-Based Analysis of Induction Generator Infinite-Bus SystemFilipe RibeiroNoch keine Bewertungen
- Identification of Synchronous Machine ParametersDokument6 SeitenIdentification of Synchronous Machine ParametersHugo CampeloNoch keine Bewertungen
- PSS Lab Manual PDFDokument109 SeitenPSS Lab Manual PDFKvv BapirajuNoch keine Bewertungen
- Continuous Space Vector Modulation For Symmetrical Six-Phase DrivesDokument12 SeitenContinuous Space Vector Modulation For Symmetrical Six-Phase DrivesSherif M. DabourNoch keine Bewertungen
- An Accurate Computer MethodDokument9 SeitenAn Accurate Computer MethodsoumenNoch keine Bewertungen
- Common Mode VoltageDokument8 SeitenCommon Mode VoltageminhducNoch keine Bewertungen
- Clase 04Dokument9 SeitenClase 04Mauricio LeañoNoch keine Bewertungen
- 10 Chapter 4 MM StabilityDokument5 Seiten10 Chapter 4 MM Stabilityashwin_05_kumarNoch keine Bewertungen
- Semlyen 9842 2834Dokument9 SeitenSemlyen 9842 2834Isai SantanaNoch keine Bewertungen
- A Novel Dynamic Voltage Restorer Based On Matrix ConvertersDokument7 SeitenA Novel Dynamic Voltage Restorer Based On Matrix ConvertersAbdulwahid Al-safanyNoch keine Bewertungen
- Simulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelDokument7 SeitenSimulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelPabloNalogowskiNoch keine Bewertungen
- Modelling and Analysis of Squirrel Cage Induction Motor With Leading Reactive Power InjectionDokument28 SeitenModelling and Analysis of Squirrel Cage Induction Motor With Leading Reactive Power InjectionMostafadarwishNoch keine Bewertungen
- Optimization of PI Coefficients in DSTATCOM Nonlinear Controller For Regulating DC Voltage Using Particle Swarm Optimization Dr. Ramesh Kumar, Dilawar Hussain, RuchitaDokument10 SeitenOptimization of PI Coefficients in DSTATCOM Nonlinear Controller For Regulating DC Voltage Using Particle Swarm Optimization Dr. Ramesh Kumar, Dilawar Hussain, RuchitaDavid StuartNoch keine Bewertungen
- Behaviour of Induction Machines Under Fault Conditions - Application of The Instantaneous Symmetrical Components MethodDokument4 SeitenBehaviour of Induction Machines Under Fault Conditions - Application of The Instantaneous Symmetrical Components MethodRajuNoch keine Bewertungen
- Kalyan K. Sen, Schauder, Corporation: Westinghouse ElectricDokument12 SeitenKalyan K. Sen, Schauder, Corporation: Westinghouse ElectrichuskeeNoch keine Bewertungen
- DC Bus Control of Back-to-Back Connected Two-Level PWM Rectifier-Five-Level NPC Voltage Source Inverter To Torque Ripple Reduction in Induction MotorDokument5 SeitenDC Bus Control of Back-to-Back Connected Two-Level PWM Rectifier-Five-Level NPC Voltage Source Inverter To Torque Ripple Reduction in Induction Motorfarid kerroucheNoch keine Bewertungen
- Zhao. Space Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space DecompositionDokument10 SeitenZhao. Space Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space DecompositionAnonymous 1D3dCWNcNoch keine Bewertungen
- Cascading Line Outage Prevention With Multiple UpfcsDokument6 SeitenCascading Line Outage Prevention With Multiple UpfcsomidbarcelonaNoch keine Bewertungen
- Experimental Measurement and Comparison of Common Mode Voltage, Shaft Voltage and The Bearing Current in Two-Level and Multilevel Inverter Fed Induction MotorDokument6 SeitenExperimental Measurement and Comparison of Common Mode Voltage, Shaft Voltage and The Bearing Current in Two-Level and Multilevel Inverter Fed Induction MotordevNoch keine Bewertungen
- Karampuri 2016Dokument6 SeitenKarampuri 2016Kill MongerNoch keine Bewertungen
- Analysis of Electromagnetic Characteristics of Asynchronous Induction MachineDokument4 SeitenAnalysis of Electromagnetic Characteristics of Asynchronous Induction MachineИгор СтерјовскиNoch keine Bewertungen
- Discontinuous SVPWM TechniquesDokument6 SeitenDiscontinuous SVPWM TechniquesAnonymous 1D3dCWNcNoch keine Bewertungen
- Estimating The Parameters of Induction Machines at StandstillDokument5 SeitenEstimating The Parameters of Induction Machines at StandstillVincenzo SansevieroNoch keine Bewertungen
- 29.voltage Flicker Compensation Using STATCOMDokument6 Seiten29.voltage Flicker Compensation Using STATCOMdeepu227Noch keine Bewertungen
- Machine by BhimraDokument5 SeitenMachine by BhimraAnonymous m8oCtJBNoch keine Bewertungen
- Research On SVPWM OkDokument6 SeitenResearch On SVPWM OkAnonymous 1D3dCWNcNoch keine Bewertungen
- Modeling of Electric Arc Furnace & Control Algorithms For Voltage Flicker Mitigation Using DstatcomDokument6 SeitenModeling of Electric Arc Furnace & Control Algorithms For Voltage Flicker Mitigation Using DstatcomChetan KotwalNoch keine Bewertungen
- Transient StabilityDokument26 SeitenTransient StabilitySarojakanti SahooNoch keine Bewertungen
- Fault Analysis - 2019-02-23 (DOE) 2 SlidesDokument120 SeitenFault Analysis - 2019-02-23 (DOE) 2 SlidesCatrina FedericoNoch keine Bewertungen
- Multi-Machine Signal Stability Analysis For Power System: January 2018Dokument6 SeitenMulti-Machine Signal Stability Analysis For Power System: January 2018Mohd Mohsin KhanNoch keine Bewertungen
- Multi-Machine Signal Stability Analysis For Power System: January 2018Dokument6 SeitenMulti-Machine Signal Stability Analysis For Power System: January 2018Mohd Mohsin KhanNoch keine Bewertungen
- The Effect of SVC-FACTS Controller On Power System Oscillation Damping ControlDokument5 SeitenThe Effect of SVC-FACTS Controller On Power System Oscillation Damping ControlKamran KhanNoch keine Bewertungen
- Research Article: Identification and Real Time Speed Control of A Series DC MotorDokument12 SeitenResearch Article: Identification and Real Time Speed Control of A Series DC Motorelectricite industrielleNoch keine Bewertungen
- Synchronous Machine Parameter Measurement: Poles F NDokument9 SeitenSynchronous Machine Parameter Measurement: Poles F NRitesh BhattNoch keine Bewertungen
- On The Stability of Volts-per-Hertz Control For Induction MotorsDokument10 SeitenOn The Stability of Volts-per-Hertz Control For Induction Motorsm tpNoch keine Bewertungen
- Subramanian Malik Synchronous MachineDokument8 SeitenSubramanian Malik Synchronous MachineAlex SanchezNoch keine Bewertungen
- 2652 Submission 3032 2 10 20211231Dokument6 Seiten2652 Submission 3032 2 10 20211231cdkNoch keine Bewertungen
- 2005 - Advanced Robotic Manipulation - OussamaKhatibDokument136 Seiten2005 - Advanced Robotic Manipulation - OussamaKhatibnachoflores214793Noch keine Bewertungen
- Exam in Automatic Control II Reglerteknik II 5hp: Good Luck!Dokument10 SeitenExam in Automatic Control II Reglerteknik II 5hp: Good Luck!Armando MaloneNoch keine Bewertungen
- 4368 Intro 2020Dokument58 Seiten4368 Intro 2020Armando MaloneNoch keine Bewertungen
- READMEDokument1 SeiteREADMEArmando MaloneNoch keine Bewertungen
- 1 Semester - A.Y. 2015/2016: The University of Jordan School of Engineering Department of Mechatronics EngineeringDokument2 Seiten1 Semester - A.Y. 2015/2016: The University of Jordan School of Engineering Department of Mechatronics EngineeringArmando MaloneNoch keine Bewertungen
- En Cours 2017 Lfsab1104Dokument3 SeitenEn Cours 2017 Lfsab1104Armando MaloneNoch keine Bewertungen
- M 243 BGRNDokument2 SeitenM 243 BGRNArmando MaloneNoch keine Bewertungen
- Exam RT1 2011 1 enDokument13 SeitenExam RT1 2011 1 enArmando MaloneNoch keine Bewertungen
- Review: Today's TopicDokument29 SeitenReview: Today's TopicArmando MaloneNoch keine Bewertungen
- PR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Dokument13 SeitenPR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Armando MaloneNoch keine Bewertungen
- Aalborg Universitet: Levron, Yoash Guerrero, Josep M. Beck, YuvalDokument10 SeitenAalborg Universitet: Levron, Yoash Guerrero, Josep M. Beck, YuvalArmando MaloneNoch keine Bewertungen
- 10 1016@j Epsr 2005 05 008 PDFDokument9 Seiten10 1016@j Epsr 2005 05 008 PDFArmando MaloneNoch keine Bewertungen
- Control Systems I Exercise Set 9: Learning Objectives: The Student CanDokument6 SeitenControl Systems I Exercise Set 9: Learning Objectives: The Student CanArmando MaloneNoch keine Bewertungen
- S1705 TransferFunctionDokument24 SeitenS1705 TransferFunctionArmando MaloneNoch keine Bewertungen
- Control Systems I: Lecture 6: Poles and Zeros ReadingsDokument33 SeitenControl Systems I: Lecture 6: Poles and Zeros ReadingsArmando MaloneNoch keine Bewertungen
- Control Systems I: Lecture 3: Time Response Suggested Readings: Astr Om & Murray Ch. 4-5, Guzzella Ch. 4Dokument29 SeitenControl Systems I: Lecture 3: Time Response Suggested Readings: Astr Om & Murray Ch. 4-5, Guzzella Ch. 4Armando MaloneNoch keine Bewertungen
- EE529 Ch0 General Info 2016Dokument9 SeitenEE529 Ch0 General Info 2016Armando MaloneNoch keine Bewertungen
- Lab Report RequirementsDokument1 SeiteLab Report RequirementsArmando MaloneNoch keine Bewertungen
- Moduł Igbt Mg25j2ys40 25a 600v Toshiba DatasheetDokument4 SeitenModuł Igbt Mg25j2ys40 25a 600v Toshiba Datasheetmouelhi karimNoch keine Bewertungen
- Catalogue Power CableDokument28 SeitenCatalogue Power CableAzli FitriNoch keine Bewertungen
- CPCI Designing With Precast Concrete Structural Solutions PDFDokument44 SeitenCPCI Designing With Precast Concrete Structural Solutions PDFMarie Fe Fortuno Bermido100% (1)
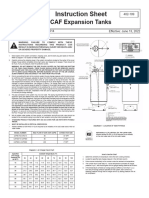
- Taco CAF Expansion Tank Install ManualDokument3 SeitenTaco CAF Expansion Tank Install ManualTEMPNoch keine Bewertungen
- Smart Energy Coordination of Autonomous ResidentiaDokument13 SeitenSmart Energy Coordination of Autonomous ResidentiaAhmed SabriNoch keine Bewertungen
- 11443FR TKSA ShaftAlignmentTools UnlockedDokument8 Seiten11443FR TKSA ShaftAlignmentTools UnlockedRobertoVianaCardosoNoch keine Bewertungen
- Diesel Generator Technical SpecificationDokument3 SeitenDiesel Generator Technical SpecificationAkibNoch keine Bewertungen
- Drive Fundamentals and DC Motor CharacteristicsDokument3 SeitenDrive Fundamentals and DC Motor CharacteristicsJoeNoch keine Bewertungen
- Produced Water Re-InjectionDokument171 SeitenProduced Water Re-InjectionrfarajzadehNoch keine Bewertungen
- Engineering Electromagnetic Fields and Waves: Carl T. A. JohnkDokument5 SeitenEngineering Electromagnetic Fields and Waves: Carl T. A. JohnkMarce MatosNoch keine Bewertungen
- Chapter 5: The First Law of ThermodynamicsDokument54 SeitenChapter 5: The First Law of ThermodynamicsRishabh VaraiyaNoch keine Bewertungen
- Alpha, Beta and Gamma RadiationDokument8 SeitenAlpha, Beta and Gamma RadiationFarhan SadiqueNoch keine Bewertungen
- Lesson 1 Bajo BalanceDokument42 SeitenLesson 1 Bajo BalanceJesus Antonio Mazo GarciaNoch keine Bewertungen
- C 13Dokument5 SeitenC 13مصطفي الغنيمى0% (1)
- Adiabatic Technique FOR Low Power VlsiDokument16 SeitenAdiabatic Technique FOR Low Power VlsiAnamika PancholiNoch keine Bewertungen
- Genius Plus: Electronic Engineering LTDDokument2 SeitenGenius Plus: Electronic Engineering LTDpil;zoNoch keine Bewertungen
- Cat Flash File ReadxrefDokument179 SeitenCat Flash File ReadxrefНиколай Белый89% (9)
- (Walter J. Maciel (Auth.) ) Astrophysics of The IntDokument271 Seiten(Walter J. Maciel (Auth.) ) Astrophysics of The IntLuis Fernando Mejia0% (1)
- Enel Chile Corporate Presentation August 2023Dokument93 SeitenEnel Chile Corporate Presentation August 2023peumayen mediaNoch keine Bewertungen
- Cambridge International Examinations: Chemistry 9701/42 March 2017Dokument12 SeitenCambridge International Examinations: Chemistry 9701/42 March 2017Sumaira AliNoch keine Bewertungen
- Chapter 13 - Chemical EquilibriumDokument52 SeitenChapter 13 - Chemical EquilibriummukhlishNoch keine Bewertungen
- SPE-188863-MS Sweet Spot Mapping in The Montney Tight Gas ReservoirDokument12 SeitenSPE-188863-MS Sweet Spot Mapping in The Montney Tight Gas ReservoirarispriyatmonoNoch keine Bewertungen
- Pump CalculationsDokument20 SeitenPump CalculationsPRATIK P. BHOIR50% (2)
- 三菱S4L2发动机零件图册Dokument111 Seiten三菱S4L2发动机零件图册Baiuliang BaiuliangNoch keine Bewertungen
- Washing Machine: Service ManualDokument41 SeitenWashing Machine: Service Manualimagex5Noch keine Bewertungen
- Project Zeroth Review PPT TemplateDokument8 SeitenProject Zeroth Review PPT Templatepubg EdictsNoch keine Bewertungen
- Manual Qrod PDFDokument17 SeitenManual Qrod PDFEzequiel GuerreroNoch keine Bewertungen
- Four Bar Linkage Knee Analysis: by Michael P. Greene, B.S., M.E., C.P.ODokument10 SeitenFour Bar Linkage Knee Analysis: by Michael P. Greene, B.S., M.E., C.P.ObaksoNoch keine Bewertungen
- OIDA Improved CarbonizerDokument14 SeitenOIDA Improved CarbonizerRicardo F. OrgeNoch keine Bewertungen
- Kashimali Aluminium - Karnataka - Anodizing Plant - 18.11.2023Dokument7 SeitenKashimali Aluminium - Karnataka - Anodizing Plant - 18.11.2023Manjunath NemagoudarNoch keine Bewertungen