Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Rules Keep It Saada Amal Kia Hasil Hua Kyu Kyu Kyu Ruqiyya RocksDokument2 SeitenRules Keep It Saada Amal Kia Hasil Hua Kyu Kyu Kyu Ruqiyya RocksAfzaal FiazNoch keine Bewertungen
- Assignment n1Dokument1 SeiteAssignment n1Afzaal FiazNoch keine Bewertungen
- Experiment No: Objective: ApparatusDokument3 SeitenExperiment No: Objective: ApparatusAfzaal FiazNoch keine Bewertungen
- Submitted To Mam Amna Noor Submitted by 14-MCE-42,44,46 Subject Lab ManualDokument2 SeitenSubmitted To Mam Amna Noor Submitted by 14-MCE-42,44,46 Subject Lab ManualAfzaal FiazNoch keine Bewertungen
- Multi Evaporator Compressio N System: Automatic AC Doo RDokument1 SeiteMulti Evaporator Compressio N System: Automatic AC Doo RAfzaal FiazNoch keine Bewertungen
- New Doc 2017-03-05Dokument2 SeitenNew Doc 2017-03-05Afzaal FiazNoch keine Bewertungen
- Procedure: Experiment #2 ObjectiveDokument2 SeitenProcedure: Experiment #2 ObjectiveAfzaal FiazNoch keine Bewertungen
- Heat Pump TrainerDokument6 SeitenHeat Pump TrainerAfzaal FiazNoch keine Bewertungen
- Book Reviews: ContrastsDokument2 SeitenBook Reviews: ContrastsAfzaal FiazNoch keine Bewertungen
- Grinding PDFDokument1 SeiteGrinding PDFAfzaal FiazNoch keine Bewertungen
- Bernoulli EquationDokument49 SeitenBernoulli EquationAfzaal Fiaz100% (1)
- TorrentDokument10 SeitenTorrentAfzaal FiazNoch keine Bewertungen
- Strategy For Simplifying MatricesDokument1 SeiteStrategy For Simplifying MatricesAfzaal FiazNoch keine Bewertungen
- 2-Stage Reciprocating Air CompressorDokument3 Seiten2-Stage Reciprocating Air CompressorAfzaal Fiaz100% (1)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Quantitative Assessment of Player Performance... (Madan Gopal Jhanwar, MS, 201202018)Dokument69 SeitenQuantitative Assessment of Player Performance... (Madan Gopal Jhanwar, MS, 201202018)Anonymous zwnFXURJNoch keine Bewertungen
- 2021 10 11 - Intro ML - InsermDokument41 Seiten2021 10 11 - Intro ML - Insermpo esperitableNoch keine Bewertungen
- PLC Programming With RSLogix 500Dokument132 SeitenPLC Programming With RSLogix 500kemo_750252831Noch keine Bewertungen
- Brochure - Digilogic Systems PVT Ltd.Dokument28 SeitenBrochure - Digilogic Systems PVT Ltd.ManojGRamakrishnaNoch keine Bewertungen
- Hypothesis Testing in Stata PDFDokument9 SeitenHypothesis Testing in Stata PDFMarisela FuentesNoch keine Bewertungen
- Arm SubassemblyDokument4 SeitenArm Subassemblyapi-541897663Noch keine Bewertungen
- Strike RiskDokument4 SeitenStrike RiskAdilson Leite ProençaNoch keine Bewertungen
- KW Kwh/YrDokument3 SeitenKW Kwh/YrHaris BaigNoch keine Bewertungen
- Oracle Alerts: Mona Lisa SahuDokument35 SeitenOracle Alerts: Mona Lisa Sahuanishokm2992Noch keine Bewertungen
- Certification Authorities Software Team (CAST) Position Paper CAST-30Dokument12 SeitenCertification Authorities Software Team (CAST) Position Paper CAST-30Adeen KhanNoch keine Bewertungen
- Gear BoxDokument36 SeitenGear BoxNimoNoch keine Bewertungen
- ISUOG Basic Training: Fetal Biometry - Dating, Assessing Size & Estimating Fetal WeightDokument33 SeitenISUOG Basic Training: Fetal Biometry - Dating, Assessing Size & Estimating Fetal WeightRolando DiazNoch keine Bewertungen
- Fatique Lecture NotesDokument41 SeitenFatique Lecture NotesMarcel SilvaNoch keine Bewertungen
- Newton First Law of MotionDokument6 SeitenNewton First Law of MotionKin ChristineNoch keine Bewertungen
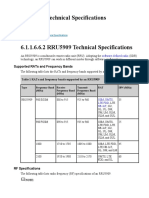
- RRU5909 Technical SpecificationsDokument7 SeitenRRU5909 Technical SpecificationsDmitry059100% (1)
- Reduced Complexity Decision Feedback Equalizer For Supporting High Mobility in WimaxDokument5 SeitenReduced Complexity Decision Feedback Equalizer For Supporting High Mobility in Wimaxjoy0302Noch keine Bewertungen
- Warn 2013-2014 Application GuideDokument75 SeitenWarn 2013-2014 Application Guideapi-238139220Noch keine Bewertungen
- Technical Drafting I: (Manual Drafting) 2Nd SemesterDokument18 SeitenTechnical Drafting I: (Manual Drafting) 2Nd SemesterhakkensNoch keine Bewertungen
- Resolución de Problema en FísicaDokument4 SeitenResolución de Problema en FísicaCindy ChiribogaNoch keine Bewertungen
- Application SMS MD720-3 DOKU V2 1 enDokument52 SeitenApplication SMS MD720-3 DOKU V2 1 enerendira77Noch keine Bewertungen
- Huaweigpon PDFDokument1 SeiteHuaweigpon PDFRobNoch keine Bewertungen
- BearingDokument4 SeitenBearingJITENDRA BISWALNoch keine Bewertungen
- Struktur Baja 1Dokument33 SeitenStruktur Baja 1Agung S NurcahyanaNoch keine Bewertungen
- Interview Q SASDokument43 SeitenInterview Q SAShimaNoch keine Bewertungen
- SLES Concentration Effect On The Rheolog TraducidoDokument22 SeitenSLES Concentration Effect On The Rheolog TraducidoJose GamezNoch keine Bewertungen
- QP NTSE Stage 1 2016 17 AndhraPradeshDokument27 SeitenQP NTSE Stage 1 2016 17 AndhraPradeshsudhir_narang_3Noch keine Bewertungen
- CR EstimateDokument307 SeitenCR EstimateGani AnosaNoch keine Bewertungen
- Solutions and Solubility 2021Dokument3 SeitenSolutions and Solubility 2021Mauro De LollisNoch keine Bewertungen
- Chapter OverviewDokument57 SeitenChapter OverviewWajiha SharifNoch keine Bewertungen
- How To Build An Offshore CraneDokument5 SeitenHow To Build An Offshore CraneWestMarineNoch keine Bewertungen