Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Ros Agitr LetterDokument166 SeitenRos Agitr LetterTizita NesibuNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Student Project Pro-EDokument10 SeitenStudent Project Pro-EAmit GoelNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Lect3 To StudentsDokument17 SeitenLect3 To StudentskondylanNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Madden2010 PDFDokument8 SeitenMadden2010 PDFkondylanNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Lect2 To StudentsDokument27 SeitenLect2 To StudentskondylanNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- NUSTian Final July SeptDokument36 SeitenNUSTian Final July SeptAdeel KhanNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Technical Presentation - Arik Ethan Kinajil (25231)Dokument5 SeitenTechnical Presentation - Arik Ethan Kinajil (25231)Arik EthanNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- MI MetadataDokument310 SeitenMI MetadataMatthew McCreadyNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Linear Slot DiffuserDokument15 SeitenLinear Slot DiffuserhyderabadNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
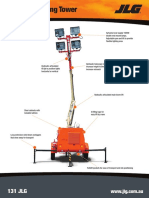
- JLG Lighting Tower 6308AN Series II 20150907Dokument2 SeitenJLG Lighting Tower 6308AN Series II 20150907DwiSulistyo09Noch keine Bewertungen
- AS1895/7 E-FLEX Sealing Solutions: Part Number AS1895/7 Reference Duct Size Seal DimensionsDokument1 SeiteAS1895/7 E-FLEX Sealing Solutions: Part Number AS1895/7 Reference Duct Size Seal DimensionsAlex Zambrana RodríguezNoch keine Bewertungen
- FG - BDER-78 Technical Catalogue - Technical - UNDokument8 SeitenFG - BDER-78 Technical Catalogue - Technical - UNAnh Le NgocNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Permeability: The Key to ProductionDokument30 SeitenPermeability: The Key to ProductionDarshak Sakhreliya100% (1)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Analysis, Specification and Estimate On Road WorksDokument71 SeitenAnalysis, Specification and Estimate On Road WorksAnonymous BACdUNvPZ280% (5)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- January2016page1to36 Layout 1Dokument36 SeitenJanuary2016page1to36 Layout 1c737Noch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Adaptive ArchitectureDokument27 SeitenAdaptive ArchitectureSanjeev BumbNoch keine Bewertungen
- Method StatementDokument2 SeitenMethod StatementKumar Jbs100% (1)
- 01chapter 5-1Dokument55 Seiten01chapter 5-1AhmNoch keine Bewertungen
- Antena Eh para 10 MetrosDokument3 SeitenAntena Eh para 10 Metros10sd156Noch keine Bewertungen
- A Study of The Spectral Properties of Rhodamine (6G&B) Dyes Mixture Dissolved in ChloroformDokument14 SeitenA Study of The Spectral Properties of Rhodamine (6G&B) Dyes Mixture Dissolved in ChloroformNoureddine BarkaNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- LV12 - Drive Shafts - Issue 1Dokument19 SeitenLV12 - Drive Shafts - Issue 1Đức HòangNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Excellent Hex Key Wrench: English VersionDokument54 SeitenExcellent Hex Key Wrench: English Versionmg pyaeNoch keine Bewertungen
- Michelson Interferometer Na Lamp-1Dokument11 SeitenMichelson Interferometer Na Lamp-1SOHINI KAYALNoch keine Bewertungen
- Wire Rope Maintenance enDokument12 SeitenWire Rope Maintenance ensriabolfazlNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- CAD1 AssignmentDokument11 SeitenCAD1 AssignmentJohn2jNoch keine Bewertungen
- Fajs FSXDokument8 SeitenFajs FSXJunhy Bandeira CassandraNoch keine Bewertungen
- Generation of Electrical Energy - B. R. GuptaDokument171 SeitenGeneration of Electrical Energy - B. R. GuptaIbrahim Ahmed43% (23)
- ReleDokument3 SeitenRelevitor4santos_6Noch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Micron Ezeprox Access Control KeypadDokument4 SeitenMicron Ezeprox Access Control KeypadThuy VuNoch keine Bewertungen
- Easygen-3000 Series (Package P1) Genset Control: InterfaceDokument102 SeitenEasygen-3000 Series (Package P1) Genset Control: InterfacejinameNoch keine Bewertungen
- AASHTO T283-22 Standard Method of Test for Resistance of Compacted Asphalt Mixtures to Moisture-Induced DamageDokument11 SeitenAASHTO T283-22 Standard Method of Test for Resistance of Compacted Asphalt Mixtures to Moisture-Induced DamageErnesto Oscar VidelaNoch keine Bewertungen
- Strength of Pressure Vessels With Ellipsoidal HeadsDokument8 SeitenStrength of Pressure Vessels With Ellipsoidal Headsنصرالدين ادريسNoch keine Bewertungen
- Vinay Quality ResumeDokument3 SeitenVinay Quality Resumevinay kumarNoch keine Bewertungen
- Essential safety tips for using a pressure cookerDokument18 SeitenEssential safety tips for using a pressure cookerCarlotaNoch keine Bewertungen
- Physics ExamDokument30 SeitenPhysics Examjomar bolasocNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)