Das könnte Ihnen auch gefallen
- Competitive ProgrammingDokument24 SeitenCompetitive Programmingfrozen3592100% (1)
- Model Development and Loads Analysis of An Offshore Wind Turbine On A Tension Leg Platform, With A Comparison To Other Floating Turbine ConceptsDokument129 SeitenModel Development and Loads Analysis of An Offshore Wind Turbine On A Tension Leg Platform, With A Comparison To Other Floating Turbine ConceptsUbani Obinna RanksNoch keine Bewertungen
- Chapter 3 SolutionsDokument61 SeitenChapter 3 SolutionsKleilson Chagas71% (24)
- Dynamic ProgrammingDokument110 SeitenDynamic ProgrammingJatin BindalNoch keine Bewertungen
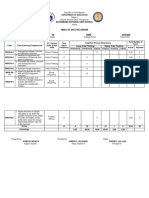
- Tos Math 8 3RD QuarterDokument2 SeitenTos Math 8 3RD Quarterrmm041550% (2)
- Adjoint Tutorial PDFDokument6 SeitenAdjoint Tutorial PDFPeter AngeloNoch keine Bewertungen
- Chapter 3-Fuzzy Logic ControlDokument67 SeitenChapter 3-Fuzzy Logic ControlSileshNoch keine Bewertungen
- The Primitive Recursive FunctionsDokument13 SeitenThe Primitive Recursive FunctionsWaldo Gómez AlvarezNoch keine Bewertungen
- Practical Implementation of A Dependently Typed Functional Programming LanguageDokument270 SeitenPractical Implementation of A Dependently Typed Functional Programming LanguageEdwin Brady100% (1)
- Prendre RDV Impression PDFDokument1 SeitePrendre RDV Impression PDFMarcio DíazNoch keine Bewertungen
- Advanced Artificial Intelligence (Datalog, Part II) : Marco Maratea DIBRIS, University of Genoa, Italy A.Y. 2020/21Dokument28 SeitenAdvanced Artificial Intelligence (Datalog, Part II) : Marco Maratea DIBRIS, University of Genoa, Italy A.Y. 2020/21mulettoNoch keine Bewertungen
- The Classic Multiplication Algorithm: Deduction InductionDokument6 SeitenThe Classic Multiplication Algorithm: Deduction InductioninfotecgNoch keine Bewertungen
- Introduction To Nonlinear Optimization and Optimality Conditions FoDokument46 SeitenIntroduction To Nonlinear Optimization and Optimality Conditions FoChad MckernanNoch keine Bewertungen
- Efficient Qos Routing: Stavroula Siachalou, Leonidas GeorgiadisDokument10 SeitenEfficient Qos Routing: Stavroula Siachalou, Leonidas GeorgiadisTombomora Anjaravelo ChancelinNoch keine Bewertungen
- Fundamental of Computer Science Practical FileDokument63 SeitenFundamental of Computer Science Practical FileGaurav ThakurNoch keine Bewertungen
- 2.datalog Part II RevisedDokument28 Seiten2.datalog Part II RevisedmulettoNoch keine Bewertungen
- REPORT - Gradient Based OptimizationDokument2 SeitenREPORT - Gradient Based Optimizationabhay4meggiNoch keine Bewertungen
- CSC 429 Mid Fall 14Dokument8 SeitenCSC 429 Mid Fall 14SAINoch keine Bewertungen
- Idoc - Pub - Ccodechamp Com C Program of Newton Raphson Method C Code Cha PDFDokument7 SeitenIdoc - Pub - Ccodechamp Com C Program of Newton Raphson Method C Code Cha PDFPrincess NobleNoch keine Bewertungen
- Miranda QuadratureDokument19 SeitenMiranda QuadratureAlbert RofiNoch keine Bewertungen
- A Separable Approximation Dynamic Programming Algorithm For Economic Dispatch With Transmission LossesDokument10 SeitenA Separable Approximation Dynamic Programming Algorithm For Economic Dispatch With Transmission Lossesiman MHNavehNoch keine Bewertungen
- CO1003 Chapter 6 FunctionsDokument50 SeitenCO1003 Chapter 6 FunctionsBảo Tín TrầnNoch keine Bewertungen
- RPubs - How Do I Get P-Values and Critical Values From RDokument9 SeitenRPubs - How Do I Get P-Values and Critical Values From Rscrib@pym.clNoch keine Bewertungen
- 5 SME1013 Operators&ExpressionsDokument19 Seiten5 SME1013 Operators&ExpressionsMuhammad Hazim Putra AzmiNoch keine Bewertungen
- Unit 4 - Theory of Computation - WWW - Rgpvnotes.in PDFDokument9 SeitenUnit 4 - Theory of Computation - WWW - Rgpvnotes.in PDFNikita KotwalNoch keine Bewertungen
- SushillabDokument16 SeitenSushillabLord GamerNoch keine Bewertungen
- Unit - VDokument22 SeitenUnit - VJit Agg100% (1)
- Polynomial Evaluation Over Finite Fields: New Algorithms and Complexity BoundsDokument12 SeitenPolynomial Evaluation Over Finite Fields: New Algorithms and Complexity BoundsJaime SalguerroNoch keine Bewertungen
- Supervidsed AlgorithmDokument19 SeitenSupervidsed AlgorithmMittu RajareddyNoch keine Bewertungen
- Lecture 4 2 NopauseeDokument51 SeitenLecture 4 2 NopauseeTRNoch keine Bewertungen
- Unit 4 - Theory of Computation - WWW - Rgpvnotes.inDokument14 SeitenUnit 4 - Theory of Computation - WWW - Rgpvnotes.inRajat KushwahNoch keine Bewertungen
- Pennon A Generalized Augmented Lagrangian Method For Semidefinite ProgrammingDokument20 SeitenPennon A Generalized Augmented Lagrangian Method For Semidefinite ProgrammingMahmoudNoch keine Bewertungen
- Unit1 IntroductionDokument21 SeitenUnit1 Introduction321126510L03 kurmapu dharaneeswarNoch keine Bewertungen
- S22aac cl06Dokument4 SeitenS22aac cl06Khhg AgddsNoch keine Bewertungen
- 【PPT】Conservative policy iterationDokument75 Seiten【PPT】Conservative policy iteration杨烨峰Noch keine Bewertungen
- Iv. Lesson Proper: Applications Development and Emerging TechnologiesDokument9 SeitenIv. Lesson Proper: Applications Development and Emerging TechnologiesAestheticNoch keine Bewertungen
- Genetic Programming SLidesDokument84 SeitenGenetic Programming SLidesMoiz khanNoch keine Bewertungen
- 28SDokument17 Seiten28SJulio BarreraNoch keine Bewertungen
- PythonDokument22 SeitenPythonandiksribdNoch keine Bewertungen
- Expt 5Dokument20 SeitenExpt 5Amisha SharmaNoch keine Bewertungen
- Read Me Simplex MethodDokument3 SeitenRead Me Simplex MethodRamón Quezada AbinaderNoch keine Bewertungen
- Computing Roots Modulo PDokument3 SeitenComputing Roots Modulo PoliverjohnboydNoch keine Bewertungen
- InfSec-4-Public Key EncryptionDokument28 SeitenInfSec-4-Public Key EncryptionThịnh Nguyễn GiaNoch keine Bewertungen
- Data-Flow Analysis: Theoretical Foundations - : Y.N. SrikantDokument17 SeitenData-Flow Analysis: Theoretical Foundations - : Y.N. SrikantDilip TheLipNoch keine Bewertungen
- Fixed-Point Partial Recursion in Coq: Joint Work With Yves BertotDokument32 SeitenFixed-Point Partial Recursion in Coq: Joint Work With Yves Bertotwicko3Noch keine Bewertungen
- Math10282 Ex05 - An R SessionDokument6 SeitenMath10282 Ex05 - An R SessiondeimanteNoch keine Bewertungen
- Introduction To Differentiable Physics - Physics-Based Deep LearningDokument8 SeitenIntroduction To Differentiable Physics - Physics-Based Deep LearningimsgsattiNoch keine Bewertungen
- CSCI 8080 Design and Analysis of Algorithms: Greedy AlgorithmDokument4 SeitenCSCI 8080 Design and Analysis of Algorithms: Greedy AlgorithmashwathyashokanNoch keine Bewertungen
- CS-DAA Two Marks QuestionDokument12 SeitenCS-DAA Two Marks QuestionPankaj SainiNoch keine Bewertungen
- Mid Sem Python AnswersDokument8 SeitenMid Sem Python AnswersJai BondNoch keine Bewertungen
- C Ci (P) : Ex - No: Date: Economic Dispatch Problem AimDokument7 SeitenC Ci (P) : Ex - No: Date: Economic Dispatch Problem AimsasitsnNoch keine Bewertungen
- Ada 4Dokument3 SeitenAda 4vipul jhaNoch keine Bewertungen
- Extra Coding Statements TCSDokument54 SeitenExtra Coding Statements TCSJeevan Sai MaddiNoch keine Bewertungen
- Formal Verification of The Ricart-Agrawala AlgorithmDokument11 SeitenFormal Verification of The Ricart-Agrawala AlgorithmShubham ChaurasiaNoch keine Bewertungen
- Dynamic ProgrammingDokument35 SeitenDynamic ProgrammingMuhammad JunaidNoch keine Bewertungen
- The General Theory of Short-TeDokument14 SeitenThe General Theory of Short-TeEmanuel PavlovićNoch keine Bewertungen
- SME1013 CFundamentalsDokument15 SeitenSME1013 CFundamentalskhalil alhatabNoch keine Bewertungen
- Bayesian Decision Theory and Learning: Jayanta Mukhopadhyay Dept. of Computer Science and EnggDokument56 SeitenBayesian Decision Theory and Learning: Jayanta Mukhopadhyay Dept. of Computer Science and EnggUtkarsh PatelNoch keine Bewertungen
- Approximation Algorithms For Combinatorial Multicriteria Optimization ProblemsDokument26 SeitenApproximation Algorithms For Combinatorial Multicriteria Optimization Problemsbb_sportsmanNoch keine Bewertungen
- RSA Encryption Packet 2Dokument8 SeitenRSA Encryption Packet 2ant314159265Noch keine Bewertungen
- Data Structures IntroductionDokument15 SeitenData Structures IntroductionminutesacademyofficialNoch keine Bewertungen
- Grasp QapDokument13 SeitenGrasp QapAdrian VizireanuNoch keine Bewertungen
- Demo BsearchDokument9 SeitenDemo BsearchsunilsmcsNoch keine Bewertungen
- SC 2 LeDokument19 SeitenSC 2 LeMarcio DíazNoch keine Bewertungen
- Important StuffDokument10 SeitenImportant StuffMarcio DíazNoch keine Bewertungen
- PLDPN SlidesDokument2 SeitenPLDPN SlidesMarcio DíazNoch keine Bewertungen
- Prediction, Learning, and Games (2006)Dokument407 SeitenPrediction, Learning, and Games (2006)Trịnh Hữu TâmNoch keine Bewertungen
- Demo BsearchDokument1 SeiteDemo BsearchMarcio DíazNoch keine Bewertungen
- Razavi Niloofar 201406 PHD ThesisDokument207 SeitenRazavi Niloofar 201406 PHD ThesisMarcio DíazNoch keine Bewertungen
- An Auntomata TheoreticalDokument10 SeitenAn Auntomata TheoreticalMarcio DíazNoch keine Bewertungen
- Pe Pe Pere Pe PeDokument27 SeitenPe Pe Pere Pe PeMarcio DíazNoch keine Bewertungen
- Race Checking by Context InferenceDokument10 SeitenRace Checking by Context InferenceMarcio DíazNoch keine Bewertungen
- On SequentializingDokument17 SeitenOn SequentializingMarcio DíazNoch keine Bewertungen
- Esto Es Una CagadaDokument176 SeitenEsto Es Una CagadaMarcio DíazNoch keine Bewertungen
- Frama C Mthread Manual PDFDokument37 SeitenFrama C Mthread Manual PDFMarcio DíazNoch keine Bewertungen
- Formal Certification of Code-Based Cryptographic Proofs: Gilles Barthe Benjamin GR Egoire Santiago ZanellaDokument12 SeitenFormal Certification of Code-Based Cryptographic Proofs: Gilles Barthe Benjamin GR Egoire Santiago ZanellaMarcio DíazNoch keine Bewertungen
- Writing A (Computer Science) Paper: Jakob E. BardramDokument29 SeitenWriting A (Computer Science) Paper: Jakob E. BardramMarcio DíazNoch keine Bewertungen
- Moving Arrows and Four Model Checking Results: Carlos Areces, Raul Fervari & Guillaume HoffmannDokument49 SeitenMoving Arrows and Four Model Checking Results: Carlos Areces, Raul Fervari & Guillaume HoffmannMarcio DíazNoch keine Bewertungen
- HooletDokument10 SeitenHooletMarcio DíazNoch keine Bewertungen
- Common KnowledgeDokument47 SeitenCommon KnowledgeMarcio DíazNoch keine Bewertungen
- Bucketed PatcheDokument10 SeitenBucketed PatcheMarcio DíazNoch keine Bewertungen
- Can OWL and Logic Programming Live Together Happily Ever After?Dokument14 SeitenCan OWL and Logic Programming Live Together Happily Ever After?Marcio DíazNoch keine Bewertungen
- The Algorithmicx PackageDokument28 SeitenThe Algorithmicx PackageJeff PrattNoch keine Bewertungen
- Learning Programs As Logical QueriesDokument10 SeitenLearning Programs As Logical QueriesMarcio DíazNoch keine Bewertungen
- Program DemoDokument6 SeitenProgram DemoMarcio DíazNoch keine Bewertungen
- ChellasDokument34 SeitenChellasMarcio DíazNoch keine Bewertungen
- The Self-Organizing Map (Kohonen)Dokument17 SeitenThe Self-Organizing Map (Kohonen)Marcio DíazNoch keine Bewertungen
- Games 01 00478Dokument49 SeitenGames 01 00478Marcio DíazNoch keine Bewertungen
- Emilio RodriguezDokument5 SeitenEmilio RodriguezMarcio DíazNoch keine Bewertungen
- SpassDokument34 SeitenSpassMarcio DíazNoch keine Bewertungen
- Project Management: CrashingDokument22 SeitenProject Management: CrashingRushi JivaniNoch keine Bewertungen
- Jeopardy ReviewDokument57 SeitenJeopardy ReviewBarbara_Amador_2011Noch keine Bewertungen
- Machine Model REGC - BDokument2 SeitenMachine Model REGC - BManuelNoch keine Bewertungen
- Ai ML MCQ CombinedDokument54 SeitenAi ML MCQ CombinedAbhinav JoshiNoch keine Bewertungen
- DocxDokument16 SeitenDocxDeepika PadukoneNoch keine Bewertungen
- Final Examination: 1 Rules (Requires Student Signature!)Dokument9 SeitenFinal Examination: 1 Rules (Requires Student Signature!)Hernan Kennedy Ricaldi PorrasNoch keine Bewertungen
- Introduccion: Encuentre La Segunda Derivada de Las Funciones Dadas: 1Dokument3 SeitenIntroduccion: Encuentre La Segunda Derivada de Las Funciones Dadas: 1Miguel BautistaNoch keine Bewertungen
- Lesson 1: Exponential Notation: Student OutcomesDokument9 SeitenLesson 1: Exponential Notation: Student OutcomesDiyames RamosNoch keine Bewertungen
- Fig 2.1 Three Leg Topology of Shunt Active Power FilterDokument19 SeitenFig 2.1 Three Leg Topology of Shunt Active Power FiltersivaNoch keine Bewertungen
- Rural Poverty and Inequality in EthiopiaDokument20 SeitenRural Poverty and Inequality in EthiopiaSemalignNoch keine Bewertungen
- C. E. R. A. E: (Content, Experience, Reflection, Analysis and Evaluation)Dokument13 SeitenC. E. R. A. E: (Content, Experience, Reflection, Analysis and Evaluation)Patricia NikolaNoch keine Bewertungen
- Adobe Scan May 23, 2022Dokument3 SeitenAdobe Scan May 23, 2022Anagh ShuklaNoch keine Bewertungen
- ECE 470 Introduction To Robotics Alternative Lab 4 and 5 Manual Spring 2020Dokument22 SeitenECE 470 Introduction To Robotics Alternative Lab 4 and 5 Manual Spring 2020SELVAKUMAR RNoch keine Bewertungen
- Bridge ManualDokument13 SeitenBridge ManualAzik KunouNoch keine Bewertungen
- Chapter 3 - Multiple Random Variables-UpdatedDokument25 SeitenChapter 3 - Multiple Random Variables-Updatedfarouq_razzaz2574Noch keine Bewertungen
- Tran2019 PDFDokument10 SeitenTran2019 PDFRamot Hamonangan AgusDian SitompulNoch keine Bewertungen
- Chemistry, Mathematics & Physics All India Internal Test SeriesDokument11 SeitenChemistry, Mathematics & Physics All India Internal Test SeriesSayantan PalNoch keine Bewertungen
- Sample Solution Midterm 2Dokument9 SeitenSample Solution Midterm 2Ferdinand MangaoangNoch keine Bewertungen
- Business Research Methods: Problem Definition and The Research ProposalDokument29 SeitenBusiness Research Methods: Problem Definition and The Research ProposalS- AjmeriNoch keine Bewertungen
- Interesting Facts About Switch Statement in CDokument6 SeitenInteresting Facts About Switch Statement in CGajanan BuchalwarNoch keine Bewertungen
- Excel 2007 Lecture NotesDokument20 SeitenExcel 2007 Lecture Notessmb_146100% (1)
- Chemical Engineering Plant Economics MCQ Questions & Answers - Chemical EngineeringDokument6 SeitenChemical Engineering Plant Economics MCQ Questions & Answers - Chemical Engineeringsrinu02062Noch keine Bewertungen
- Figueiredo 2016Dokument22 SeitenFigueiredo 2016Annisa RahmadayantiNoch keine Bewertungen
- Quiz 2Dokument4 SeitenQuiz 2Clash ClanNoch keine Bewertungen
- A Shortcoming in The Geometrically Non-Linear Shakedown TheoremDokument2 SeitenA Shortcoming in The Geometrically Non-Linear Shakedown TheoremRui CbNoch keine Bewertungen
- Probability DistributionsDokument167 SeitenProbability DistributionslihaiyangNoch keine Bewertungen