Das könnte Ihnen auch gefallen
- Aerospace Actuators 2: Signal-by-Wire and Power-by-WireVon EverandAerospace Actuators 2: Signal-by-Wire and Power-by-WireNoch keine Bewertungen
- Flight Control SystemsDokument14 SeitenFlight Control SystemsRazvan DeaconuNoch keine Bewertungen
- Aircraft Systems and Instrumentation: G Prabhakaran Department of Aeronautical Engineering Jeppiaar Engineering CollegeDokument46 SeitenAircraft Systems and Instrumentation: G Prabhakaran Department of Aeronautical Engineering Jeppiaar Engineering CollegeAntony Jero67% (3)
- Aircraft Control SystemsDokument97 SeitenAircraft Control SystemsSanjay Singh100% (2)
- Flight Control SurfaceDokument39 SeitenFlight Control Surfacevipin muraliNoch keine Bewertungen
- Supersonic PDFDokument10 SeitenSupersonic PDFVijay ChandarNoch keine Bewertungen
- Automatic Flight Control System ClassicaDokument145 SeitenAutomatic Flight Control System ClassicaM S PrasadNoch keine Bewertungen
- Aircraft Instrument SystemsDokument34 SeitenAircraft Instrument SystemsArun Vinthan100% (1)
- AE8302-Elements of Aeronautical Engineering: Reg. NoDokument2 SeitenAE8302-Elements of Aeronautical Engineering: Reg. NoViswanath ViswaNoch keine Bewertungen
- Flight Control ActuationDokument8 SeitenFlight Control ActuationhunganhngocNoch keine Bewertungen
- Aircraft Design - Wing Aerodynamics Design: For More Detailed Notes Please Refer ToDokument90 SeitenAircraft Design - Wing Aerodynamics Design: For More Detailed Notes Please Refer Tojetcovz01100% (1)
- Ice and Rain ProtectionDokument36 SeitenIce and Rain ProtectionDan BowenNoch keine Bewertungen
- Report 5 Landing GearDokument36 SeitenReport 5 Landing GearHalf Peace Jeans100% (3)
- Design and Analysis of Aircraft WingDokument7 SeitenDesign and Analysis of Aircraft WingSai RahulNoch keine Bewertungen
- Drag Reduction in An AirplaneDokument14 SeitenDrag Reduction in An AirplaneDhruvNoch keine Bewertungen
- Automatic Flight ControlDokument24 SeitenAutomatic Flight ControlSade Zamy100% (1)
- Aircraft Performance, Stability and Control With Experiments in FlightDokument8 SeitenAircraft Performance, Stability and Control With Experiments in FlightMohammad AlthafNoch keine Bewertungen
- Ae 6401 Aerodynamics1 Two MarksDokument13 SeitenAe 6401 Aerodynamics1 Two MarksSun Heifer50% (2)
- Ae2302 NolDokument42 SeitenAe2302 NolShwetha BhatNoch keine Bewertungen
- Aircraft Power Plant SystemDokument40 SeitenAircraft Power Plant Systemarsy_rifa_i0% (1)
- Neral Capítulo.1 PDFDokument8 SeitenNeral Capítulo.1 PDFemhidalgoNoch keine Bewertungen
- 2 Mark Q& A, Univ Ques PDFDokument32 Seiten2 Mark Q& A, Univ Ques PDFRamNoch keine Bewertungen
- Avionics 2marks 1Dokument46 SeitenAvionics 2marks 1Ar JunNoch keine Bewertungen
- McDonnell USAF Datcom 1979 Volume 1 User ManualDokument313 SeitenMcDonnell USAF Datcom 1979 Volume 1 User ManualFabian ZenderNoch keine Bewertungen
- Final Aircraft StructureDokument5 SeitenFinal Aircraft StructureAmirul Haqim Mohd JoraNoch keine Bewertungen
- Aircraft StructuresDokument3 SeitenAircraft StructuresVarun Karthikeyan ShettyNoch keine Bewertungen
- M5 TotalDokument16 SeitenM5 TotalJoe HoNoch keine Bewertungen
- ASI Full NotesDokument171 SeitenASI Full NotesmuthumariNoch keine Bewertungen
- ME3608 Aeroelasticity #1Dokument31 SeitenME3608 Aeroelasticity #1djtj89Noch keine Bewertungen
- Elements of Airplane Performance: ME 4021: Flight Dynamics Fazle Rabbi SirDokument42 SeitenElements of Airplane Performance: ME 4021: Flight Dynamics Fazle Rabbi SirRafiqul IslamNoch keine Bewertungen
- Aircraft Landing Gear System: Presented By: Rishikesh K. Singh Roll No. 134103054 Guided by Dr. Ujjwal Kumar SahaDokument39 SeitenAircraft Landing Gear System: Presented By: Rishikesh K. Singh Roll No. 134103054 Guided by Dr. Ujjwal Kumar SahaindahNoch keine Bewertungen
- Aerospace Structures: Chapter 1 (Introduction)Dokument12 SeitenAerospace Structures: Chapter 1 (Introduction)John BrennanNoch keine Bewertungen
- Thin AirfoilDokument25 SeitenThin AirfoilmgskumarNoch keine Bewertungen
- V-N DiagramDokument34 SeitenV-N Diagrambaddigam dhananjaneya reddyNoch keine Bewertungen
- Module 14 Propulsion Notes-3 PDFDokument5 SeitenModule 14 Propulsion Notes-3 PDFastikNoch keine Bewertungen
- Aerodynamics Basics of AirfoilDokument63 SeitenAerodynamics Basics of AirfoilaeroromeosNoch keine Bewertungen
- Aircraft Structures 1 Exercises (With Solutions)Dokument7 SeitenAircraft Structures 1 Exercises (With Solutions)geraldx777Noch keine Bewertungen
- Flight Control SystemDokument15 SeitenFlight Control SystemArcer 97100% (1)
- Linear AerodynamicsDokument45 SeitenLinear Aerodynamicsparvaz747Noch keine Bewertungen
- Structural Components of Aircraft: Ae 6502 Aircraft Structures - Ii Unit V Stress Analysis of Wing and FuselageDokument20 SeitenStructural Components of Aircraft: Ae 6502 Aircraft Structures - Ii Unit V Stress Analysis of Wing and FuselageDamo Daran GNoch keine Bewertungen
- GATE Aero-Propulsion by IGCDokument256 SeitenGATE Aero-Propulsion by IGCParth PatelNoch keine Bewertungen
- 2.1 Introduction To Flight Control SystemsDokument38 Seiten2.1 Introduction To Flight Control SystemsFanhang ZhangNoch keine Bewertungen
- Wing Layout Structure: To Carry The Distributed and Concentrated Loads Prescribed by The Airwortheness RequirementDokument29 SeitenWing Layout Structure: To Carry The Distributed and Concentrated Loads Prescribed by The Airwortheness Requirementappanna_100% (1)
- Aircraft PerformanceDokument2 SeitenAircraft PerformanceAishwarya Ravi0% (1)
- Aircraft StabilityDokument126 SeitenAircraft StabilitymunirnadirNoch keine Bewertungen
- Stability DerivativesDokument3 SeitenStability DerivativesGurunath AeroNoch keine Bewertungen
- Aerodynamics KLMDokument43 SeitenAerodynamics KLMarunNoch keine Bewertungen
- Unmanned Aircraft SystemsVon EverandUnmanned Aircraft SystemsElla AtkinsNoch keine Bewertungen
- Enhanced Avionics System A Complete Guide - 2020 EditionVon EverandEnhanced Avionics System A Complete Guide - 2020 EditionNoch keine Bewertungen
- Turbulences: Remeiniscences of of an Airline PilotVon EverandTurbulences: Remeiniscences of of an Airline PilotNoch keine Bewertungen
- Aerospace Actuators V3: European Commercial Aircraft and Tiltrotor AircraftVon EverandAerospace Actuators V3: European Commercial Aircraft and Tiltrotor AircraftNoch keine Bewertungen
- Wing Theory in Supersonic Flow: International Series of Monographs in Aeronautics and AstronauticsVon EverandWing Theory in Supersonic Flow: International Series of Monographs in Aeronautics and AstronauticsNoch keine Bewertungen
- Unit - I Aircraft Control SystemsDokument73 SeitenUnit - I Aircraft Control SystemsVishnu Kiran100% (1)
- Aircraft CTRL SystemsDokument182 SeitenAircraft CTRL SystemslhomssiNoch keine Bewertungen
- Fundamentals of Aircraft SystemsDokument353 SeitenFundamentals of Aircraft SystemsVishal Wagh100% (4)
- Propulsion 2 NotesDokument84 SeitenPropulsion 2 NotesTAMILSELVAM NALLUSAMY50% (2)
- Rockets and Missiles Notes PDFDokument146 SeitenRockets and Missiles Notes PDFTAMILSELVAM NALLUSAMY97% (38)
- GTE Combustion ChamberDokument33 SeitenGTE Combustion ChamberTAMILSELVAM NALLUSAMYNoch keine Bewertungen
- Thrust Equation For A Gas Turbine EngineDokument4 SeitenThrust Equation For A Gas Turbine EngineTAMILSELVAM NALLUSAMYNoch keine Bewertungen
- Aircraft Structures II Laboratory Manual With Model Calculations and GraphsDokument52 SeitenAircraft Structures II Laboratory Manual With Model Calculations and GraphsTAMILSELVAM NALLUSAMY100% (10)
- Microwave Landing SystemDokument31 SeitenMicrowave Landing SystemKaung MyatToeNoch keine Bewertungen
- Tirupati Airport DataDokument14 SeitenTirupati Airport DataveeteeNoch keine Bewertungen
- Q CodesDokument14 SeitenQ CodesWIN MIN100% (1)
- Sistemi Ils (Instrument Landing Systems) E Mls (Microwave Landing Systems)Dokument44 SeitenSistemi Ils (Instrument Landing Systems) E Mls (Microwave Landing Systems)Puneetha MadhuNoch keine Bewertungen
- Cessna Citation II y VDokument657 SeitenCessna Citation II y VHenry Blandon100% (5)
- MLSDokument50 SeitenMLSMuhammad Waqar Aslam ChNoch keine Bewertungen
- Chapter 10 - MLSDokument8 SeitenChapter 10 - MLSEl Shazly SaidNoch keine Bewertungen
- Notam's IllustratedDokument111 SeitenNotam's Illustrated莊益汉100% (3)
- Dtic Ada096265Dokument155 SeitenDtic Ada096265Rnav rnavNoch keine Bewertungen
- Aircraft Systems and Instruments PDFDokument132 SeitenAircraft Systems and Instruments PDFnaziaNoch keine Bewertungen
- Airport EngineeringDokument50 SeitenAirport EngineeringPriyaNoch keine Bewertungen
- Falcon 20 EngDokument2 SeitenFalcon 20 EngAria IraniNoch keine Bewertungen
- REVIEWER (NAV AIDS) .1pdf PDFDokument26 SeitenREVIEWER (NAV AIDS) .1pdf PDFGemalyn NacarioNoch keine Bewertungen
- Acn MCQDokument52 SeitenAcn MCQBadal MachchharNoch keine Bewertungen
- Dgca Module 13 Part 02Dokument25 SeitenDgca Module 13 Part 02Monish RazaNoch keine Bewertungen
- Radio NavigationDokument135 SeitenRadio NavigationYahya Yıldırım87% (15)
- d1.2 The Endless Runway Background v3Dokument161 Seitend1.2 The Endless Runway Background v3vprochockyNoch keine Bewertungen
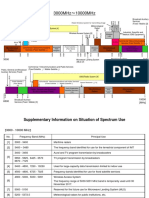
- 3000Mhz 10000Mhz: DSRC, Etc.Dokument2 Seiten3000Mhz 10000Mhz: DSRC, Etc.Seno TribrotoNoch keine Bewertungen
- Microwave Landing System (MLS) : Principle of OperationDokument11 SeitenMicrowave Landing System (MLS) : Principle of OperationSarah Rivie Mae BeloroNoch keine Bewertungen
- Radio Navigation QBDokument64 SeitenRadio Navigation QBVijay Samuel J100% (3)
- Aixm5 1-HighlevelDokument3 SeitenAixm5 1-HighlevelpelengNoch keine Bewertungen
- Microwave Landing System: Name: Nakkanaboina Subhash ROLLNO: 18BB1M1109 Branch: AvionicsDokument45 SeitenMicrowave Landing System: Name: Nakkanaboina Subhash ROLLNO: 18BB1M1109 Branch: AvionicsSubhash NakkanaboinaNoch keine Bewertungen
- ECCAIRS Aviation 1.3.0.12 (VL For AttrID 390 - Events)Dokument43 SeitenECCAIRS Aviation 1.3.0.12 (VL For AttrID 390 - Events)contra_pronosticoNoch keine Bewertungen
- Notice: Airport Noise Compatibility Program: Noise Exposure Maps— Air Navigational Aids Monitor Status ChangeDokument2 SeitenNotice: Airport Noise Compatibility Program: Noise Exposure Maps— Air Navigational Aids Monitor Status ChangeJustia.comNoch keine Bewertungen
- 8260.3B - U.S TerpsDokument436 Seiten8260.3B - U.S TerpsSergio GuevaraNoch keine Bewertungen
- Lecture 1-Introduction To RANDokument20 SeitenLecture 1-Introduction To RANzuliana100% (1)
- Microwave Landing System (MLS)Dokument11 SeitenMicrowave Landing System (MLS)Sarah Rivie Mae BeloroNoch keine Bewertungen
- The Notam Code Decode: AGA Lighting Facilities (L)Dokument11 SeitenThe Notam Code Decode: AGA Lighting Facilities (L)Rangga PratamaNoch keine Bewertungen
- Notam DecodeDokument12 SeitenNotam DecodeSergeLoginovNoch keine Bewertungen
- Notam DecodeDokument16 SeitenNotam DecodeEduardo LuqueNoch keine Bewertungen