Das könnte Ihnen auch gefallen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Power System ProtectionDokument4 SeitenPower System Protectionmarinjay03Noch keine Bewertungen
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionNoch keine Bewertungen
- INSTRUMNT AssignmentDokument7 SeitenINSTRUMNT AssignmentShahab HassanNoch keine Bewertungen
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionBewertung: 5 von 5 Sternen5/5 (1)
- Experiment No: 1 19bee069 Date: 20/01/2022 Aim: To Determine Magnetization Characteristics of A Given Current TransformerDokument11 SeitenExperiment No: 1 19bee069 Date: 20/01/2022 Aim: To Determine Magnetization Characteristics of A Given Current TransformerR.D Sutariya100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Fundamentals of Transformer ProtectionDokument37 SeitenFundamentals of Transformer ProtectionVikas Oza100% (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesVon EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNoch keine Bewertungen
- Chapter 3 - CT&VT - Part 1Dokument63 SeitenChapter 3 - CT&VT - Part 1zhafran100% (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNoch keine Bewertungen
- ITMF 2013 07 2 Predl ENUDokument8 SeitenITMF 2013 07 2 Predl ENUbcqbaoNoch keine Bewertungen
- 3.15& 5 MVA Power Transformer TestingDokument65 Seiten3.15& 5 MVA Power Transformer TestingAmit Kumar SinghNoch keine Bewertungen
- Assignment-Iv: (I) Operating Time of Feeder RelayDokument4 SeitenAssignment-Iv: (I) Operating Time of Feeder RelayPrasenjit Dey100% (1)
- Corrientes de Saturacion de TransformadorDokument16 SeitenCorrientes de Saturacion de TransformadorCarlos CuellarNoch keine Bewertungen
- Applying CTs With Digital Ground RelaysDokument9 SeitenApplying CTs With Digital Ground RelaysAriesFranandaPanjaitanNoch keine Bewertungen
- Current Transformer Errors and Transformer InrushDokument24 SeitenCurrent Transformer Errors and Transformer InrushFernandoMartínIranzoNoch keine Bewertungen
- ELX303 Exam SolutionsDokument27 SeitenELX303 Exam SolutionsNadeesha BandaraNoch keine Bewertungen
- Protection SystemDokument153 SeitenProtection SystemArinder Singh100% (1)
- Specification of CTS:: Saturated Values of Rated Burden AreDokument25 SeitenSpecification of CTS:: Saturated Values of Rated Burden ArePranendu MaitiNoch keine Bewertungen
- CT Lead LengthsDokument5 SeitenCT Lead LengthsKali Muthu100% (1)
- Busbar Differential Stabllity Test Procedure PDFDokument8 SeitenBusbar Differential Stabllity Test Procedure PDFMoinullah Khan Ateeq100% (1)
- Uc3842 Provides Low-Cost Current-Mode Control: Application NoteDokument16 SeitenUc3842 Provides Low-Cost Current-Mode Control: Application NoteLeonardo Ortiz100% (1)
- SheetsDokument9 SeitenSheetsnassim.197950% (2)
- Ece Vii Power Electronics (10ec73) AssignmentDokument6 SeitenEce Vii Power Electronics (10ec73) AssignmentThomas PriceNoch keine Bewertungen
- ANGEN - EN006 Current Transformer Selection For VAMP Series Overcurrent and Differential Relays PDFDokument8 SeitenANGEN - EN006 Current Transformer Selection For VAMP Series Overcurrent and Differential Relays PDFRicardo BozoNoch keine Bewertungen
- 449 261 FDokument4 Seiten449 261 Fqais652002Noch keine Bewertungen
- APPENDIX V GUIDELINES FOR RELAY SETTINGS AT TRACTION SUBSTATIONS AND SECTIONING POSTS The Following Guidelines May Be Followed ForDokument17 SeitenAPPENDIX V GUIDELINES FOR RELAY SETTINGS AT TRACTION SUBSTATIONS AND SECTIONING POSTS The Following Guidelines May Be Followed ForLora BishopNoch keine Bewertungen
- UC3842 Inside SchematicsDokument17 SeitenUC3842 Inside Schematicsp.c100% (1)
- Electromagnetic Fields Temperature: BurdenDokument2 SeitenElectromagnetic Fields Temperature: BurdenBashaNoch keine Bewertungen
- Mod 2 Lec 9 VT TutorialDokument19 SeitenMod 2 Lec 9 VT Tutorialjck07Noch keine Bewertungen
- Symmetrical FaultsDokument11 SeitenSymmetrical FaultsNeha RajputNoch keine Bewertungen
- Current and Voltage Transformers and Their ApplicationsDokument17 SeitenCurrent and Voltage Transformers and Their ApplicationsAdel HassanNoch keine Bewertungen
- Application Note 106 February 2007 Instrumentation Circuitry Using RMS-to-DC ConvertersDokument20 SeitenApplication Note 106 February 2007 Instrumentation Circuitry Using RMS-to-DC ConvertersHahdNoch keine Bewertungen
- Maintenance of CT&PTDokument24 SeitenMaintenance of CT&PTajaynmenon100% (2)
- Current Transformer: Adding Citations To Reliable SourcesDokument6 SeitenCurrent Transformer: Adding Citations To Reliable SourcesraviNoch keine Bewertungen
- EEE3100S 2022 Tutorial 10 Memo - Power System Protection - KOADokument8 SeitenEEE3100S 2022 Tutorial 10 Memo - Power System Protection - KOAStalin KosterNoch keine Bewertungen
- CVT Secondary Sub-Circuits (Var Control)Dokument2 SeitenCVT Secondary Sub-Circuits (Var Control)RudanekNoch keine Bewertungen
- DiDokument6 SeitenDipani256Noch keine Bewertungen
- Varistor Calculations (ID 16263)Dokument8 SeitenVaristor Calculations (ID 16263)bspassov6Noch keine Bewertungen
- Current Transformer (CT)Dokument16 SeitenCurrent Transformer (CT)Jay RanvirNoch keine Bewertungen
- AN1003 Teccor ThyristorsDokument9 SeitenAN1003 Teccor ThyristorsmtcquigNoch keine Bewertungen
- Pertemuan 7. Unit Protection (T. DAVIES) Protection of Industrial Power SystemsDokument24 SeitenPertemuan 7. Unit Protection (T. DAVIES) Protection of Industrial Power Systemswijayaroni363Noch keine Bewertungen
- Selection of Current TrafoDokument18 SeitenSelection of Current TrafoSuraj KumarNoch keine Bewertungen
- CT and PT: Chapter 4. Instrument TransformersDokument24 SeitenCT and PT: Chapter 4. Instrument TransformersBio DebatarajaNoch keine Bewertungen
- Uc3842 - Current-Mode ControlDokument16 SeitenUc3842 - Current-Mode ControlGiovani AkNoch keine Bewertungen
- Ece-Vii-Power Electronics (10ec73) - Assignment PDFDokument6 SeitenEce-Vii-Power Electronics (10ec73) - Assignment PDFAdarsh S Shettigar100% (1)
- Current Transformer f2Dokument61 SeitenCurrent Transformer f2MohammedSaadaniHassani100% (3)
- UC3845 Technical ExplanationDokument15 SeitenUC3845 Technical ExplanationankurmalviyaNoch keine Bewertungen
- Switchyard (2) PDFDokument7 SeitenSwitchyard (2) PDFmyfile_rakesh0% (1)
- 07 Current Transformer Applications#Dokument9 Seiten07 Current Transformer Applications#aimizaNoch keine Bewertungen
- Current TransformerDokument9 SeitenCurrent Transformersonu200186100% (1)
- Power Electronics For Utility Applications (EE529) Chapter 2: Static Shunt CompensatorsDokument16 SeitenPower Electronics For Utility Applications (EE529) Chapter 2: Static Shunt CompensatorsdebealNoch keine Bewertungen
- Static Var CompensatorDokument29 SeitenStatic Var CompensatorCarlos Fabian GallardoNoch keine Bewertungen
- An 60034Dokument12 SeitenAn 60034ClenaNoch keine Bewertungen
- Phone Charger SchematicDokument6 SeitenPhone Charger Schematicyudi_sibaraniNoch keine Bewertungen
- Conventional Paper-II-2011 Part-1ADokument6 SeitenConventional Paper-II-2011 Part-1ASoumyabrataPatraNoch keine Bewertungen
- Transient Performance and Stability Analysis of Grid Connected Power SystemDokument24 SeitenTransient Performance and Stability Analysis of Grid Connected Power SystemSarat Kumar SahooNoch keine Bewertungen
- MV Design Guide Design RulesDokument34 SeitenMV Design Guide Design RulesAhmed IbraheemNoch keine Bewertungen
- Capacitance MeasurementDokument14 SeitenCapacitance MeasurementKarthick ThangaveluNoch keine Bewertungen
- Starter Kit For Arduino (User Manual)Dokument86 SeitenStarter Kit For Arduino (User Manual)mohiroshiNoch keine Bewertungen
- JMCC17EGAT SpecialTopic TL InspectionTechnologyRev3ReduceDokument50 SeitenJMCC17EGAT SpecialTopic TL InspectionTechnologyRev3ReduceSyafrizal SyafrizalNoch keine Bewertungen
- System Performance - EGAT PDFDokument40 SeitenSystem Performance - EGAT PDFSyafrizal SyafrizalNoch keine Bewertungen
- System Performance - EGAT PDFDokument40 SeitenSystem Performance - EGAT PDFSyafrizal SyafrizalNoch keine Bewertungen
- Tutorial L298N Driver MotorDokument5 SeitenTutorial L298N Driver MotorHairul Anam SNoch keine Bewertungen
- Rphdoc e Z 04Dokument75 SeitenRphdoc e Z 04ThiagoPinheiroNoch keine Bewertungen
- Resume IndramayuDokument3 SeitenResume IndramayuSyafrizal SyafrizalNoch keine Bewertungen
- Power SwingDokument66 SeitenPower SwingAshish Gupta100% (5)
- ABB B.G. Controlled Switching Ed2Dokument58 SeitenABB B.G. Controlled Switching Ed2gosalhs9395100% (1)
- PCS-9671 Transformer Differential Relay - V1.00Dokument32 SeitenPCS-9671 Transformer Differential Relay - V1.00Arief Sandy AnggoroNoch keine Bewertungen
- Austin Hughes and Bill Drury (Auth.) Electric Motors and Drives. Fundamentals, Types and Applications 2013Dokument123 SeitenAustin Hughes and Bill Drury (Auth.) Electric Motors and Drives. Fundamentals, Types and Applications 2013megamaster2010Noch keine Bewertungen
- Distance Relay FundamentalsDokument20 SeitenDistance Relay FundamentalsSyed Muhammad Munavvar HussainNoch keine Bewertungen
- Dranetz HDPQ User GuideDokument312 SeitenDranetz HDPQ User GuideSyafrizal SyafrizalNoch keine Bewertungen
- PCS-902 Transmission Line Protection - V1.01Dokument54 SeitenPCS-902 Transmission Line Protection - V1.01Syafrizal SyafrizalNoch keine Bewertungen
- Report - Power Plant and Transmission System - FinalDokument36 SeitenReport - Power Plant and Transmission System - Final1453hNoch keine Bewertungen
- CSC 306 Generator Protection Ied Technical Application ManualDokument302 SeitenCSC 306 Generator Protection Ied Technical Application ManualSyafrizal Syafrizal100% (1)
- Product Information DIGSI4 V4 90 PDFDokument70 SeitenProduct Information DIGSI4 V4 90 PDFShid JullNoch keine Bewertungen
- Transformer ProtectionDokument6 SeitenTransformer Protectionapi-3743746100% (2)
- CSC-101 Line Distance Protection IED Technical Application ManualDokument118 SeitenCSC-101 Line Distance Protection IED Technical Application ManualSyafrizal Syafrizal100% (2)
- A Guide To Digital Fault Recording Event Analysis ERLPhase GATech2010Dokument17 SeitenA Guide To Digital Fault Recording Event Analysis ERLPhase GATech2010Vishwanath TodurkarNoch keine Bewertungen
- OC EF RLY SET Chap9-122-151Dokument30 SeitenOC EF RLY SET Chap9-122-151Falulus SalamNoch keine Bewertungen
- Application Protection of Power System ArevaDokument147 SeitenApplication Protection of Power System ArevaSyafrizal Syafrizal100% (1)
- Iec60076-1 (Ed2.1) en D PDFDokument7 SeitenIec60076-1 (Ed2.1) en D PDFSyafrizal SyafrizalNoch keine Bewertungen
- Power AssignmentDokument8 SeitenPower AssignmentHaseeb AdilNoch keine Bewertungen
- Electrical Engineering Multiple Choice Questions: SF6 Free SwitchgearDokument32 SeitenElectrical Engineering Multiple Choice Questions: SF6 Free SwitchgearVikash SinghNoch keine Bewertungen
- Legrand RCCB and MCBDokument78 SeitenLegrand RCCB and MCBKelly chatNoch keine Bewertungen
- 4188-424 - Xenex 2 Installation and CommissioningDokument24 Seiten4188-424 - Xenex 2 Installation and CommissioningRabie MahmoudNoch keine Bewertungen
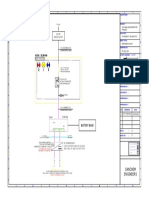
- 10 KW SLD UpdatedDokument1 Seite10 KW SLD UpdatedKartik saxenaNoch keine Bewertungen
- CSC-326 Transformer Protection IED Technical Application Manual (0SF.450.085E) - V1.01Dokument315 SeitenCSC-326 Transformer Protection IED Technical Application Manual (0SF.450.085E) - V1.01duonzaNoch keine Bewertungen
- Triton Relays Normally Open Vs Normally Closed PDFDokument2 SeitenTriton Relays Normally Open Vs Normally Closed PDFMariane LopesNoch keine Bewertungen
- 1.7 Description of Logic Nodes: Programmable Logic P54X/En Pl/K74 Micom P543, P544, P545, P546 (PL) 7-15Dokument32 Seiten1.7 Description of Logic Nodes: Programmable Logic P54X/En Pl/K74 Micom P543, P544, P545, P546 (PL) 7-15pgcilNoch keine Bewertungen
- Appl 26 Busbar Protection by Reverse Interlocking en PDFDokument2 SeitenAppl 26 Busbar Protection by Reverse Interlocking en PDFsubhashNoch keine Bewertungen
- Bus Bar, CT, VT, LA, PLCCDokument49 SeitenBus Bar, CT, VT, LA, PLCCpriyajsinghNoch keine Bewertungen
- Pradipfront PageDokument5 SeitenPradipfront PageDebomitra SinhaNoch keine Bewertungen
- EEP - Standard Tripping Schemes and Trip Circuit Supervision Schemes For MV SwitchgearDokument12 SeitenEEP - Standard Tripping Schemes and Trip Circuit Supervision Schemes For MV SwitchgearSugeng SumarnoNoch keine Bewertungen
- Bee - Unit IV Question BankDokument1 SeiteBee - Unit IV Question BankTejaswini SarwadeNoch keine Bewertungen
- MPPT 2420 HC SchematicDokument6 SeitenMPPT 2420 HC SchematicAbdul WahabNoch keine Bewertungen
- Schéma Électrique TORNADO HP 3064 400V - 30050353 - en COMM. 35-20Dokument101 SeitenSchéma Électrique TORNADO HP 3064 400V - 30050353 - en COMM. 35-20Alexandre FretisseNoch keine Bewertungen
- NTPC Anta ElectricalDokument35 SeitenNTPC Anta ElectricalVikas RawalNoch keine Bewertungen
- 30-SCR Triac Triggers PDFDokument76 Seiten30-SCR Triac Triggers PDFrian annasNoch keine Bewertungen
- IEC 60364-4-42 Ed 3Dokument12 SeitenIEC 60364-4-42 Ed 3Сергей ОблакевичNoch keine Bewertungen
- Record Plus Catalogue 9 RD5 RD6 RCD RelayDokument2 SeitenRecord Plus Catalogue 9 RD5 RD6 RCD RelayJosett LPNoch keine Bewertungen
- Mechanism Retrofi Ts For High Voltage Circuit Breakers & Related SwitchgearDokument2 SeitenMechanism Retrofi Ts For High Voltage Circuit Breakers & Related SwitchgearFakhri HakimNoch keine Bewertungen
- Protective RelayingDokument4 SeitenProtective RelayingguntadiNoch keine Bewertungen
- Adaptive Protection Scheme For Smart GridsDokument6 SeitenAdaptive Protection Scheme For Smart GridsMiguel QuispeNoch keine Bewertungen
- ABB Latest Price List 2024Dokument271 SeitenABB Latest Price List 2024WOW ElectricalsNoch keine Bewertungen
- Specification For Transformer: ANSI C57.12-01Dokument1 SeiteSpecification For Transformer: ANSI C57.12-01Charlie MendozaNoch keine Bewertungen
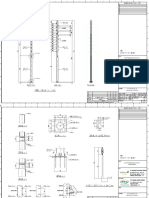
- STEEL POLE 14M 350 DanDokument2 SeitenSTEEL POLE 14M 350 DanJuragan IwalNoch keine Bewertungen
- Main Components of A CircuitDokument2 SeitenMain Components of A Circuitshaik jilanNoch keine Bewertungen
- MBR20B100FCTHDokument2 SeitenMBR20B100FCTHcarlos vNoch keine Bewertungen
- Requirements For Transmission Connected Facilities 10-03-2016Dokument76 SeitenRequirements For Transmission Connected Facilities 10-03-2016emerynhoNoch keine Bewertungen
- Cpa Tcig Tin 036 Issue A 130529Dokument2 SeitenCpa Tcig Tin 036 Issue A 130529Tarek HareedyNoch keine Bewertungen
- Specification Guide M-T-M UniversalDokument4 SeitenSpecification Guide M-T-M UniversalCharles RobiansyahNoch keine Bewertungen
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsVon EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNoch keine Bewertungen
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterVon EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterNoch keine Bewertungen
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionBewertung: 5 von 5 Sternen5/5 (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesVon EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesBewertung: 4.5 von 5 Sternen4.5/5 (21)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!Von EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!Noch keine Bewertungen
- Renewable Energy: A Very Short IntroductionVon EverandRenewable Energy: A Very Short IntroductionBewertung: 4.5 von 5 Sternen4.5/5 (12)
- A Pathway to Decarbonise the Shipping Sector by 2050Von EverandA Pathway to Decarbonise the Shipping Sector by 2050Noch keine Bewertungen
- Shorting the Grid: The Hidden Fragility of Our Electric GridVon EverandShorting the Grid: The Hidden Fragility of Our Electric GridBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsVon EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionNoch keine Bewertungen
- Nuclear Energy in the 21st Century: World Nuclear University PressVon EverandNuclear Energy in the 21st Century: World Nuclear University PressBewertung: 4.5 von 5 Sternen4.5/5 (3)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceVon EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNoch keine Bewertungen
- Heat Transfer Engineering: Fundamentals and TechniquesVon EverandHeat Transfer Engineering: Fundamentals and TechniquesBewertung: 4 von 5 Sternen4/5 (1)
- Practical Power Distribution for IndustryVon EverandPractical Power Distribution for IndustryBewertung: 2.5 von 5 Sternen2.5/5 (2)
- Practical Reservoir Engineering and CharacterizationVon EverandPractical Reservoir Engineering and CharacterizationBewertung: 4.5 von 5 Sternen4.5/5 (3)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successVon EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsVon EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNoch keine Bewertungen
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsVon EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNoch keine Bewertungen
- Renewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksVon EverandRenewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksNoch keine Bewertungen
- An Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksVon EverandAn Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksNoch keine Bewertungen
- Global Landscape of Renewable Energy FinanceVon EverandGlobal Landscape of Renewable Energy FinanceNoch keine Bewertungen
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerVon EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNoch keine Bewertungen
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Von EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Noch keine Bewertungen
- Idaho Falls: The Untold Story of America's First Nuclear AccidentVon EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentBewertung: 4.5 von 5 Sternen4.5/5 (21)
- Electric Motors and Drives: Fundamentals, Types and ApplicationsVon EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsBewertung: 4.5 von 5 Sternen4.5/5 (12)
- Grid-Scale Energy Storage Systems and ApplicationsVon EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNoch keine Bewertungen
- Practical Methods for Analysis and Design of HV Installation Grounding SystemsVon EverandPractical Methods for Analysis and Design of HV Installation Grounding SystemsBewertung: 4.5 von 5 Sternen4.5/5 (2)