Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Click On A Category To View Respective Stock: Hdds / SsdsDokument36 SeitenClick On A Category To View Respective Stock: Hdds / SsdsproNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- NtripconfigDokument1 SeiteNtripconfigproNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Human Body Temperature Measurement ListDokument2 SeitenHuman Body Temperature Measurement ListproNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Gold Extraction and Recovery ProcessesDokument20 SeitenGold Extraction and Recovery ProcessesGinanjar Surya RamadhanNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Khffilt ManuDokument6 SeitenKhffilt ManuAlao EmmanuelNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Flux Gate ExplainedDokument5 SeitenFlux Gate ExplaineddimovdimchoNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Unconventional Water Detection: Field Test of The Dowsing Technique in Dry Zones: Part 2Dokument31 SeitenUnconventional Water Detection: Field Test of The Dowsing Technique in Dry Zones: Part 2proNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Khffilt ManuDokument6 SeitenKhffilt ManuAlao EmmanuelNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Pioneer Aerial Surveys Promo 2017Dokument8 SeitenPioneer Aerial Surveys Promo 2017proNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- XVR5108HSDokument3 SeitenXVR5108HSproNoch keine Bewertungen
- XVR5108HSDokument3 SeitenXVR5108HSproNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Pulse Induction Metal Detectors - The PrincipleDokument4 SeitenPulse Induction Metal Detectors - The PrincipleproNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- MagnetliveDokument1 SeiteMagnetliveproNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- PM UAVsDokument4 SeitenPM UAVsproNoch keine Bewertungen
- 44 Kalavrita Kalambaka PDFDokument9 Seiten44 Kalavrita Kalambaka PDFproNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Instructions For Running PrepVLF and Inv2DVLF 2 DDokument12 SeitenInstructions For Running PrepVLF and Inv2DVLF 2 Dpro100% (2)
- Calcine Volume: Survey Costs B: First Survey Second SurveyDokument2 SeitenCalcine Volume: Survey Costs B: First Survey Second SurveyproNoch keine Bewertungen
- Telma OEM Guidelines J1939 J2284: Revised: 22mar12Dokument10 SeitenTelma OEM Guidelines J1939 J2284: Revised: 22mar12maurop25984Noch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Calcine Volume: Survey Costs ADokument2 SeitenCalcine Volume: Survey Costs AproNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- 2011 Mining Geophysical Equipment Commercially Available CanadaDokument5 Seiten2011 Mining Geophysical Equipment Commercially Available CanadaproNoch keine Bewertungen
- Magnetic Case Study: Raglan Mine: Research ObjectivesDokument20 SeitenMagnetic Case Study: Raglan Mine: Research ObjectivesproNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Instructions For Running PrepVLF and Inv2DVLF 2 DDokument12 SeitenInstructions For Running PrepVLF and Inv2DVLF 2 Dpro100% (2)
- Gsm-19t Magnetometer ManualDokument3 SeitenGsm-19t Magnetometer ManualproNoch keine Bewertungen
- Magnetic Case Study: Raglan Mine: Research ObjectivesDokument20 SeitenMagnetic Case Study: Raglan Mine: Research ObjectivesproNoch keine Bewertungen
- 2how Strong Are MagnetsDokument43 Seiten2how Strong Are MagnetsproNoch keine Bewertungen
- R Mag ReportDokument4 SeitenR Mag ReportproNoch keine Bewertungen
- 3d Analytic Signal PDFDokument9 Seiten3d Analytic Signal PDFproNoch keine Bewertungen
- 3d Analytic Signal PDFDokument9 Seiten3d Analytic Signal PDFproNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Vlffilter PDFDokument6 SeitenVlffilter PDFproNoch keine Bewertungen
- 2how Strong Are Magnets PDFDokument5 Seiten2how Strong Are Magnets PDFproNoch keine Bewertungen
- Comparison of Sic Mosfet and Si IgbtDokument10 SeitenComparison of Sic Mosfet and Si IgbtYassir ButtNoch keine Bewertungen
- 2011 - Papanikolaou E. - Markatos N. - Int J Hydrogen EnergyDokument9 Seiten2011 - Papanikolaou E. - Markatos N. - Int J Hydrogen EnergyNMarkatosNoch keine Bewertungen
- Present Perfect Tense ExerciseDokument13 SeitenPresent Perfect Tense Exercise39. Nguyễn Đăng QuangNoch keine Bewertungen
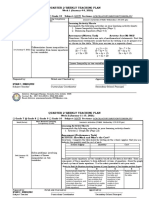
- Teaching Plan - Math 8 Week 1-8 PDFDokument8 SeitenTeaching Plan - Math 8 Week 1-8 PDFRYAN C. ENRIQUEZNoch keine Bewertungen
- AYUSH Warli Art 100628Dokument10 SeitenAYUSH Warli Art 100628adivasi yuva shakti0% (1)
- Caldon Lefm 240ci Ultrasonic Flow Meters: Integral Manifold DesignDokument6 SeitenCaldon Lefm 240ci Ultrasonic Flow Meters: Integral Manifold DesignJim LimNoch keine Bewertungen
- Hydropneumatic Booster Set MFDokument5 SeitenHydropneumatic Booster Set MFdonchakdeNoch keine Bewertungen
- Ccu 3900alDokument3 SeitenCcu 3900alTourchianNoch keine Bewertungen
- Activity Sheet Housekeeping Week - 8 - Grades 9-10Dokument5 SeitenActivity Sheet Housekeeping Week - 8 - Grades 9-10Anne AlejandrinoNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Altura Architect & Interior Design BriefDokument56 SeitenAltura Architect & Interior Design BriefDave WongNoch keine Bewertungen
- Basic Knowledge About WDM Principle ADokument92 SeitenBasic Knowledge About WDM Principle AJosé LópezNoch keine Bewertungen
- Plant Vs Filter by Diana WalstadDokument6 SeitenPlant Vs Filter by Diana WalstadaachuNoch keine Bewertungen
- Lit 30Dokument2 SeitenLit 30ReemAlashhab81Noch keine Bewertungen
- Ultrasonic Based Distance Measurement SystemDokument18 SeitenUltrasonic Based Distance Measurement SystemAman100% (2)
- SCC5-4000F Single ShaftDokument15 SeitenSCC5-4000F Single ShaftudelmarkNoch keine Bewertungen
- Human Capital PlanningDokument27 SeitenHuman Capital Planningalokshri25Noch keine Bewertungen
- Onco Case StudyDokument2 SeitenOnco Case StudyAllenNoch keine Bewertungen
- Alem Ketema Proposal NewDokument25 SeitenAlem Ketema Proposal NewLeulNoch keine Bewertungen
- 8. Nguyễn Tất Thành- Kon TumDokument17 Seiten8. Nguyễn Tất Thành- Kon TumK60 TRẦN MINH QUANGNoch keine Bewertungen
- TV Antenna Tower CollapseDokument4 SeitenTV Antenna Tower CollapseImdaad ChuubbNoch keine Bewertungen
- Invitation of Nomination For The Rajiv Gandhi Wildlife Conservation Award For The Year 2011&2012Dokument2 SeitenInvitation of Nomination For The Rajiv Gandhi Wildlife Conservation Award For The Year 2011&2012Naresh KadyanNoch keine Bewertungen
- Makerere University Is Inviting Applications For Undergraduate Admissions On Private Sponsorship For Academic Year 2015/2016Dokument9 SeitenMakerere University Is Inviting Applications For Undergraduate Admissions On Private Sponsorship For Academic Year 2015/2016The Campus TimesNoch keine Bewertungen
- PDFDokument3 SeitenPDFvaliNoch keine Bewertungen
- Vignyapan 18-04-2024Dokument16 SeitenVignyapan 18-04-2024adil1787Noch keine Bewertungen
- Session 1: Strategic Marketing - Introduction & ScopeDokument38 SeitenSession 1: Strategic Marketing - Introduction & ScopeImrul Hasan ChowdhuryNoch keine Bewertungen
- Laporan Keuangan TRIN Per Juni 2023-FinalDokument123 SeitenLaporan Keuangan TRIN Per Juni 2023-FinalAdit RamdhaniNoch keine Bewertungen
- TSC M34PV - TSC M48PV - User Manual - CryoMed - General Purpose - Rev A - EnglishDokument93 SeitenTSC M34PV - TSC M48PV - User Manual - CryoMed - General Purpose - Rev A - EnglishMurielle HeuchonNoch keine Bewertungen
- What Is Terrorism NotesDokument3 SeitenWhat Is Terrorism NotesSyed Ali HaiderNoch keine Bewertungen
- Instruction Manual Twin Lobe CompressorDokument10 SeitenInstruction Manual Twin Lobe Compressorvsaagar100% (1)
- Old Highland Park Baptist Church E01Dokument74 SeitenOld Highland Park Baptist Church E01Lawrence Garner100% (2)