Das könnte Ihnen auch gefallen
- Informe Postproceso-Cinemático-Y-StopgoDokument6 SeitenInforme Postproceso-Cinemático-Y-StopgoDavid Quiroga VelascoNoch keine Bewertungen
- Problema Directo UTMDokument3 SeitenProblema Directo UTMRodrigo Tudela VillafuerteNoch keine Bewertungen
- 10 Problema Geodésico DirectoDokument9 Seiten10 Problema Geodésico DirectoCristian Andre Mejia Chachapoyas0% (1)
- Plancha 137 CocuyDokument1 SeitePlancha 137 CocuybuziracoNoch keine Bewertungen
- SurvCe 6 GPS Raw OnlyDokument9 SeitenSurvCe 6 GPS Raw Onlycecil5alfonso5ariza5Noch keine Bewertungen
- Georreferenciacion Tramo 01 - Rev - 01 PDFDokument93 SeitenGeorreferenciacion Tramo 01 - Rev - 01 PDFjairo sanchezNoch keine Bewertungen
- Nivelación DigitalDokument18 SeitenNivelación DigitaledgarmartinezcNoch keine Bewertungen
- Formato Unico para Certificacion v.3.0Dokument18 SeitenFormato Unico para Certificacion v.3.0Killder Hans Gomez MartinezNoch keine Bewertungen
- Paper ProyectoDokument10 SeitenPaper ProyectoCristian LoraNoch keine Bewertungen
- Agisoft Metashape: Informe de Procesamiento 10 April 2023Dokument10 SeitenAgisoft Metashape: Informe de Procesamiento 10 April 2023CARMENNoch keine Bewertungen
- Calcular distancia entre puntos terrestresDokument6 SeitenCalcular distancia entre puntos terrestresFrank HANoch keine Bewertungen
- 13-Corrección Refracción Curvatura Terrestre - Doc-Manual de Instrucciones Estación Total TOPCON GPT 2006Dokument1 Seite13-Corrección Refracción Curvatura Terrestre - Doc-Manual de Instrucciones Estación Total TOPCON GPT 2006Juan PabloNoch keine Bewertungen
- LevantamientoTopografico5LadosDokument12 SeitenLevantamientoTopografico5LadosRicardo Paolo Pfuyo MoraNoch keine Bewertungen
- AllyNAV R26 GNSS RECEIVER Especificaciones EPTECDokument2 SeitenAllyNAV R26 GNSS RECEIVER Especificaciones EPTECByron ArreguiNoch keine Bewertungen
- Proyecto Final Via MedellínDokument22 SeitenProyecto Final Via MedellínJUAN SEBASTIAN LOPEZ MACEANoch keine Bewertungen
- Levantar superficies altimétricamente según especificaciones técnicas de topografíaDokument5 SeitenLevantar superficies altimétricamente según especificaciones técnicas de topografíaAnonymous njLiXS100% (1)
- Descripción de La Estación Gnss MedeDokument2 SeitenDescripción de La Estación Gnss MedewillNoch keine Bewertungen
- 23 EspecificacionesDokument3 Seiten23 EspecificacionesTomas Santiago Hanccoccallo PauccaraNoch keine Bewertungen
- Traspaso GymDokument1 SeiteTraspaso GymAna Maria Avendaño BaenaNoch keine Bewertungen
- Precisión redes geodésicas NTC 5204Dokument1 SeitePrecisión redes geodésicas NTC 5204Edizon Silva0% (1)
- Rinex Correciones Diferenciales Postproceso Pdop DopDokument9 SeitenRinex Correciones Diferenciales Postproceso Pdop DopIvan AmayaNoch keine Bewertungen
- Informe de Inspeccion A CampoDokument10 SeitenInforme de Inspeccion A CampoMiguel A. MuñozNoch keine Bewertungen
- Red de triangulación topográficaDokument3 SeitenRed de triangulación topográficaAndrés Llanos SánchezNoch keine Bewertungen
- Fotogrametría y cartografía: geodesia, elipsoides y sistemas de coordenadasDokument91 SeitenFotogrametría y cartografía: geodesia, elipsoides y sistemas de coordenadasjhulinobNoch keine Bewertungen
- Cálculo y compensación de redes GNSS con Leica InfinityDokument30 SeitenCálculo y compensación de redes GNSS con Leica InfinityIng. CaOs100% (1)
- Cotizacion Alquiler 19-CA130 COSAPI (R10 - R8)Dokument3 SeitenCotizacion Alquiler 19-CA130 COSAPI (R10 - R8)alberto montesNoch keine Bewertungen
- GINFO I 006 LEVANTAMIENTOS TOPOGRÁFICOS Versión 3 - 1Dokument20 SeitenGINFO I 006 LEVANTAMIENTOS TOPOGRÁFICOS Versión 3 - 1bradleyNoch keine Bewertungen
- Diseño de Un Sistema de SemaforizacionDokument7 SeitenDiseño de Un Sistema de SemaforizacionChristian Roman100% (1)
- Datos Generales para Certificacion 01. P PDFDokument21 SeitenDatos Generales para Certificacion 01. P PDFMauricio Zapata QuintanaNoch keine Bewertungen
- Resolucion 2008 1207 PlanosDokument7 SeitenResolucion 2008 1207 PlanosDanner Fabian Hernandez SantosNoch keine Bewertungen
- Tabla Levantamiento Por Radiacion DobleDokument1 SeiteTabla Levantamiento Por Radiacion DobleDanny Buitrago100% (1)
- Descripción Aplicación GEOCOL2004Dokument3 SeitenDescripción Aplicación GEOCOL2004Stevenso PicoNoch keine Bewertungen
- Método Paramétrico de AjusteDokument17 SeitenMétodo Paramétrico de AjusteBryan MoralesNoch keine Bewertungen
- Cálculo y Compensación de PoligonalesDokument4 SeitenCálculo y Compensación de PoligonalesChak Arroyo SolanoNoch keine Bewertungen
- Manual Pentax R300X - EstaciónDokument79 SeitenManual Pentax R300X - EstaciónJorge Carlos AlmandozNoch keine Bewertungen
- Agisoft PhotoScan informe procesamiento 1268 imágenesDokument7 SeitenAgisoft PhotoScan informe procesamiento 1268 imágenessebastian tejadaNoch keine Bewertungen
- Trabajo de investigación final sobre actividades geodésicas de gabinete para proyecto vialDokument15 SeitenTrabajo de investigación final sobre actividades geodésicas de gabinete para proyecto vialCristian VeizagaNoch keine Bewertungen
- Transformacion de CoordenadasDokument15 SeitenTransformacion de CoordenadasLokithoo X Thii FlorzNoch keine Bewertungen
- Certificado Catastral - 100018029389276Dokument2 SeitenCertificado Catastral - 100018029389276David ErazoNoch keine Bewertungen
- Puntos GNSS materializados en la Ruta del SolDokument2 SeitenPuntos GNSS materializados en la Ruta del SolJuan AlvarezNoch keine Bewertungen
- Informe Levantamiento TOPOGRAFICO ComisionDokument16 SeitenInforme Levantamiento TOPOGRAFICO ComisionCESAR ROVIRA100% (1)
- Clase 9 Al 12 - Planimetría y AltimetríaDokument21 SeitenClase 9 Al 12 - Planimetría y AltimetríaContigo HuayllahuaraNoch keine Bewertungen
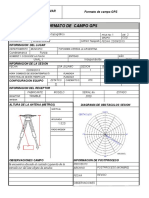
- FormatoCampoGPSLevantamientoTopograficoFunzaDokument1 SeiteFormatoCampoGPSLevantamientoTopograficoFunzaAndres Bolivar100% (1)
- MacroPerfiles V09Dokument4 SeitenMacroPerfiles V09Robert DeckerNoch keine Bewertungen
- Programa - para Calculadora Factor CombinadoDokument2 SeitenPrograma - para Calculadora Factor CombinadodjTOPONoch keine Bewertungen
- Poligonal Cerrada PLANTILLADokument8 SeitenPoligonal Cerrada PLANTILLAArturo Alfredo Farje AlvarezNoch keine Bewertungen
- Transformación de coordenadas geodésicasDokument7 SeitenTransformación de coordenadas geodésicasElard HuisaNoch keine Bewertungen
- Glosario de Topografia en La Ing CivilDokument15 SeitenGlosario de Topografia en La Ing Civilflip berto algoNoch keine Bewertungen
- Formato de Solicitud de Equipos Topografía GeodesiaDokument3 SeitenFormato de Solicitud de Equipos Topografía GeodesiaCristian TipantuñaNoch keine Bewertungen
- Conversion Datum Psad56 Wgs84Dokument26 SeitenConversion Datum Psad56 Wgs84Jose Coronado YnoñanNoch keine Bewertungen
- Ajuste de redes de nivelación y poligonal topográficaDokument2 SeitenAjuste de redes de nivelación y poligonal topográficaJHON ANDERSSON JURADO HINCAPIENoch keine Bewertungen
- Geodesia InformeDokument21 SeitenGeodesia InformeManuel Palomino Jorge0% (1)
- Libro de Teodolito Excel-2Dokument3 SeitenLibro de Teodolito Excel-2Jerson Valenzuela OchanteNoch keine Bewertungen
- Calculo Del Factor de EscalaDokument2 SeitenCalculo Del Factor de EscalaJuan Herradda Montagne100% (1)
- GEOEYEDokument30 SeitenGEOEYEcarlos perezNoch keine Bewertungen
- Informe Topográfico Georreferenciado Florencia CaquetáDokument9 SeitenInforme Topográfico Georreferenciado Florencia CaquetáAngelica RiveraNoch keine Bewertungen
- Informe Gps San MiguelDokument19 SeitenInforme Gps San MiguelPaola Andrea Diaz GonzalezNoch keine Bewertungen
- Laboratorio 1Dokument19 SeitenLaboratorio 1tania reynilda davila vilcaNoch keine Bewertungen
- GPS El VerjonDokument6 SeitenGPS El VerjonDiego NorreaNoch keine Bewertungen
- Métodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308Von EverandMétodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308Noch keine Bewertungen
- Ingenieria Mathcad Tutorial EjemplosDokument121 SeitenIngenieria Mathcad Tutorial EjemplosAnonymous Ek100RdbcH83% (6)
- Diseño de Elementos de Hormigón - Universidad Nacional de ColombiaDokument519 SeitenDiseño de Elementos de Hormigón - Universidad Nacional de Colombiaanepa201367% (3)
- Dinámica de suelos en ingeniería civilDokument220 SeitenDinámica de suelos en ingeniería civilnestcop2005Noch keine Bewertungen
- BULBO PRESION ISOBARA - Distribución de Esfuerzos en El Suelo Debido A CargasDokument21 SeitenBULBO PRESION ISOBARA - Distribución de Esfuerzos en El Suelo Debido A CargasWML1964100% (1)
- Sismologia PDFDokument13 SeitenSismologia PDFRPCOORNoch keine Bewertungen
- Diego Antonio Seisdedos JavierDokument150 SeitenDiego Antonio Seisdedos JavierDiego Rivera100% (1)
- Guia Boliviana de Diseno Sismico V3.0 2018 PDFDokument80 SeitenGuia Boliviana de Diseno Sismico V3.0 2018 PDFJonas Negretty100% (3)
- Norma E030 Diseño Sismorresistente PDFDokument59 SeitenNorma E030 Diseño Sismorresistente PDFDiego RiveraNoch keine Bewertungen
- Guia Boliviana de Diseno Sismico V3.0 2018 PDFDokument80 SeitenGuia Boliviana de Diseno Sismico V3.0 2018 PDFJonas Negretty100% (3)
- NB688 AlcSanDokument127 SeitenNB688 AlcSanLuis MUñoz Duarte100% (3)
- 7 Aparato ReproductorDokument37 Seiten7 Aparato ReproductorJose Damian Lemus IbacacheNoch keine Bewertungen
- Formulas TensionesDokument9 SeitenFormulas TensionesromquiroNoch keine Bewertungen
- HibelerDokument99 SeitenHibelerDiego RiveraNoch keine Bewertungen
- Primeros Auxilios 2008Dokument84 SeitenPrimeros Auxilios 2008ptxgfNoch keine Bewertungen
- Tema1 Tensiones PDFDokument22 SeitenTema1 Tensiones PDFJaime HerreraNoch keine Bewertungen
- Re An Imac IonDokument13 SeitenRe An Imac IonYessica Duque CorreaNoch keine Bewertungen
- Tema 5 PDFDokument9 SeitenTema 5 PDFvictor luisNoch keine Bewertungen
- Paro Cardiaco Definicion 20700 Ngzqz4Dokument1 SeiteParo Cardiaco Definicion 20700 Ngzqz4Diego RiveraNoch keine Bewertungen
- Manejo del shock hipovolémicoDokument40 SeitenManejo del shock hipovolémicoliderskullNoch keine Bewertungen
- Plano de Columnas PDFDokument1 SeitePlano de Columnas PDFDiego RiveraNoch keine Bewertungen
- Manejo del shock hipovolémicoDokument40 SeitenManejo del shock hipovolémicoliderskullNoch keine Bewertungen
- Calculo de Acero para Vigas y Columnas de Un Portico de 3 NivelesDokument62 SeitenCalculo de Acero para Vigas y Columnas de Un Portico de 3 Niveleshaditsche100% (6)
- Paro Cardiaco Definicion 20700 Ngzqz4Dokument1 SeiteParo Cardiaco Definicion 20700 Ngzqz4Diego RiveraNoch keine Bewertungen
- Capitulo3 - Diseño y Calculo de Zapatas PDFDokument13 SeitenCapitulo3 - Diseño y Calculo de Zapatas PDFKarin RodriguezNoch keine Bewertungen
- (H110-002-02) TextoDokument3 Seiten(H110-002-02) TextoDiego RiveraNoch keine Bewertungen
- RCP BásicoDokument135 SeitenRCP BásicoDiego RiveraNoch keine Bewertungen
- Explotacion de Aguas SubterraneasDokument227 SeitenExplotacion de Aguas SubterraneasVladi Arellano MartNoch keine Bewertungen
- Modelo de Declaración Jurada NotariadaDokument1 SeiteModelo de Declaración Jurada NotariadaDiego Rivera57% (7)
- Sistemas Opticos en Analisis QuimicosDokument6 SeitenSistemas Opticos en Analisis QuimicosLuis LiraNoch keine Bewertungen
- Informe Grupal DilataciónDokument6 SeitenInforme Grupal DilataciónevelynNoch keine Bewertungen
- Calderas A Bagazo - Tomo IDokument364 SeitenCalderas A Bagazo - Tomo Iingiemeduardo100% (1)
- π DEFINICIONDokument2 Seitenπ DEFINICIONAntonio Cafeel Martinez SevillaNoch keine Bewertungen
- Marco TeoricoDokument2 SeitenMarco TeoricoisaNoch keine Bewertungen
- Trabajo Práctico #1 Fisicoquimica (2º4 )Dokument6 SeitenTrabajo Práctico #1 Fisicoquimica (2º4 )Roxana AlbertiNoch keine Bewertungen
- 2.1.2 Sensores MecanicosDokument9 Seiten2.1.2 Sensores MecanicosLuis Manuel Huertas GarridoNoch keine Bewertungen
- Ggplot2 SpanishDokument2 SeitenGgplot2 SpanishAngeloIgnacioMuñozRivera0% (1)
- CR-HT - SikaTop Seal 107 PDFDokument2 SeitenCR-HT - SikaTop Seal 107 PDFjchavesz6Noch keine Bewertungen
- Modulo Metodos CuantitativosDokument86 SeitenModulo Metodos CuantitativosOsWaldo Perez0% (1)
- Laboratorio 8Dokument15 SeitenLaboratorio 8Alexander Díaz100% (2)
- Examen Final Matematicas 1Dokument11 SeitenExamen Final Matematicas 1Buffalo RodNoch keine Bewertungen
- Fenomenos TransitoriosDokument15 SeitenFenomenos Transitoriosdestelloazul50% (2)
- Revista de Operatoria Dental ActualizadoDokument6 SeitenRevista de Operatoria Dental ActualizadolinthiaNoch keine Bewertungen
- Eje - Metodo de Memoria InternaDokument10 SeitenEje - Metodo de Memoria InternaJesus Franco TorresNoch keine Bewertungen
- Megohmetro Modelos 1154 TMF y 1155 TMF-ManualDokument13 SeitenMegohmetro Modelos 1154 TMF y 1155 TMF-ManualdelboteNoch keine Bewertungen
- Tarea 2Dokument3 SeitenTarea 2Luiggi Caceres0% (2)
- Introducción a las vibraciones: tipos, causas y ecuaciones de movimientoDokument41 SeitenIntroducción a las vibraciones: tipos, causas y ecuaciones de movimientoEdwin AlexisNoch keine Bewertungen
- Capitulo 3 Tablero Electrico EjemploDokument11 SeitenCapitulo 3 Tablero Electrico EjemploAngelo Tito MNoch keine Bewertungen
- Repaso FinalDokument3 SeitenRepaso FinalArcelia HigaredaNoch keine Bewertungen
- F Moderna Acosta Cap 7-10Dokument45 SeitenF Moderna Acosta Cap 7-10Jim VazquezNoch keine Bewertungen
- Ejercicios de Porcentaje en Peso y Porcentaje en VolumenDokument2 SeitenEjercicios de Porcentaje en Peso y Porcentaje en VolumenAlfonso FloresNoch keine Bewertungen
- Metodos Geofisicos de ExploraciónDokument8 SeitenMetodos Geofisicos de ExploraciónMikhail LópezNoch keine Bewertungen
- Selección de materiales para ingeniería: Diagrama Fe-Fe3CDokument5 SeitenSelección de materiales para ingeniería: Diagrama Fe-Fe3CBrandon ArceNoch keine Bewertungen
- Guia ComplejosDokument3 SeitenGuia ComplejosSeba MartinezNoch keine Bewertungen
- Calculo de Barras y SoportesDokument18 SeitenCalculo de Barras y SoportesMarcos100% (2)
- Equipos de Control y Proteccion Tanques y Accesorios PDFDokument69 SeitenEquipos de Control y Proteccion Tanques y Accesorios PDFJose Luis MuñozNoch keine Bewertungen
- Unidad 10 DISTRIBUCIÓN NORMAL PDFDokument10 SeitenUnidad 10 DISTRIBUCIÓN NORMAL PDFGerald CuzcanoNoch keine Bewertungen
- PlanetasDokument3 SeitenPlanetasJFernando TorresNoch keine Bewertungen
- Esfuerzos en Pernos (Modificado 02-04-04)Dokument14 SeitenEsfuerzos en Pernos (Modificado 02-04-04)Daniel TaborgaNoch keine Bewertungen