Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Space Weather Effects of October-November 2003Dokument5 SeitenSpace Weather Effects of October-November 2003Ayorinde T TundeNoch keine Bewertungen
- IDL Programming Techniques 2nd EditionDokument465 SeitenIDL Programming Techniques 2nd EditionAyorinde T TundeNoch keine Bewertungen
- Note On The Addition of Angular MomentumDokument8 SeitenNote On The Addition of Angular MomentumAyorinde T TundeNoch keine Bewertungen
- 1506 02567 PDFDokument350 Seiten1506 02567 PDFAyorinde T TundeNoch keine Bewertungen
- Atmosphere 07 00116Dokument20 SeitenAtmosphere 07 00116Ayorinde T TundeNoch keine Bewertungen
- Sakai Mathematical Sciences 1986Dokument8 SeitenSakai Mathematical Sciences 1986Ayorinde T TundeNoch keine Bewertungen
- Basic Space Plasma Physics - Revised Edition: January 2012Dokument17 SeitenBasic Space Plasma Physics - Revised Edition: January 2012athar_acma8254Noch keine Bewertungen
- IDL Programming Techniques 2nd EditionDokument465 SeitenIDL Programming Techniques 2nd EditionAyorinde T TundeNoch keine Bewertungen
- Atmospheric Electrodynamics PDFDokument4 SeitenAtmospheric Electrodynamics PDFAyorinde T TundeNoch keine Bewertungen
- Section 9: Spin and Addition of Angular Momentum: SolutionsDokument5 SeitenSection 9: Spin and Addition of Angular Momentum: SolutionsAyorinde T TundeNoch keine Bewertungen
- Lidar research in South Africa offers atmospheric insightsDokument3 SeitenLidar research in South Africa offers atmospheric insightsAyorinde T TundeNoch keine Bewertungen
- Lecture 8 PDFDokument8 SeitenLecture 8 PDFAyorinde T TundeNoch keine Bewertungen
- QMDokument934 SeitenQMJuan MondáNoch keine Bewertungen
- MechanicsDec05 PDFDokument309 SeitenMechanicsDec05 PDFAyorinde T TundeNoch keine Bewertungen
- Dynamics of a centrifugal governor derived using Lagrange's methodDokument2 SeitenDynamics of a centrifugal governor derived using Lagrange's methodAyorinde T TundeNoch keine Bewertungen
- Sem1 SumDokument84 SeitenSem1 SumAyorinde T TundeNoch keine Bewertungen
- GovernorDokument3 SeitenGovernormedelaidNoch keine Bewertungen
- FileDokument115 SeitenFileAyorinde T Tunde100% (1)
- Phys410 - Final and SolutionsDokument67 SeitenPhys410 - Final and SolutionsAyorinde T TundeNoch keine Bewertungen
- PDE Lecture NotesDokument205 SeitenPDE Lecture NotesMonica Cabria ZambranoNoch keine Bewertungen
- Solution EigenDokument4 SeitenSolution EigenUsman Ghafoor Chaudhary100% (1)
- Classical MechanicsDokument297 SeitenClassical MechanicsOwais Khalid100% (1)
- Classical Mechanics - Marion, ThorntonDokument252 SeitenClassical Mechanics - Marion, ThorntonFRANCISCO C.N. SANTOS100% (4)
- Zhilin 2006 APM EngDokument271 SeitenZhilin 2006 APM EngFatima Om SalmanNoch keine Bewertungen
- Productflyer - 978 0 387 21933 2 PDFDokument1 SeiteProductflyer - 978 0 387 21933 2 PDFAyorinde T TundeNoch keine Bewertungen
- 2 Radiation Fundamentals Essential Radio AstronomyDokument43 Seiten2 Radiation Fundamentals Essential Radio AstronomyAyorinde T TundeNoch keine Bewertungen
- Chapter 07Dokument23 SeitenChapter 07api-3728553Noch keine Bewertungen
- 1 Introduction Essential Radio AstronomyDokument21 Seiten1 Introduction Essential Radio AstronomyAyorinde T TundeNoch keine Bewertungen
- Discovery of Gamma-Ray Pulsations From The Transitional RedbackDokument25 SeitenDiscovery of Gamma-Ray Pulsations From The Transitional RedbackAyorinde T TundeNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Distillation and Vapor Pressure Test of Gasoline Fuel: Fuels TestedDokument3 SeitenDistillation and Vapor Pressure Test of Gasoline Fuel: Fuels TestedReyes, Ishmael Edward John U.Noch keine Bewertungen
- LHCb Seminar on New Physics SearchesDokument32 SeitenLHCb Seminar on New Physics SearchesdedeNoch keine Bewertungen
- Matter-Energy Transformations ExploredDokument22 SeitenMatter-Energy Transformations ExploredAmit BidlanNoch keine Bewertungen
- Bomba Electrica 1500gpm 300HP (Medidas)Dokument1 SeiteBomba Electrica 1500gpm 300HP (Medidas)Fire ChileNoch keine Bewertungen
- Sany HBT8018C-5S (T3) Trailer Pump - 004118Dokument2 SeitenSany HBT8018C-5S (T3) Trailer Pump - 004118اهى عيشه وبن عشها just a lifeNoch keine Bewertungen
- Hydropower, Development & Poverty Reduction in Laos - Promises Realised or Broken (2020)Dokument22 SeitenHydropower, Development & Poverty Reduction in Laos - Promises Realised or Broken (2020)Thulasidasan JeewaratinamNoch keine Bewertungen
- DBB ValveDokument6 SeitenDBB ValveshyamNoch keine Bewertungen
- Makerere University Civil Engineering Assignment on Nalubaale DamDokument8 SeitenMakerere University Civil Engineering Assignment on Nalubaale DamRobert WalusimbiNoch keine Bewertungen
- Thermal Shock Resistant Neoceram Glass-CeramicDokument2 SeitenThermal Shock Resistant Neoceram Glass-CeramicAmândio PintoNoch keine Bewertungen
- Waste Water-Sewage PumpDokument111 SeitenWaste Water-Sewage Pumpcharadeg100Noch keine Bewertungen
- Hajar Trading and Technical Services: Risk AssessmentDokument10 SeitenHajar Trading and Technical Services: Risk Assessmentwinston11Noch keine Bewertungen
- Unit 1Dokument36 SeitenUnit 1MonishNoch keine Bewertungen
- Apocalyptic Rhetoric KritikDokument31 SeitenApocalyptic Rhetoric KritikMilkdelishNoch keine Bewertungen
- Dna60 PDFDokument15 SeitenDna60 PDFAc IdNoch keine Bewertungen
- More power in less space with SMA SUNNY CENTRAL UPDokument4 SeitenMore power in less space with SMA SUNNY CENTRAL UPBrahadeesh Perinkolam MuraliNoch keine Bewertungen
- Ama Drainer & Ama Porter: Vertical Monobloc Dewatering PumpsDokument2 SeitenAma Drainer & Ama Porter: Vertical Monobloc Dewatering Pumpssmita reddyNoch keine Bewertungen
- 320, 320L Medicion de Presiones Bomba Hidraulica PDFDokument181 Seiten320, 320L Medicion de Presiones Bomba Hidraulica PDFrprim100% (2)
- Pneumatic Slotting MachineDokument3 SeitenPneumatic Slotting MachineSwami NathanNoch keine Bewertungen
- Quality Policy and Quality ObjectivesDokument2 SeitenQuality Policy and Quality ObjectivesrabiulfNoch keine Bewertungen
- Mahaan FoodsDokument49 SeitenMahaan Foodsamandeep0001Noch keine Bewertungen
- AC Biasing in TransisterDokument61 SeitenAC Biasing in TransisterHariom RavatNoch keine Bewertungen
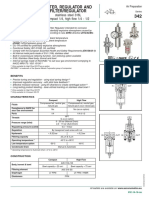
- Numatics Series 342Dokument6 SeitenNumatics Series 342Jebran FarazNoch keine Bewertungen
- ChE 525: Physical & Chemical Principles Mock Board 3Dokument6 SeitenChE 525: Physical & Chemical Principles Mock Board 3Kuo Garol SarongNoch keine Bewertungen
- Volkswagen 2.0L TDI Common Rail Engine Service TrainingDokument90 SeitenVolkswagen 2.0L TDI Common Rail Engine Service TrainingАлла Харютина100% (1)
- محطات الطاقةDokument22 Seitenمحطات الطاقةJoe LewisNoch keine Bewertungen
- Ccu Sem (2010-05-05) PDFDokument181 SeitenCcu Sem (2010-05-05) PDFBích Đỗ DanhNoch keine Bewertungen
- Principle Heat TransferDokument34 SeitenPrinciple Heat TransferZick HaziqNoch keine Bewertungen
- Quantum Engine Series: Ower AtingsDokument2 SeitenQuantum Engine Series: Ower AtingsAlbertoNoch keine Bewertungen
- Cause Effect Analysis of Oil Loss in Edible Oil IndustryDokument60 SeitenCause Effect Analysis of Oil Loss in Edible Oil IndustrySaurabh RaiNoch keine Bewertungen
- R6.3 TR-XXL Parameter Settings ReleaseDokument493 SeitenR6.3 TR-XXL Parameter Settings Releasemishu35Noch keine Bewertungen