Das könnte Ihnen auch gefallen
- Lista AutomaçãoDokument61 SeitenLista AutomaçãoHiago bragaNoch keine Bewertungen
- Sensores Industriais - Fundamentos e AplicaçõesDokument19 SeitenSensores Industriais - Fundamentos e AplicaçõesRafael MorenoNoch keine Bewertungen
- Resposta Dos Exercicios - Sensores Industriais - Fundamentos e AplicaçõesDokument19 SeitenResposta Dos Exercicios - Sensores Industriais - Fundamentos e AplicaçõesAntonio Pereira0% (1)
- (Prova) Concurso Petrobras - Tec InstrumentacaoDokument8 Seiten(Prova) Concurso Petrobras - Tec InstrumentacaoClarisse MendoncaNoch keine Bewertungen
- EstatisticaDokument22 SeitenEstatisticaRogeria FariaNoch keine Bewertungen
- I3210037 PDFDokument14 SeitenI3210037 PDFJonatan Luiz GregórioNoch keine Bewertungen
- Treinamento em Controladores EletronicosDokument53 SeitenTreinamento em Controladores EletronicosDigeo MachadoNoch keine Bewertungen
- Treinamento em Controladores EletronicosDokument53 SeitenTreinamento em Controladores EletronicosDigeo MachadoNoch keine Bewertungen
- Sistema Microprocessado para Controle de Posição AngularDokument14 SeitenSistema Microprocessado para Controle de Posição AngularÉlisson RíllerNoch keine Bewertungen
- RELATÓRIO 1 - Implementação de Controladores Digitais de Processo Industriais - COMPLETODokument18 SeitenRELATÓRIO 1 - Implementação de Controladores Digitais de Processo Industriais - COMPLETORaniere LiraNoch keine Bewertungen
- Modelagem de Um Sistema Bola e Barra (Ball and Beam)Dokument22 SeitenModelagem de Um Sistema Bola e Barra (Ball and Beam)americo079100% (1)
- Atividade Prática 1 (2021)Dokument9 SeitenAtividade Prática 1 (2021)gabi freitasNoch keine Bewertungen
- 01 OkDokument19 Seiten01 OkroginaldoNoch keine Bewertungen
- Malhas Industriais - InstrumentaçãoDokument15 SeitenMalhas Industriais - InstrumentaçãoLuiz FigueiredoNoch keine Bewertungen
- Sistemas de ControleDokument7 SeitenSistemas de ControleFilipe A. VieiraNoch keine Bewertungen
- Descritivo Tecnico e Manual de Operação - Rev 0Dokument72 SeitenDescritivo Tecnico e Manual de Operação - Rev 0Matheus CarvalhoNoch keine Bewertungen
- Modelagem Matamática e Controle de Um Sistema "Ball and Beam"Dokument21 SeitenModelagem Matamática e Controle de Um Sistema "Ball and Beam"americo079Noch keine Bewertungen
- Inversor de Frequência TCC Entregar HJDokument14 SeitenInversor de Frequência TCC Entregar HJRebson MartinsNoch keine Bewertungen
- CONTROLE PROPORCIONAL INTEGRAL DIGITAL APLICADO EM VÁLVULA BORBOLETA AUTOMOTIVA - Artigo Original PDFDokument19 SeitenCONTROLE PROPORCIONAL INTEGRAL DIGITAL APLICADO EM VÁLVULA BORBOLETA AUTOMOTIVA - Artigo Original PDFBruno PizzolNoch keine Bewertungen
- Tipos de Malhas de ControleDokument10 SeitenTipos de Malhas de ControleAntonio Jose PauloNoch keine Bewertungen
- Sistema de Regulação Automática de Um Sistema Térmico - Trabalho de ControloDokument8 SeitenSistema de Regulação Automática de Um Sistema Térmico - Trabalho de ControloGerson AvelinoNoch keine Bewertungen
- Livro Sensores Industriais GabaritoDokument15 SeitenLivro Sensores Industriais GabaritoEduardo AlmeidaNoch keine Bewertungen
- Hitachi Set FreeDokument24 SeitenHitachi Set FreeTatty Gonçalves100% (1)
- 01 C1 IntroduccionDokument11 Seiten01 C1 IntroduccionGildo MatiasNoch keine Bewertungen
- A3 MatheusDokument11 SeitenA3 MatheusMatheus EduardoNoch keine Bewertungen
- Inicg00541 01CDokument4 SeitenInicg00541 01CLeonardo SilveiraNoch keine Bewertungen
- Corripio - Capitulo 6Dokument30 SeitenCorripio - Capitulo 6tai_ssNoch keine Bewertungen
- Sensores Industriais - GabaritoDokument16 SeitenSensores Industriais - GabaritoRicardo Pasquati Pontarolli100% (1)
- TB - Projeto de Controle de Carga Com Triac para o PicDokument8 SeitenTB - Projeto de Controle de Carga Com Triac para o PicAri Ercilio Farias FereirraNoch keine Bewertungen
- Controle II. Estudo e Sintonia de Controladores IndustriaisDokument56 SeitenControle II. Estudo e Sintonia de Controladores IndustriaisRoger GimenesNoch keine Bewertungen
- Tipos de Malha de Controle de Processos Industriais - Anderson BeltrameDokument8 SeitenTipos de Malha de Controle de Processos Industriais - Anderson BeltrameMailana LessaNoch keine Bewertungen
- Catalogo Controladores de Temperatura Ind 2Dokument12 SeitenCatalogo Controladores de Temperatura Ind 2lekobh0% (1)
- A Evolução Dos Sistemas de ControleDokument8 SeitenA Evolução Dos Sistemas de ControlegustavopaloNoch keine Bewertungen
- CLP Siemens Step5Dokument83 SeitenCLP Siemens Step5adriano_falavinha9186100% (1)
- Funções SCADADokument72 SeitenFunções SCADArodrigoand100% (2)
- Resumo Cap 1 (Ivo Leoni)Dokument6 SeitenResumo Cap 1 (Ivo Leoni)Ivo LeoniNoch keine Bewertungen
- Manual de Operação TCCDokument18 SeitenManual de Operação TCCDaniel CunhaNoch keine Bewertungen
- Trabalho Acionamentos ElétricosDokument11 SeitenTrabalho Acionamentos ElétricosFelipe NicolaNoch keine Bewertungen
- Guia Tradução FX03 Rev.0309.en - PTDokument29 SeitenGuia Tradução FX03 Rev.0309.en - PTAutomação PredialNoch keine Bewertungen
- Introdução À Programação PLC para Sistemas HVACDokument4 SeitenIntrodução À Programação PLC para Sistemas HVACzangatalopesNoch keine Bewertungen
- ÍndiceDokument9 SeitenÍndiceËnesson VicenteNoch keine Bewertungen
- Apostila CLP SLC500Dokument62 SeitenApostila CLP SLC500Magisterr100% (1)
- Roteiro Do Trabalho LSCCDokument3 SeitenRoteiro Do Trabalho LSCCRodrigo ResendeNoch keine Bewertungen
- Conceitos Básicos de Instrumentação e ControleDokument160 SeitenConceitos Básicos de Instrumentação e ControleRomulo PiresNoch keine Bewertungen
- Lab 07 (Presencial) - Controlador-Observador + LQR +LQGDokument6 SeitenLab 07 (Presencial) - Controlador-Observador + LQR +LQGGera BarbosaNoch keine Bewertungen
- LISTA Controle e Processo 01Dokument9 SeitenLISTA Controle e Processo 01allanNoch keine Bewertungen
- Aula de AutomaçãoDokument17 SeitenAula de AutomaçãoildoNoch keine Bewertungen
- Avaliacao PowerBDokument4 SeitenAvaliacao PowerBDiovane Ana ClaudiaNoch keine Bewertungen
- Controle Da Velocidade de Um Motor CCDokument5 SeitenControle Da Velocidade de Um Motor CCLeonardo CampagnolloNoch keine Bewertungen
- ÍndiceDokument9 SeitenÍndiceËnesson VicenteNoch keine Bewertungen
- Capa TCCDokument10 SeitenCapa TCChanyel.silvaNoch keine Bewertungen
- Avaliação 02 - G3Dokument5 SeitenAvaliação 02 - G3Arthurus CaesarNoch keine Bewertungen
- Controle de Motor Trifásico Com PIC e Módulo de PotênciaDokument3 SeitenControle de Motor Trifásico Com PIC e Módulo de Potênciaafzagui100% (3)
- CONTROLE DE VELOCIDADE PWM Cadeira de Roda Final.Dokument79 SeitenCONTROLE DE VELOCIDADE PWM Cadeira de Roda Final.José Pereira LimaNoch keine Bewertungen
- Resumo Sistemas de ControleDokument11 SeitenResumo Sistemas de ControleKarine TavaresNoch keine Bewertungen
- Lendo Um Encoder Para Controle De Velocidade De Motor Dc Com Base No ArduinoVon EverandLendo Um Encoder Para Controle De Velocidade De Motor Dc Com Base No ArduinoNoch keine Bewertungen
- Controle De Até 16 Canais De Pwm Com Tlc5940 No ArduinoVon EverandControle De Até 16 Canais De Pwm Com Tlc5940 No ArduinoNoch keine Bewertungen
- Implementando Um Soft-starter Com Base No Stm8s Programado No ArduinoVon EverandImplementando Um Soft-starter Com Base No Stm8s Programado No ArduinoNoch keine Bewertungen
- Controle DigitalVon EverandControle DigitalNoch keine Bewertungen
- J F Almeida Prado - o Brasil e o Colonialismo EuropeuDokument484 SeitenJ F Almeida Prado - o Brasil e o Colonialismo EuropeuJogador NbaNoch keine Bewertungen
- Inoxfluid - ConexõesDokument36 SeitenInoxfluid - ConexõesAdemilson Caetano100% (1)
- Lista de Exercício Operações Unitária - EXTRAÇÃODokument4 SeitenLista de Exercício Operações Unitária - EXTRAÇÃOBruno SantosNoch keine Bewertungen
- Métodos e Princípios de Sistemática BiológicaDokument42 SeitenMétodos e Princípios de Sistemática BiológicaNatália SouzaNoch keine Bewertungen
- 2018 12 31-Excelsior-Alimentos-S A Pdf-Y0rDokument32 Seiten2018 12 31-Excelsior-Alimentos-S A Pdf-Y0rJessica SantosNoch keine Bewertungen
- Fontes de Ignicao PDFDokument38 SeitenFontes de Ignicao PDFJoào AlvesNoch keine Bewertungen
- Fabricantes Homologados PDFDokument12 SeitenFabricantes Homologados PDFEdinaldo MouraNoch keine Bewertungen
- ELI DimensionamentoDokument37 SeitenELI Dimensionamentoscorpion-acmNoch keine Bewertungen
- Manual Do Estudante Abepro e Abepro Jovem Edia A o 2014 1 PDFDokument51 SeitenManual Do Estudante Abepro e Abepro Jovem Edia A o 2014 1 PDFElsin SilvaNoch keine Bewertungen
- ABNT NBR 6024 2012 - Informação e Documentação - Numeração Progressiva Das Seções de Um Documento - Apresentação PDFDokument8 SeitenABNT NBR 6024 2012 - Informação e Documentação - Numeração Progressiva Das Seções de Um Documento - Apresentação PDFAlexandre Rossignoli ZanettiNoch keine Bewertungen
- U1 Aula8 Escalas CartograficasDokument10 SeitenU1 Aula8 Escalas CartograficasIgor Amaral PessoaNoch keine Bewertungen
- A Luuanda de José Luandino VieiraDokument17 SeitenA Luuanda de José Luandino Vieirataniacmacedo100% (1)
- RGPS - Características e Regras Gerais PDFDokument162 SeitenRGPS - Características e Regras Gerais PDFLaryssa RodriguesNoch keine Bewertungen
- Aula 7 - Rochas MetamórficasDokument60 SeitenAula 7 - Rochas MetamórficasJadson FreireNoch keine Bewertungen
- N1228Dokument9 SeitenN1228Jose Alejandro Mansutti GNoch keine Bewertungen
- En172fc3600 - Technical Poxy en 1 72 FC Componente BDokument10 SeitenEn172fc3600 - Technical Poxy en 1 72 FC Componente BMarcio BritoNoch keine Bewertungen
- Física 23 - Princípios Da Eletricidade e Lei de CoulombDokument7 SeitenFísica 23 - Princípios Da Eletricidade e Lei de CoulombPaulo VieiraNoch keine Bewertungen
- Manual Notebook ZmaxDokument32 SeitenManual Notebook ZmaxNeto 6386Noch keine Bewertungen
- BÁSICO - Mód I - 1 AULA - O Processo de Criação Do Universo PDFDokument4 SeitenBÁSICO - Mód I - 1 AULA - O Processo de Criação Do Universo PDFRenan Ezra GP100% (1)
- Sony Mex-Bt2507x SMDokument50 SeitenSony Mex-Bt2507x SMAlva TrompeteNoch keine Bewertungen
- Plano de Gerenciamento de Resíduos Sólidos de GoiásDokument502 SeitenPlano de Gerenciamento de Resíduos Sólidos de GoiásItalo FerreiraNoch keine Bewertungen
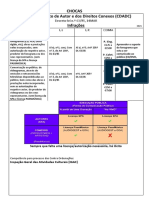
- Chocas Direito de AutorDokument3 SeitenChocas Direito de AutorAthomikNoch keine Bewertungen
- Roteiro de Entrevista - Modelo IntentusDokument2 SeitenRoteiro de Entrevista - Modelo IntentusPaloma SantosNoch keine Bewertungen
- Fichamento Ideologia Alemã - MarxDokument22 SeitenFichamento Ideologia Alemã - MarxDenner DantasNoch keine Bewertungen
- Artigo Tratamento de ÁguaDokument7 SeitenArtigo Tratamento de ÁguaGiulia GrandoNoch keine Bewertungen
- Apostilha - Vetores Mecnica-2011-1Dokument13 SeitenApostilha - Vetores Mecnica-2011-1Schena94Noch keine Bewertungen
- Biblioteconomia Alexandria em Chamas FichamentoDokument9 SeitenBiblioteconomia Alexandria em Chamas FichamentoOlivia DiasNoch keine Bewertungen
- Glossário de EmpreendedorismoDokument3 SeitenGlossário de EmpreendedorismoHenrique MonjambaNoch keine Bewertungen