Das könnte Ihnen auch gefallen
- Implementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoVon EverandImplementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoNoch keine Bewertungen
- LABSD1Dokument41 SeitenLABSD1Rafael Monteiro100% (1)
- Aplicando Iot Para Medir Um Voltímetro Com Esp8266 (nodemcu) Programado Em ArduinoVon EverandAplicando Iot Para Medir Um Voltímetro Com Esp8266 (nodemcu) Programado Em ArduinoNoch keine Bewertungen
- Lista de Exercicios Circuitos LógicosDokument3 SeitenLista de Exercicios Circuitos LógicosAndre BomjardimNoch keine Bewertungen
- Relatorio ProntoDokument21 SeitenRelatorio ProntoPaulo SilvaNoch keine Bewertungen
- Exp Lab Sistemas DigitaisDokument33 SeitenExp Lab Sistemas DigitaisautojhNoch keine Bewertungen
- Relatorio Aula Pratica 3Dokument14 SeitenRelatorio Aula Pratica 3Paulo Cesar Menegon CastroNoch keine Bewertungen
- Lista de Exercicios Sistemas DigitaisDokument2 SeitenLista de Exercicios Sistemas DigitaisAlexandre QuintasNoch keine Bewertungen
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoVon EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoNoch keine Bewertungen
- Programação Em Assembly Para O Microcontrolador Pic18f Volume IVon EverandProgramação Em Assembly Para O Microcontrolador Pic18f Volume INoch keine Bewertungen
- Apostila - 2004v1 74151Dokument37 SeitenApostila - 2004v1 74151luciocadastroNoch keine Bewertungen
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViVon EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViNoch keine Bewertungen
- Projetos De Eletrônica Industrial Usando O ArduinoVon EverandProjetos De Eletrônica Industrial Usando O ArduinoNoch keine Bewertungen
- LSD 2122i LAB1 RelatórioDokument6 SeitenLSD 2122i LAB1 RelatórioJEREMIAS BORGESNoch keine Bewertungen
- 3° Relatório - Sistemas - DigitaisDokument12 Seiten3° Relatório - Sistemas - DigitaisPaulo ReisNoch keine Bewertungen
- Circuitos Lógicos MSIDokument15 SeitenCircuitos Lógicos MSIAbel companhiaNoch keine Bewertungen
- 7219-E-7221-Display de Leds de 7 SegmentosDokument8 Seiten7219-E-7221-Display de Leds de 7 SegmentosotoNoch keine Bewertungen
- Amplificadores OperacionaisDokument9 SeitenAmplificadores OperacionaissricardofNoch keine Bewertungen
- Somador Completo e Meio SomadorDokument24 SeitenSomador Completo e Meio SomadorKarinesaNoch keine Bewertungen
- Iot Para Medir Ph Com Esp32 Programado Em ArduinoVon EverandIot Para Medir Ph Com Esp32 Programado Em ArduinoNoch keine Bewertungen
- Antologia De Projetos No Arduino Com Display Lcd Volume VVon EverandAntologia De Projetos No Arduino Com Display Lcd Volume VNoch keine Bewertungen
- Desenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoVon EverandDesenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoNoch keine Bewertungen
- 1° Relatorio Portas LogicasDokument13 Seiten1° Relatorio Portas LogicasJosé Ilton100% (2)
- Aula IFF - Linguagem Ladder - Blocos MatemáticosDokument10 SeitenAula IFF - Linguagem Ladder - Blocos MatemáticosVictor BarretoNoch keine Bewertungen
- Projetos De Instrumentação Eletrônica Usando O ArduinoVon EverandProjetos De Instrumentação Eletrônica Usando O ArduinoNoch keine Bewertungen
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViiiVon EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViiiNoch keine Bewertungen
- Informando O Consumo De Energia Por Rs232 Via Protocolo Pima Programado No ArduinoVon EverandInformando O Consumo De Energia Por Rs232 Via Protocolo Pima Programado No ArduinoNoch keine Bewertungen
- Desenvolvendo Um Medidor De Vazão Modbus Rs485 No ArduinoVon EverandDesenvolvendo Um Medidor De Vazão Modbus Rs485 No ArduinoNoch keine Bewertungen
- Microcontrolandos - Comunicação SPIDokument4 SeitenMicrocontrolandos - Comunicação SPIRicardo Ataíde0% (1)
- Desenvolvendo Uma Lombada Eletrônica Para Apresentar A Velocidade Com ArduinoVon EverandDesenvolvendo Uma Lombada Eletrônica Para Apresentar A Velocidade Com ArduinoNoch keine Bewertungen
- Treinamento Cps 4000Dokument101 SeitenTreinamento Cps 4000Yuri QueirozNoch keine Bewertungen
- TRB SDC-2022 S1 220623 192038Dokument2 SeitenTRB SDC-2022 S1 220623 192038Soares ViníciusNoch keine Bewertungen
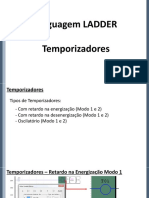
- Linguagem LADDER TemporizadoresDokument26 SeitenLinguagem LADDER TemporizadoresBruno CrivelliNoch keine Bewertungen
- Relatorio Contador OriginalDokument12 SeitenRelatorio Contador OriginalFofuchinho MphiliNoch keine Bewertungen
- Procedimentos de Instalação Garra Traçadora em EscavadeiraDokument15 SeitenProcedimentos de Instalação Garra Traçadora em EscavadeiraMarcoNoch keine Bewertungen
- Manual DactarDokument8 SeitenManual DactarOscar Arthur KoepkeNoch keine Bewertungen
- Manual Controle Remoto AFTRCTT PDFDokument12 SeitenManual Controle Remoto AFTRCTT PDFRaphael Dario Braga100% (1)
- Manual em Portugues microARRANGER (042-082) .En - PTDokument41 SeitenManual em Portugues microARRANGER (042-082) .En - PTaspenidoNoch keine Bewertungen
- 07B01 - Sistema Eletrônico PDFDokument68 Seiten07B01 - Sistema Eletrônico PDFjonathan capelliNoch keine Bewertungen
- Introdução A RoboticaDokument112 SeitenIntrodução A Roboticanilsonery100% (2)
- Manual Twin TurboDokument5 SeitenManual Twin TurboEphramoliverNoch keine Bewertungen
- Rotação DX700Dokument7 SeitenRotação DX700Luan MaxNoch keine Bewertungen
- Manual de Instruções - Mini Escavadeira - BR10Dokument22 SeitenManual de Instruções - Mini Escavadeira - BR10Jj Rebeca100% (1)
- 58911358-Manual-PAT-Traduzido-QY65K XCMG e Outros Q UseDokument32 Seiten58911358-Manual-PAT-Traduzido-QY65K XCMG e Outros Q UseAdriano Alves Silva50% (2)
- Manual Usm Go - Ge UltrasomDokument227 SeitenManual Usm Go - Ge Ultrasombrunolacerdajr100% (4)
- Sistema de Controle Hidraulico - 360Dokument54 SeitenSistema de Controle Hidraulico - 360leonardo100% (1)
- Tutorial Arcade CaseiroDokument28 SeitenTutorial Arcade CaseiroJoathan Lobo FerrazNoch keine Bewertungen
- Esquema Elétrico Sistema Maxixplorer: Atualizado Em: 27/05/2011Dokument54 SeitenEsquema Elétrico Sistema Maxixplorer: Atualizado Em: 27/05/2011Marcos ViniciusNoch keine Bewertungen
- Cadeira de Rodas Motorizada Comfort 1Dokument26 SeitenCadeira de Rodas Motorizada Comfort 1aurora rodriguesNoch keine Bewertungen
- Minicarregadeiras de Médio Porte: s130 s150 s160 s175 s185 s205Dokument6 SeitenMinicarregadeiras de Médio Porte: s130 s150 s160 s175 s185 s205Gabriel Amorim100% (1)
- AC08-AC11-AC14 - Manual Do Usuário - Plataformas Até 4 MetrosDokument17 SeitenAC08-AC11-AC14 - Manual Do Usuário - Plataformas Até 4 MetrosElenilzaSantosNoch keine Bewertungen
- Calibração 1200 1350Dokument64 SeitenCalibração 1200 1350Cláudio Lima0% (1)
- Codigos de Falhas em Português Da FT e VX - Docx Empilhadeiras HysterDokument10 SeitenCodigos de Falhas em Português Da FT e VX - Docx Empilhadeiras HysterJose De Moura CamaraNoch keine Bewertungen
- Manual LitchiDokument56 SeitenManual LitchiDinael Milani67% (3)
- Empilhadeira RoboticaDokument82 SeitenEmpilhadeira Roboticamatheus leopoldo mendes de sousaNoch keine Bewertungen
- ST282 SkyTrak Rev04Dokument185 SeitenST282 SkyTrak Rev04João Márcio de Miranda100% (1)
- Stargate NGDokument2 SeitenStargate NGwallaceffsNoch keine Bewertungen
- Clear CL Black ManualDokument21 SeitenClear CL Black ManualMárcio MeneleuNoch keine Bewertungen
- AC08 e AC11 - Manual Do Usuário - Plataformas Até 4 MetrosDokument17 SeitenAC08 e AC11 - Manual Do Usuário - Plataformas Até 4 MetrosArilene AvilaNoch keine Bewertungen
- Sensores VerDokument36 SeitenSensores VerFilipe CoimbraNoch keine Bewertungen
- Manual Freedom Stand UpDokument24 SeitenManual Freedom Stand UpBruno Aleixo100% (1)
- 16m 150213050130 Conversion Gate01 PDFDokument28 Seiten16m 150213050130 Conversion Gate01 PDFDouglas M. GehlenNoch keine Bewertungen
- Tello+User+Manual+v1.0 en 2.12.en - PTDokument22 SeitenTello+User+Manual+v1.0 en 2.12.en - PTandreNoch keine Bewertungen
- Manual - Rádio - V4 - RLC01Dokument16 SeitenManual - Rádio - V4 - RLC01José SignorNoch keine Bewertungen