Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- A7105 Datasheet v1.4Dokument89 SeitenA7105 Datasheet v1.4Paola HaroNoch keine Bewertungen
- XT1144 T DatasheetDokument2 SeitenXT1144 T DatasheetPaola HaroNoch keine Bewertungen
- Raspberry Pi Pico C SDKDokument201 SeitenRaspberry Pi Pico C SDKPaola HaroNoch keine Bewertungen
- Sketching PeopleDokument41 SeitenSketching PeoplePaola HaroNoch keine Bewertungen
- Gesture Drawing Vol 3 by Ryan WoodwardDokument228 SeitenGesture Drawing Vol 3 by Ryan WoodwardPaola Haro100% (2)
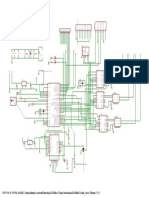
- 12/11/14 4:13 PM F 0.60 /Users/Derek - Kuschel/Desktop/Canbus-Triple-Hardware/Canbustriple - F.SCH (Sheet: 1/1)Dokument1 Seite12/11/14 4:13 PM F 0.60 /Users/Derek - Kuschel/Desktop/Canbus-Triple-Hardware/Canbustriple - F.SCH (Sheet: 1/1)Paola HaroNoch keine Bewertungen
- Hero Kids - Fantasy Supplement - Hero Cards - Spanish (11314117)Dokument9 SeitenHero Kids - Fantasy Supplement - Hero Cards - Spanish (11314117)Paola HaroNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Basic Introduction To The UCCE Servers and ComponentsDokument24 SeitenBasic Introduction To The UCCE Servers and ComponentsDaksin SpNoch keine Bewertungen
- SOP Section Rolling Machine #10011234567891123Dokument3 SeitenSOP Section Rolling Machine #10011234567891123saturnelNoch keine Bewertungen
- Preparing For Successful Data Integrity AuditsDokument23 SeitenPreparing For Successful Data Integrity AuditsDante Iulli100% (1)
- IntroSoC Lab04Dokument10 SeitenIntroSoC Lab04Ngữ Đào DuyNoch keine Bewertungen
- Restructuring of The Swedish National Grid Control Centres: Session 2004Dokument7 SeitenRestructuring of The Swedish National Grid Control Centres: Session 2004ramsesiNoch keine Bewertungen
- FALCON: Smart Portable Solution: Condition Monitoring Has Never Been So Easy!!Dokument21 SeitenFALCON: Smart Portable Solution: Condition Monitoring Has Never Been So Easy!!Lê Xuân HậuNoch keine Bewertungen
- TSD MTD WM MTD Production RF Receiving AbapDokument52 SeitenTSD MTD WM MTD Production RF Receiving AbapsourishNoch keine Bewertungen
- Asic Prototyping AldecDokument10 SeitenAsic Prototyping AldecKhaled Abou ElseoudNoch keine Bewertungen
- Ahoy Bookaneers! Ela Meagan Oakley: 2 Classes at Each Grade LevelDokument8 SeitenAhoy Bookaneers! Ela Meagan Oakley: 2 Classes at Each Grade Levelmeaganlee86Noch keine Bewertungen
- Software Dev Processes Project 1Dokument2 SeitenSoftware Dev Processes Project 1ereter50% (8)
- Flexible Pneumatic Actuator For PV Solar Tracking ApplicationsDokument4 SeitenFlexible Pneumatic Actuator For PV Solar Tracking ApplicationsHilmi Dhiya UlhaqNoch keine Bewertungen
- Middleware Seminar ReportDokument22 SeitenMiddleware Seminar ReportSudipta Dhara33% (3)
- Schrack Slimline PCB Relay SNR: General Purpose Relays PCB RelaysDokument3 SeitenSchrack Slimline PCB Relay SNR: General Purpose Relays PCB RelaysJadi PurwonoNoch keine Bewertungen
- Amiga 500 IntroductionDokument294 SeitenAmiga 500 IntroductionMalcolmNoch keine Bewertungen
- 320/330 Hydraulic Excavators: Technical PresentationDokument104 Seiten320/330 Hydraulic Excavators: Technical Presentationramon hidalgo100% (3)
- Adspy Product ResearchDokument1 SeiteAdspy Product Researchমুমিনুল ইসলাম মুরাদNoch keine Bewertungen
- Syllabus Booklet ElectronicsDokument15 SeitenSyllabus Booklet ElectronicsZuraizNawazNoch keine Bewertungen
- Chapter 6: Fundamentals of Product and Service CostingDokument2 SeitenChapter 6: Fundamentals of Product and Service CostingRorNoch keine Bewertungen
- Medical Store Computer Project-FinalDokument32 SeitenMedical Store Computer Project-FinalYuvan KumarNoch keine Bewertungen
- Popular Plan Vouchers (FRC) Popular Rate Cutter StvsDokument1 SeitePopular Plan Vouchers (FRC) Popular Rate Cutter StvsRahul SinghNoch keine Bewertungen
- Generic PapersizesDokument3 SeitenGeneric PapersizesConarch StudioNoch keine Bewertungen
- unclass-DISN CPGDokument181 Seitenunclass-DISN CPGjacquez.kainoaNoch keine Bewertungen
- Prius Energy FlowDokument1 SeitePrius Energy Flowmsfz751Noch keine Bewertungen
- Introduction To Vault CoreDokument25 SeitenIntroduction To Vault CoreUni QloNoch keine Bewertungen
- EU Type Examination Certificate No. DK0199.629Dokument12 SeitenEU Type Examination Certificate No. DK0199.629Ovidiu SmadiciNoch keine Bewertungen
- Praat ProsodyDokument17 SeitenPraat Prosodydivdix1Noch keine Bewertungen
- Base CodeDokument118 SeitenBase CodePatrick de Wit100% (1)
- The Multi Billion Dollar Industry You Can Make Money From EasilyDokument34 SeitenThe Multi Billion Dollar Industry You Can Make Money From EasilyJoshuaNoch keine Bewertungen
- CV Alexandru PaturanDokument1 SeiteCV Alexandru PaturanAlexreferatNoch keine Bewertungen
- U-BOOTS (1) Technical SeminarDokument18 SeitenU-BOOTS (1) Technical SeminarBasavaraj M PatilNoch keine Bewertungen