Das könnte Ihnen auch gefallen
- Feature Selection UNIT 4Dokument40 SeitenFeature Selection UNIT 4sujitha100% (2)
- Color Schemes for Fashion DesignDokument39 SeitenColor Schemes for Fashion DesignFahud KhanNoch keine Bewertungen
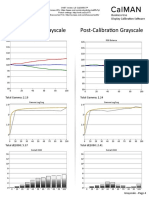
- LG OLED55C7P CNET Review Calibration ResultsDokument3 SeitenLG OLED55C7P CNET Review Calibration ResultsDavid KatzmaierNoch keine Bewertungen
- PDF ProcessorII - JSXDokument15 SeitenPDF ProcessorII - JSXSuparmanNoch keine Bewertungen
- Hough TransformDokument16 SeitenHough TransformFateeha Fatima TurkNoch keine Bewertungen
- CGChapter 3Dokument27 SeitenCGChapter 3Chandra DeepNoch keine Bewertungen
- Akash Mahanty 2Dokument9 SeitenAkash Mahanty 2Ee0UYDAIWa5wdZxHpYeI7mYET2p8o9Wkdj5CvpMNoch keine Bewertungen
- 5 Hough TransformDokument27 Seiten5 Hough TransformsujithaNoch keine Bewertungen
- Automatic Number Plate Recognition System: Hakob Sarukhanyan, Souren Alaverdyan, and Grigor PetrosyanDokument4 SeitenAutomatic Number Plate Recognition System: Hakob Sarukhanyan, Souren Alaverdyan, and Grigor PetrosyanVelagapudi RamakrishnaNoch keine Bewertungen
- Hough TransformDokument13 SeitenHough TransformAkilesh ArigelaNoch keine Bewertungen
- Lab Manual# 10Dokument8 SeitenLab Manual# 10Muhammad Hamza AminNoch keine Bewertungen
- Finding Basic Shapes: 6.1 Combining EdgesDokument18 SeitenFinding Basic Shapes: 6.1 Combining EdgesHàng Không Mẫu Hạm100% (1)
- Hough Transform: Presentation by Sumit TandonDokument27 SeitenHough Transform: Presentation by Sumit TandonpsnvaratharajanNoch keine Bewertungen
- E0005E - Industrial Image Analysis: The Hough Transform Matthew ThurleyDokument26 SeitenE0005E - Industrial Image Analysis: The Hough Transform Matthew ThurleyNorbey Marin MorenoNoch keine Bewertungen
- INF 4300 – Introduction to Hough TransformDokument20 SeitenINF 4300 – Introduction to Hough Transformr10aldinhoNoch keine Bewertungen
- Improved Approach For Mobile Robotics in Pattern Recognition 3DDokument8 SeitenImproved Approach For Mobile Robotics in Pattern Recognition 3DSelva GanapathyNoch keine Bewertungen
- Segmentation 04Dokument11 SeitenSegmentation 04KumarPatraNoch keine Bewertungen
- Assignment 2Dokument10 SeitenAssignment 2Baljeet KaurNoch keine Bewertungen
- Graphs, Linear Equations, and FunctionsDokument46 SeitenGraphs, Linear Equations, and FunctionsAmit BhararaNoch keine Bewertungen
- Module 3- 2D Transformations_1Dokument91 SeitenModule 3- 2D Transformations_1Rajeswari RNoch keine Bewertungen
- Lecture 14Dokument73 SeitenLecture 14Sourabh Sisodia SrßNoch keine Bewertungen
- Try To Graph and Name The Following EquationsDokument46 SeitenTry To Graph and Name The Following EquationsStephanie DecidaNoch keine Bewertungen
- Generalised Hough TransformDokument14 SeitenGeneralised Hough TransformMichelle HoltNoch keine Bewertungen
- Laboratory 4. Image Features and Transforms: 4.1 Hough Transform For Lines DetectionDokument13 SeitenLaboratory 4. Image Features and Transforms: 4.1 Hough Transform For Lines DetectionIulian NeagaNoch keine Bewertungen
- Vaninshing Point Detection PDFDokument0 SeitenVaninshing Point Detection PDFUkenderan ElanNoch keine Bewertungen
- Hough 09gr820Dokument7 SeitenHough 09gr820Luis Alberto HNoch keine Bewertungen
- Output Primitives (Contd)Dokument134 SeitenOutput Primitives (Contd)Sreshtha KashyapNoch keine Bewertungen
- Loading FrameDokument15 SeitenLoading FramejayanthikrishnanNoch keine Bewertungen
- E0005e Lecture05 Hough Transform - Dvi PDFDokument26 SeitenE0005e Lecture05 Hough Transform - Dvi PDFtweenturboNoch keine Bewertungen
- Ellipse OverlapsDokument11 SeitenEllipse Overlapsfiore.mirkoNoch keine Bewertungen
- Surface Modeling: An Area Bounded by an Identifiable PerimeterDokument27 SeitenSurface Modeling: An Area Bounded by an Identifiable PerimeterraghunathreddyNoch keine Bewertungen
- AlgorithmDokument22 SeitenAlgorithmASHIJ KRISHNAN SURESHNoch keine Bewertungen
- Digital Image Processing WorkshopDokument50 SeitenDigital Image Processing WorkshopAbhinav GuptaNoch keine Bewertungen
- Presentation On Line Drawing AlgorithmsDokument32 SeitenPresentation On Line Drawing AlgorithmsMusariri TalentNoch keine Bewertungen
- Clipping Window TransformationsDokument50 SeitenClipping Window TransformationsGold RogerNoch keine Bewertungen
- Rectangle Detection Using Hough TransformDokument8 SeitenRectangle Detection Using Hough TransformshyrazkhanNoch keine Bewertungen
- Hough Transform For Straight Lines: Mini-Project in Image Processing, 7th Semester 2007 by Jeppe Jensen. Group 721Dokument4 SeitenHough Transform For Straight Lines: Mini-Project in Image Processing, 7th Semester 2007 by Jeppe Jensen. Group 721salem31Noch keine Bewertungen
- 2005 SolveDokument16 Seiten2005 SolveAnirbaan SahaNoch keine Bewertungen
- Hough transform line curve detectionDokument10 SeitenHough transform line curve detectionMehak FatimaNoch keine Bewertungen
- Unit I Static Electric Fields: Electromagnetic FieldDokument31 SeitenUnit I Static Electric Fields: Electromagnetic FieldrajkumarsacNoch keine Bewertungen
- Optics 5 PDFDokument6 SeitenOptics 5 PDFz.umul9031Noch keine Bewertungen
- 1009 Generalized Hough 1 (Autosaved)Dokument28 Seiten1009 Generalized Hough 1 (Autosaved)Robe SolomonNoch keine Bewertungen
- Curves and Surface Computer GraphicsDokument70 SeitenCurves and Surface Computer GraphicsUrvashi Bhardwaj100% (1)
- lect21Dokument18 Seitenlect21Jaat Ravindra ChaudharyNoch keine Bewertungen
- AHRS LabDokument12 SeitenAHRS Labjoshimeet479Noch keine Bewertungen
- 3D Object Representation ModelingDokument46 Seiten3D Object Representation Modelingfelipecarvalho.bio8427Noch keine Bewertungen
- 2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisDokument40 Seiten2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisProgrammer KhNoch keine Bewertungen
- Geometric TransformationsDokument40 SeitenGeometric TransformationsidheivyaNoch keine Bewertungen
- 2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisDokument40 Seiten2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisAmudha SenthilNoch keine Bewertungen
- Lecture 05Dokument46 SeitenLecture 05zaidNoch keine Bewertungen
- Kinematic Position AnalysisDokument56 SeitenKinematic Position AnalysispgvijayanandNoch keine Bewertungen
- Unit 1 Filled Area PrimitivesDokument6 SeitenUnit 1 Filled Area PrimitivesPiyush KoiralaNoch keine Bewertungen
- Hough Transform: Brief DescriptionDokument14 SeitenHough Transform: Brief DescriptionAmjad SaeedNoch keine Bewertungen
- Paper HoughTransDokument19 SeitenPaper HoughTransLê Hải ĐăngNoch keine Bewertungen
- 20 Multiscale Vessel EnhancementDokument13 Seiten20 Multiscale Vessel EnhancementM Rameez Ur RehmanNoch keine Bewertungen
- 3D Transformations & Orientation Parameterization: Advanced Computer Animation Techniques Aug-Dec 2011 Cesteves@cimat - MXDokument33 Seiten3D Transformations & Orientation Parameterization: Advanced Computer Animation Techniques Aug-Dec 2011 Cesteves@cimat - MXArturo Dominguez Esquivel100% (1)
- Computer Graphics: Geometric Objects and TransformationsDokument71 SeitenComputer Graphics: Geometric Objects and TransformationsArulNoch keine Bewertungen
- Computer Personal Assignment Question MattyDokument2 SeitenComputer Personal Assignment Question MattyyemanerashefordNoch keine Bewertungen
- Line Drawing, Line Clipping, Polygon Cliping AlgorithmDokument10 SeitenLine Drawing, Line Clipping, Polygon Cliping AlgorithmBibin SinghNoch keine Bewertungen
- Cim 23.6Dokument81 SeitenCim 23.6RajeshKumarNoch keine Bewertungen
- 2 CGDokument8 Seiten2 CGSurendra Singh ChauhanNoch keine Bewertungen
- A-level Maths Revision: Cheeky Revision ShortcutsVon EverandA-level Maths Revision: Cheeky Revision ShortcutsBewertung: 3.5 von 5 Sternen3.5/5 (8)
- hw3 Sol PDFDokument5 Seitenhw3 Sol PDFSmitha VasNoch keine Bewertungen
- Ip LMDokument52 SeitenIp LMHussain BibiNoch keine Bewertungen
- Z TransformDokument71 SeitenZ TransformSmitha VasNoch keine Bewertungen
- Quick Start Guide: Ibm Smartcloud ProvisioningDokument2 SeitenQuick Start Guide: Ibm Smartcloud ProvisioningSmitha VasNoch keine Bewertungen
- Elg6163 FirDokument38 SeitenElg6163 FirAbdul RahimNoch keine Bewertungen
- InstallingDokument72 SeitenInstallingSmitha VasNoch keine Bewertungen
- Fourier Series ExplainedDokument80 SeitenFourier Series ExplainedSmitha VasNoch keine Bewertungen
- Discrete ConvolutionDokument51 SeitenDiscrete ConvolutionSmitha VasNoch keine Bewertungen
- 8-4basic Fir StructuresDokument8 Seiten8-4basic Fir StructuresSmitha VasNoch keine Bewertungen
- Properties of The Continuous-Time Fourier SeriesDokument6 SeitenProperties of The Continuous-Time Fourier SeriesSmitha VasNoch keine Bewertungen
- PointersDokument47 SeitenPointersJigg SawNoch keine Bewertungen
- Alumni QuestionaireDokument3 SeitenAlumni QuestionaireSmitha VasNoch keine Bewertungen
- 2009 Fifth International Joint Conference On INC, IMS and IDC 2009 Fifth International Joint Conference On INC, IMS and IDCDokument8 Seiten2009 Fifth International Joint Conference On INC, IMS and IDC 2009 Fifth International Joint Conference On INC, IMS and IDCSmitha VasNoch keine Bewertungen
- 6 Relational Schema DesignDokument52 Seiten6 Relational Schema DesignAditya RajasekaranNoch keine Bewertungen
- PRE SlidesDokument59 SeitenPRE SlidesSmitha VasNoch keine Bewertungen
- Partial Redundancy Elimination: Advanced Compilers M. LamDokument10 SeitenPartial Redundancy Elimination: Advanced Compilers M. LamSmitha VasNoch keine Bewertungen
- 19 Final Code GenerationDokument16 Seiten19 Final Code GenerationSmitha VasNoch keine Bewertungen
- Colorlossless Image CompressionDokument7 SeitenColorlossless Image CompressionSmitha VasNoch keine Bewertungen
- 120 Introducing BisonDokument10 Seiten120 Introducing BisonSmitha VasNoch keine Bewertungen
- DFA SampleDokument6 SeitenDFA SampleSmitha VasNoch keine Bewertungen
- 20 DB Formal DesignDokument13 Seiten20 DB Formal DesignSmitha VasNoch keine Bewertungen
- 9.1.0 Branch Prediction Pentiums IBM PPCDokument163 Seiten9.1.0 Branch Prediction Pentiums IBM PPCshahbunafNoch keine Bewertungen
- ARM Instruction Sets Explained for Memory Access, Arithmetic, Logic and BranchingDokument30 SeitenARM Instruction Sets Explained for Memory Access, Arithmetic, Logic and Branchingjayz09narayan100% (1)
- 19 Final Code GenerationDokument16 Seiten19 Final Code GenerationSmitha VasNoch keine Bewertungen
- Architecture of 80386Dokument39 SeitenArchitecture of 80386Satish KedarNoch keine Bewertungen
- Chapter 7 SlidesDokument23 SeitenChapter 7 SlidesSmitha VasNoch keine Bewertungen
- AES IntroDokument16 SeitenAES IntronachiappangNoch keine Bewertungen
- Color Quick Response CodeDokument5 SeitenColor Quick Response CodeSmitha VasNoch keine Bewertungen
- Color 2DDokument24 SeitenColor 2DSmitha VasNoch keine Bewertungen
- Shader SettingsDokument4 SeitenShader SettingsSean CrumpNoch keine Bewertungen
- Learn the basics of color theory with this color wheel guideDokument5 SeitenLearn the basics of color theory with this color wheel guidesusan_afms2904Noch keine Bewertungen
- Local image enhancement techniquesDokument12 SeitenLocal image enhancement techniquesYamini PraveenNoch keine Bewertungen
- 3D Modeling and Animation ToolsDokument7 Seiten3D Modeling and Animation ToolsIzzah NadiahNoch keine Bewertungen
- Gujarat Technological University: Type of Course: Core EngineeringDokument4 SeitenGujarat Technological University: Type of Course: Core EngineeringBrijesh B NaikNoch keine Bewertungen
- Assignment 1 Comp 425Dokument3 SeitenAssignment 1 Comp 425hich dNoch keine Bewertungen
- NUMBER PLATE RECOGNITION USING MATLABDokument10 SeitenNUMBER PLATE RECOGNITION USING MATLABKrishna BasutkarNoch keine Bewertungen
- Script For ICTDokument2 SeitenScript For ICTClarence MarianoNoch keine Bewertungen
- EE 610 - Notes 02Dokument2 SeitenEE 610 - Notes 02Atharv SavarkarNoch keine Bewertungen
- Bicubic Interpolation Wiki PDFDokument4 SeitenBicubic Interpolation Wiki PDFbraulio.dantasNoch keine Bewertungen
- CV Lab 3 Muhammad Umer SiddiqDokument7 SeitenCV Lab 3 Muhammad Umer Siddiqhik umNoch keine Bewertungen
- Module-2 HistogramDokument12 SeitenModule-2 HistogramG.AdithiyaNoch keine Bewertungen
- Question BankDokument15 SeitenQuestion Bankdump mailNoch keine Bewertungen
- Cafe Color Palette: Color 1 Color 2 Color 3 Color 4 Color 5Dokument4 SeitenCafe Color Palette: Color 1 Color 2 Color 3 Color 4 Color 5TwishaNoch keine Bewertungen
- Digital Image FundamentalsDokument50 SeitenDigital Image FundamentalsGetachew Yizengaw EnyewNoch keine Bewertungen
- Assignment No - 3Dokument2 SeitenAssignment No - 3Ali MesbahNoch keine Bewertungen
- Summed Area TablesDokument29 SeitenSummed Area TablesDhillonvNoch keine Bewertungen
- ANFIS and Prewitt Edge Detection for Rice Type IdentificationDokument8 SeitenANFIS and Prewitt Edge Detection for Rice Type IdentificationDean FitrahNoch keine Bewertungen
- EntitlementsDokument2 SeitenEntitlementssovann layNoch keine Bewertungen
- Evans, Kirczenow - Voxels in LBP2 (Siggraph 2011 Advances in Real-Time Rendering Course)Dokument90 SeitenEvans, Kirczenow - Voxels in LBP2 (Siggraph 2011 Advances in Real-Time Rendering Course)Rémy ObeinNoch keine Bewertungen
- Three Game Settings That Matter MostDokument6 SeitenThree Game Settings That Matter MostLance Alexander WeidemanNoch keine Bewertungen
- Color Models Explained with RGB, CMY, HSI (less than 40 chars: 38 charsDokument11 SeitenColor Models Explained with RGB, CMY, HSI (less than 40 chars: 38 charsSushant SawantNoch keine Bewertungen
- Direct Study New SyllabusDokument1 SeiteDirect Study New SyllabusDin EshNoch keine Bewertungen
- Chapter-4 - HTMLDokument30 SeitenChapter-4 - HTMLShahadat HossenNoch keine Bewertungen
- CS-419: Applied Image Processing: Dr. Muhammad HanifDokument69 SeitenCS-419: Applied Image Processing: Dr. Muhammad HanifSarim JawadNoch keine Bewertungen
- DIP Lab Manual FinalDokument31 SeitenDIP Lab Manual Finalsamay guptaNoch keine Bewertungen
- ST Assignment 2Dokument1 SeiteST Assignment 2wisic66104Noch keine Bewertungen