Das könnte Ihnen auch gefallen
- Operação M64Dokument347 SeitenOperação M64Luciano MalheiroNoch keine Bewertungen
- Maintenance Manual: Fanuc Ac Spinole ServoDokument152 SeitenMaintenance Manual: Fanuc Ac Spinole Servovasiliy vasilievichNoch keine Bewertungen
- Yaskawa Servopack RepairDokument17 SeitenYaskawa Servopack RepairVikash KumarNoch keine Bewertungen
- Main Card 3 E48090-450-38-C Opus 5000 1911-1103 Okuma Datasheet PDFDokument7 SeitenMain Card 3 E48090-450-38-C Opus 5000 1911-1103 Okuma Datasheet PDFaaamil13Noch keine Bewertungen
- Fanuc PM PDFDokument26 SeitenFanuc PM PDFnamnp2007Noch keine Bewertungen
- 63484EN FanucDokument476 Seiten63484EN FanucNatKThNoch keine Bewertungen
- EN - 840Dsl Kinematic Chain Milling 0408 - 2019-03Dokument322 SeitenEN - 840Dsl Kinematic Chain Milling 0408 - 2019-03F.CNoch keine Bewertungen
- BNP b2267 (Eng) CDokument317 SeitenBNP b2267 (Eng) CibraheemNoch keine Bewertungen
- Yasnac J50L Upgrading Function ManualDokument76 SeitenYasnac J50L Upgrading Function ManualsunhuynhNoch keine Bewertungen
- Fanuc 6mDokument3 SeitenFanuc 6mLưu QuýNoch keine Bewertungen
- Manual FanucDokument6 SeitenManual FanucWermeson SousaNoch keine Bewertungen
- Electrico Vtc200cDokument140 SeitenElectrico Vtc200cJefferson TeixeiraNoch keine Bewertungen
- 54765e PDFDokument152 Seiten54765e PDFCristobal PerezNoch keine Bewertungen
- Yasnac J300 PLC Programming ManualDokument224 SeitenYasnac J300 PLC Programming Manualsunhuynh100% (1)
- M100741H MAI Memex Memory Upgrade For Fanuc 16 182Dokument32 SeitenM100741H MAI Memex Memory Upgrade For Fanuc 16 182Nica BogdanNoch keine Bewertungen
- 65264EN Servo Tuning Alfa - FanucDokument58 Seiten65264EN Servo Tuning Alfa - FanucpkrkaranNoch keine Bewertungen
- Fanuc 0id SRAM BackupDokument8 SeitenFanuc 0id SRAM BackupAndersonDiehlNoch keine Bewertungen
- Fanuc 10 Fanuc 11 Memory Backup ProceduresDokument1 SeiteFanuc 10 Fanuc 11 Memory Backup ProceduresLeonardusNoch keine Bewertungen
- Fanuc Page 8 (Para Spindle and Pro 9000)Dokument16 SeitenFanuc Page 8 (Para Spindle and Pro 9000)Hoangvinh Duong100% (1)
- Fanuc 0i Control Packages Memory Backup and Restore GuideDokument2 SeitenFanuc 0i Control Packages Memory Backup and Restore GuideLeonardusNoch keine Bewertungen
- Meldas 60 SeriesDokument443 SeitenMeldas 60 SeriesAlinhart EquipamentosNoch keine Bewertungen
- Mazak Mazatech v-515 en v1Dokument8 SeitenMazak Mazatech v-515 en v1Mauricio A. Tamayo RamirezNoch keine Bewertungen
- BNP-A2745 - M2 Programming ManualDokument476 SeitenBNP-A2745 - M2 Programming ManualchanhNoch keine Bewertungen
- 41-NC Maint PDFDokument510 Seiten41-NC Maint PDFakirenaviNoch keine Bewertungen
- M700V/M70 Series PLC Programming ManualDokument835 SeitenM700V/M70 Series PLC Programming ManualAce RimmerNoch keine Bewertungen
- B64393en PDFDokument1.076 SeitenB64393en PDFuongquocvu100% (3)
- Maintaining AC Servo AmplifiersDokument227 SeitenMaintaining AC Servo AmplifiersBa Duy100% (1)
- Yaskawa CACR-IR Series ManualDokument113 SeitenYaskawa CACR-IR Series ManualsunhuynhNoch keine Bewertungen
- FANUC PMC-MODEL SA1/SB7 Supplemental Programming Manual (LADDER LanguageDokument145 SeitenFANUC PMC-MODEL SA1/SB7 Supplemental Programming Manual (LADDER Languagechinhctm100% (2)
- VMC Maintenance Manual (Alarm) : (Mynx 6500/)Dokument156 SeitenVMC Maintenance Manual (Alarm) : (Mynx 6500/)Sagar HankareNoch keine Bewertungen
- BNP-A3040 Meldas5000 CNCDokument175 SeitenBNP-A3040 Meldas5000 CNCchidambaram kasiNoch keine Bewertungen
- FANUC 30i/31i/32i SERIES BOOT SYSTEM APPENDIX C SCREEN AND OPERATION GUIDEDokument6 SeitenFANUC 30i/31i/32i SERIES BOOT SYSTEM APPENDIX C SCREEN AND OPERATION GUIDERelu ChiruNoch keine Bewertungen
- FANUC Series 0 / 00: Remote BufferDokument79 SeitenFANUC Series 0 / 00: Remote BufferMetalurgica VISILUNoch keine Bewertungen
- Yasnac MX1 Maintenance Manual TOE-C843-7.35D - MX1Dokument75 SeitenYasnac MX1 Maintenance Manual TOE-C843-7.35D - MX1Bill WarnerNoch keine Bewertungen
- IO Unit-ModelA-Connection and Maintenance ManualDokument24 SeitenIO Unit-ModelA-Connection and Maintenance ManualSebautomatismeNoch keine Bewertungen
- Fanucalpha FSSB SetupDokument76 SeitenFanucalpha FSSB SetupАлексей АлямовскийNoch keine Bewertungen
- Fanuc CMR - DMRDokument7 SeitenFanuc CMR - DMRbewideNoch keine Bewertungen
- 66234en PDFDokument532 Seiten66234en PDFMarian ButerchiNoch keine Bewertungen
- Fanuc: Spindle ControlDokument8 SeitenFanuc: Spindle ControlTony AntonyNoch keine Bewertungen
- Fanuc 11m v70Dokument3 SeitenFanuc 11m v70slaven67Noch keine Bewertungen
- Mitsubishi Manuals 924 PDFDokument46 SeitenMitsubishi Manuals 924 PDFPablo M. Estrada Aguilar0% (1)
- LED Indicator Guide for Machine HardwareDokument34 SeitenLED Indicator Guide for Machine HardwareAntonioCanestriJúniorNoch keine Bewertungen
- Servo/Spindle's Troubleshooting: 9.1.3.1 Troubleshooting at Power ONDokument26 SeitenServo/Spindle's Troubleshooting: 9.1.3.1 Troubleshooting at Power ONjaganksNoch keine Bewertungen
- CITIZEN A32 Programming & Orientation ManualDokument158 SeitenCITIZEN A32 Programming & Orientation Manual88No1Fan100% (2)
- DDB72083054ADokument399 SeitenDDB72083054ADEISON100% (1)
- AC Spindle Drives for Machine ToolsDokument150 SeitenAC Spindle Drives for Machine ToolsBao TranNoch keine Bewertungen
- Cyclone Fanuc OTADokument68 SeitenCyclone Fanuc OTAPham LongNoch keine Bewertungen
- BNP b2215 (Eng) ZDokument138 SeitenBNP b2215 (Eng) ZRuslanNoch keine Bewertungen
- ES400 F 21iMB Mag Zero Set 033007Dokument3 SeitenES400 F 21iMB Mag Zero Set 033007Julián MorelosNoch keine Bewertungen
- Parameters 16i MADokument363 SeitenParameters 16i MAGerardo AlcarazNoch keine Bewertungen
- Specifications: FANUC Series 16/18-MB/TB/MC/TC FANUC Series 16Dokument15 SeitenSpecifications: FANUC Series 16/18-MB/TB/MC/TC FANUC Series 16avalente112Noch keine Bewertungen
- ME32-121-R02 OPERATION MANUAL 2ndDokument24 SeitenME32-121-R02 OPERATION MANUAL 2ndFerenc UngváriNoch keine Bewertungen
- CSLABMANUALDokument99 SeitenCSLABMANUALGOKUL RNoch keine Bewertungen
- T60TDokument39 SeitenT60TMourad BenderradjiNoch keine Bewertungen
- s5 Lab Manual Full FinalDokument45 Seitens5 Lab Manual Full FinalananyadeviashokkumarNoch keine Bewertungen
- Control IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4718 ADokument17 SeitenControl IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4718 ASledge HammerNoch keine Bewertungen
- Motor Protection RelayDokument4 SeitenMotor Protection RelayEmilio Carneiro NascimentoNoch keine Bewertungen
- Electrical Engineering Lab Manual For II Mech Part IDokument54 SeitenElectrical Engineering Lab Manual For II Mech Part IArivumani80% (5)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Renishaw Ballbar LaserDokument21 SeitenRenishaw Ballbar LaserPham LongNoch keine Bewertungen
- Mitsubishi Manual Fx5-40ssc AdvancedDokument598 SeitenMitsubishi Manual Fx5-40ssc AdvancedPham LongNoch keine Bewertungen
- Yuasa International: Full 4 Axis vs. Programmable Indexer?Dokument4 SeitenYuasa International: Full 4 Axis vs. Programmable Indexer?Pham LongNoch keine Bewertungen
- H PulseDokument18 SeitenH PulsePham LongNoch keine Bewertungen
- CNC Advanced ConceptsDokument100 SeitenCNC Advanced ConceptsPham LongNoch keine Bewertungen
- NSK CAT E1102m B234-243Dokument5 SeitenNSK CAT E1102m B234-243LeandroNoch keine Bewertungen
- NSK CAT E1102m B234-243Dokument5 SeitenNSK CAT E1102m B234-243LeandroNoch keine Bewertungen
- H PulseDokument18 SeitenH PulsePham LongNoch keine Bewertungen
- NSK CAT E1102m B234-243Dokument5 SeitenNSK CAT E1102m B234-243LeandroNoch keine Bewertungen
- TM A1000sw 063Dokument36 SeitenTM A1000sw 063Pham LongNoch keine Bewertungen
- Handle PulseDokument17 SeitenHandle PulsePham LongNoch keine Bewertungen
- Micro Smart ManualDokument455 SeitenMicro Smart ManualDaniel HilariNoch keine Bewertungen
- Delta Ispsoft M en 20130118Dokument617 SeitenDelta Ispsoft M en 20130118Daniel Iurck VosgerauNoch keine Bewertungen
- G Code List OkumaDokument10 SeitenG Code List OkumaPham Long50% (2)
- NextMove Input and Output CircuitDokument2 SeitenNextMove Input and Output CircuitPham LongNoch keine Bewertungen
- SU-matic Instruction ManualDokument12 SeitenSU-matic Instruction ManualPham LongNoch keine Bewertungen
- GT User Manual Revision 1.10Dokument66 SeitenGT User Manual Revision 1.10Pham LongNoch keine Bewertungen
- Radioactive PrincipleDokument17 SeitenRadioactive PrincipleHenry LingNoch keine Bewertungen
- Tny267pn PDFDokument24 SeitenTny267pn PDFPham LongNoch keine Bewertungen
- NX 10 For Engineering Design PDFDokument207 SeitenNX 10 For Engineering Design PDFAnonymous EVAzqFeburNoch keine Bewertungen
- UE-42-09-fiber Optic Catalog Med PDFDokument40 SeitenUE-42-09-fiber Optic Catalog Med PDFPham LongNoch keine Bewertungen
- Parallel Port Interfacing Inpout32 DLL Source Code and TheoryDokument2 SeitenParallel Port Interfacing Inpout32 DLL Source Code and TheoryPham LongNoch keine Bewertungen
- Manual For USB To 9 Pin RS 232 Serial Adaptor PDFDokument20 SeitenManual For USB To 9 Pin RS 232 Serial Adaptor PDFPham LongNoch keine Bewertungen
- Analog Drive Configuration and Setup NotesDokument3 SeitenAnalog Drive Configuration and Setup NotesPham LongNoch keine Bewertungen
- A F700 PID ControlDokument8 SeitenA F700 PID ControlPham LongNoch keine Bewertungen
- CH 17 SCR IGBTDokument14 SeitenCH 17 SCR IGBTPham LongNoch keine Bewertungen
- Rs 232 For Ka CounterDokument4 SeitenRs 232 For Ka CounterPham LongNoch keine Bewertungen
- 7mbp75ra060 PDFDokument8 Seiten7mbp75ra060 PDFPham LongNoch keine Bewertungen
- 6sn1145 1aa01 0aa2 ManualDokument485 Seiten6sn1145 1aa01 0aa2 ManualjohnysonycumNoch keine Bewertungen
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Dokument10 SeitenInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768ardan fadilahNoch keine Bewertungen
- 25 KV Voltage Transformer: Indoor 60 HertzDokument2 Seiten25 KV Voltage Transformer: Indoor 60 HertzESDAPERNoch keine Bewertungen
- Programmable Voltage Source For Dynamic LoadDokument7 SeitenProgrammable Voltage Source For Dynamic Loadjaneshpaul kopperlaNoch keine Bewertungen
- Duderstadt Hamilton Nuclear Reactor AnalysisDokument670 SeitenDuderstadt Hamilton Nuclear Reactor AnalysisThalia Xenofontos100% (4)
- Dfe Manual Eng r2Dokument43 SeitenDfe Manual Eng r2rebebonghanoyNoch keine Bewertungen
- Tds Condenerg Digital Type Linear Heat Detector Sensor Cable and Control Unit f2 c2 Rev2 en 2023Dokument6 SeitenTds Condenerg Digital Type Linear Heat Detector Sensor Cable and Control Unit f2 c2 Rev2 en 2023Brayan DiazNoch keine Bewertungen
- Variable ResistorsDokument4 SeitenVariable Resistorsdev achandyNoch keine Bewertungen
- IOC Tr. Oil Test ReportDokument3 SeitenIOC Tr. Oil Test ReportMalini VenkatesanNoch keine Bewertungen
- 防災インフラセミナー(2014年10月31日)配布資料9Dokument9 Seiten防災インフラセミナー(2014年10月31日)配布資料9ADBJRONoch keine Bewertungen
- Battery Charging 1Dokument21 SeitenBattery Charging 1Bilal QasimNoch keine Bewertungen
- Pm0048f - Ampiid Slis b1c and b1vDokument2 SeitenPm0048f - Ampiid Slis b1c and b1vImran TajNoch keine Bewertungen
- Security Alarm For Doors, Almirah, Cupboards Using Opam Design in Protieus 4 1Dokument30 SeitenSecurity Alarm For Doors, Almirah, Cupboards Using Opam Design in Protieus 4 1DebashishParida100% (1)
- GIS OverviewDokument16 SeitenGIS OverviewNur FajarNoch keine Bewertungen
- 1SBC101140C0201-Contactors For Capacitors 2Dokument34 Seiten1SBC101140C0201-Contactors For Capacitors 2thiago_gomes7953Noch keine Bewertungen
- FG 3 Ec460cDokument5 SeitenFG 3 Ec460cAstrit StratiNoch keine Bewertungen
- TABLE 1.10 Limiting Effect Cable Short-Circuit Currents 208 Volts, Three PhaseDokument23 SeitenTABLE 1.10 Limiting Effect Cable Short-Circuit Currents 208 Volts, Three PhaseJuan Carlos Perez ParraNoch keine Bewertungen
- Replacement of HV CablesDokument41 SeitenReplacement of HV CablesMahdiNoch keine Bewertungen
- Rele Temporizador ScheinederDokument4 SeitenRele Temporizador ScheinederJasson da GiedreNoch keine Bewertungen
- 2015 ET Solutions AG Business Introduction PresentationDokument26 Seiten2015 ET Solutions AG Business Introduction Presentationmidas33Noch keine Bewertungen
- Webinar FAQDokument6 SeitenWebinar FAQHernan NarezoNoch keine Bewertungen
- Norma IEC 62353-2014 InglêsDokument134 SeitenNorma IEC 62353-2014 InglêsClodoaldo BorgesNoch keine Bewertungen
- Elecricity Multiple Choice Questions Set 1Dokument2 SeitenElecricity Multiple Choice Questions Set 1Joel OkohNoch keine Bewertungen
- Aegis Multifunction RelayDokument4 SeitenAegis Multifunction RelaySuranjana DasNoch keine Bewertungen
- XW Pro AC Coupling Solutions Guide: 990-6421 December 2020Dokument16 SeitenXW Pro AC Coupling Solutions Guide: 990-6421 December 2020Anselmo Aguado cortesNoch keine Bewertungen
- ERRU (Electronic Rectification and Regulating Unit)Dokument19 SeitenERRU (Electronic Rectification and Regulating Unit)Dilpal50% (2)
- Lecture 5-6Dokument22 SeitenLecture 5-6Mouath AlsebaieNoch keine Bewertungen
- CAT - SIEMENS - LV-Power Distribution and Electrical Installation TechnologyDokument1.108 SeitenCAT - SIEMENS - LV-Power Distribution and Electrical Installation TechnologymarcosNoch keine Bewertungen
- Wesm Wesmmnm 64Dokument64 SeitenWesm Wesmmnm 64rudy.langeNoch keine Bewertungen
- IPM 120 Series: Internal Permanent Magnet MotorsDokument3 SeitenIPM 120 Series: Internal Permanent Magnet MotorsPaul CholewaNoch keine Bewertungen
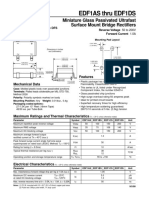
- EDF1AS Thru EDF1DS: Miniature Glass Passivated Ultrafast Surface Mount Bridge RectifiersDokument2 SeitenEDF1AS Thru EDF1DS: Miniature Glass Passivated Ultrafast Surface Mount Bridge RectifiersCarlosNoch keine Bewertungen