Das könnte Ihnen auch gefallen
- 02 PreCalc TG PDFDokument276 Seiten02 PreCalc TG PDFElisa Dela Reyna BaladadNoch keine Bewertungen
- Introduction To The Guest SpeakerDokument2 SeitenIntroduction To The Guest SpeakerLeodigaria Reyno94% (70)
- Golden RatioDokument21 SeitenGolden RatioSalvator2000Noch keine Bewertungen
- Chapter 6 Review Questions Math 30-1 Trigonometric FunctionsDokument14 SeitenChapter 6 Review Questions Math 30-1 Trigonometric FunctionsMath 30-1 EDGE Study Guide Workbook - by RTD LearningNoch keine Bewertungen
- Circle Theorems Worksheet MWDokument6 SeitenCircle Theorems Worksheet MWColdblood 3000Noch keine Bewertungen
- Pipe Concrete Column Design Based On ACI 318-14: Input Data & Design SummaryDokument1 SeitePipe Concrete Column Design Based On ACI 318-14: Input Data & Design Summaryjackcan501Noch keine Bewertungen
- JMC14Dokument4 SeitenJMC14Ante MihaljevićNoch keine Bewertungen
- Properties of Special ParallelogramsDokument23 SeitenProperties of Special ParallelogramsRhealyn BaleNoch keine Bewertungen
- Adobe Scan 19 Dec 2023Dokument9 SeitenAdobe Scan 19 Dec 2023Kirush MitaNoch keine Bewertungen
- Geometry. Level 8. Circles. Angles in Circles (A)Dokument1 SeiteGeometry. Level 8. Circles. Angles in Circles (A)ROSLINA BINTI ABDUL RASHID MoeNoch keine Bewertungen
- Agn 2019Dokument4 SeitenAgn 2019lidiNoch keine Bewertungen
- 4bar MechanismDokument3 Seiten4bar MechanismStar GlacierNoch keine Bewertungen
- 1-Characteristics and Performances DefinitionDokument6 Seiten1-Characteristics and Performances DefinitionDN CoverNoch keine Bewertungen
- Lec#9 - CH15 - Kinematics of RB - Part2Dokument24 SeitenLec#9 - CH15 - Kinematics of RB - Part2Habeba MahmoudNoch keine Bewertungen
- Cambridge IGCSEDokument20 SeitenCambridge IGCSEBenson MwakwendaNoch keine Bewertungen
- 0607:43:M:J:2023Dokument20 Seiten0607:43:M:J:2023goodafternoonsomeoneNoch keine Bewertungen
- Strain Gauge Bridge PDFDokument4 SeitenStrain Gauge Bridge PDFmgrubisicNoch keine Bewertungen
- MOT 2 JEE 2021 Solutions PDFDokument16 SeitenMOT 2 JEE 2021 Solutions PDFBiswadeep GiriNoch keine Bewertungen
- 0653 w02 Er PDFDokument13 Seiten0653 w02 Er PDFKausaraliabbasiNoch keine Bewertungen
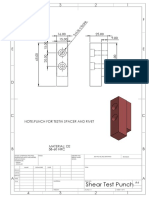
- Shear Test PunchDokument1 SeiteShear Test PunchMohammad GhousuddinNoch keine Bewertungen
- Sandwich Plates Nominal Size 16: Porting Pattern To DIN 24 340 Form A ISO 4401and CETOP-RP 121 HDokument26 SeitenSandwich Plates Nominal Size 16: Porting Pattern To DIN 24 340 Form A ISO 4401and CETOP-RP 121 HAshaNoch keine Bewertungen
- AME 352 Online, HW-2 2-1 For This Six-Bar Mechanism We Have Defined Several Vectors That Can Be Used in Formulating The KinematicDokument2 SeitenAME 352 Online, HW-2 2-1 For This Six-Bar Mechanism We Have Defined Several Vectors That Can Be Used in Formulating The Kinematicqurriyatus zahroNoch keine Bewertungen
- D A B C: StatementDokument9 SeitenD A B C: StatementDio ChanNoch keine Bewertungen
- CurrentElectricity Basichomeworksheet-3Dokument3 SeitenCurrentElectricity Basichomeworksheet-3Shreyansh ChauhanNoch keine Bewertungen
- RC Phase Shift OscillatorDokument25 SeitenRC Phase Shift Oscillatorahmed omarNoch keine Bewertungen
- Mecanismos ProblemaDokument2 SeitenMecanismos ProblemaManuel ChavezNoch keine Bewertungen
- BengkelDokument10 SeitenBengkelIko MacaNoch keine Bewertungen
- Chopper BladeDokument1 SeiteChopper BladeHENOK MULUGETANoch keine Bewertungen
- Statement:: PROBLEM 6-29Dokument4 SeitenStatement:: PROBLEM 6-29AmalinaNoch keine Bewertungen
- ECE 3144 Lecture 8: Dr. Rose Q. Hu Electrical and Computer Engineering Department Mississippi State UniversityDokument10 SeitenECE 3144 Lecture 8: Dr. Rose Q. Hu Electrical and Computer Engineering Department Mississippi State UniversityGopakumar G NairNoch keine Bewertungen
- Cambridge IGCSEDokument20 SeitenCambridge IGCSETanvi JaiswalNoch keine Bewertungen
- To Switch ON Compensating Network: Input OutputDokument2 SeitenTo Switch ON Compensating Network: Input OutputPiara SinghNoch keine Bewertungen
- Senal - Sensor - Acon. Senal - Sensor - Acon. Salidas - Da Salida - Control VB Senal - Error Salidas - Da Senal - Error Salida - ControlDokument7 SeitenSenal - Sensor - Acon. Senal - Sensor - Acon. Salidas - Da Salida - Control VB Senal - Error Salidas - Da Senal - Error Salida - ControlSergio OsorioNoch keine Bewertungen
- Combined Science ........................................................................................................ 2Dokument14 SeitenCombined Science ........................................................................................................ 2Chong Xue ErNoch keine Bewertungen
- SOLIDWORKS Educational Product. For Instructional Use OnlyDokument1 SeiteSOLIDWORKS Educational Product. For Instructional Use Onlyr.magalatiyNoch keine Bewertungen
- Solved Problems (1) Draw The Cam Profile For Following ConditionsDokument6 SeitenSolved Problems (1) Draw The Cam Profile For Following Conditionsrakesh kumarNoch keine Bewertungen
- Lec#10 - CH15 - Kinematics of RB - Part3Dokument11 SeitenLec#10 - CH15 - Kinematics of RB - Part3Habeba MahmoudNoch keine Bewertungen
- Cambridge IGCSEDokument20 SeitenCambridge IGCSETanvi JaiswalNoch keine Bewertungen
- Worked Example: Checking A Steel Beam in Simple BendingDokument10 SeitenWorked Example: Checking A Steel Beam in Simple BendingArianna EstructurasNoch keine Bewertungen
- Selecting JFET Bias Resistors For A Schoeps Type Microphone Circuit (Scope Method)Dokument1 SeiteSelecting JFET Bias Resistors For A Schoeps Type Microphone Circuit (Scope Method)Victor PastorNoch keine Bewertungen
- Hfe Magnat Ma 800 SchematicsDokument11 SeitenHfe Magnat Ma 800 SchematicsGlenn DharminNoch keine Bewertungen
- Accounting .................................................................................................................... 2Dokument12 SeitenAccounting .................................................................................................................... 2cheah_chinNoch keine Bewertungen
- ISO - RH Helical Gear 1.125M 40Dokument1 SeiteISO - RH Helical Gear 1.125M 40Milan StanisljevicNoch keine Bewertungen
- Sample 1Dokument15 SeitenSample 1Pravin PandeyNoch keine Bewertungen
- L-Section: Values For CalculationDokument3 SeitenL-Section: Values For CalculationEng-CalculationsNoch keine Bewertungen
- Solutions To JEE Main - 2 - JEE - 2023: Section-1 PhysicsDokument12 SeitenSolutions To JEE Main - 2 - JEE - 2023: Section-1 PhysicsAlt accountNoch keine Bewertungen
- Good Hope School 11-16-1B Ch.9 Congruence Similarity CQDokument3 SeitenGood Hope School 11-16-1B Ch.9 Congruence Similarity CQchristielam123Noch keine Bewertungen
- Calculation Chart & Formula For SHapesDokument1 SeiteCalculation Chart & Formula For SHapessantoshcipetNoch keine Bewertungen
- Numerical 2222Dokument15 SeitenNumerical 2222Rodalyn AlquisolaNoch keine Bewertungen
- PDF Created With Fineprint Pdffactory Pro Trial VersionDokument1 SeitePDF Created With Fineprint Pdffactory Pro Trial VersionJusetf ArteagaNoch keine Bewertungen
- PDF Created With Fineprint Pdffactory Pro Trial VersionDokument1 SeitePDF Created With Fineprint Pdffactory Pro Trial VersionAndyNoch keine Bewertungen
- Foreword: Are Primarily For The Information of The Subject Teachers ConcernedDokument13 SeitenForeword: Are Primarily For The Information of The Subject Teachers Concernedcheah_chinNoch keine Bewertungen
- CHPT 9 UzaysalDokument22 SeitenCHPT 9 UzaysalNASREE HAYEESAMA-AENoch keine Bewertungen
- Trig BookletDokument50 SeitenTrig BookletSera KimNoch keine Bewertungen
- Coordinate Cube PDFDokument1 SeiteCoordinate Cube PDFThanh NguyenNoch keine Bewertungen
- Statics JeffDokument60 SeitenStatics JeffssjeyadNoch keine Bewertungen
- MARK SCHEME For The November 2005 Question PaperDokument2 SeitenMARK SCHEME For The November 2005 Question PaperbelleNoch keine Bewertungen
- CVSB 371Dokument8 SeitenCVSB 371Long NguyễnNoch keine Bewertungen
- F5 MT Module 1Dokument4 SeitenF5 MT Module 1LAU JIA JIANoch keine Bewertungen
- Riz62984 - ch02 - 022-080 55Dokument1 SeiteRiz62984 - ch02 - 022-080 55vvddss6Noch keine Bewertungen
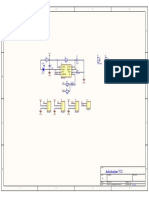
- R1 200K R2 1K C1 0.1uf C2 P1 P2: Audioanalyzer V2.0Dokument1 SeiteR1 200K R2 1K C1 0.1uf C2 P1 P2: Audioanalyzer V2.0joxNoch keine Bewertungen
- Combined Science: Paper 5129/01 Multiple ChoiceDokument9 SeitenCombined Science: Paper 5129/01 Multiple ChoiceequakeroatsNoch keine Bewertungen
- Screw Auto Machine Layout Electric Box 1 Do Viet Thang Booster VNDokument9 SeitenScrew Auto Machine Layout Electric Box 1 Do Viet Thang Booster VNNhât Pham DuyNoch keine Bewertungen
- 3 Phase Transformer ConnectionsDokument7 Seiten3 Phase Transformer ConnectionsRishi Kant SharmaNoch keine Bewertungen
- DesignSystem3 Ent385 PDFDokument3 SeitenDesignSystem3 Ent385 PDFAmalinaNoch keine Bewertungen
- TutorialDokument29 SeitenTutorialAmalinaNoch keine Bewertungen
- Lecture 3 Graphical Linkage SynthesisDokument53 SeitenLecture 3 Graphical Linkage SynthesisAmalinaNoch keine Bewertungen
- Chapter 9 Gear TrainsDokument99 SeitenChapter 9 Gear TrainsAmalina100% (1)
- Statement:: PROBLEM 6-29Dokument4 SeitenStatement:: PROBLEM 6-29AmalinaNoch keine Bewertungen
- Problems of The Week: VisualDokument27 SeitenProblems of The Week: VisualRajiv KabadNoch keine Bewertungen
- Hobsonajjustthemaths20021296smcetp PDFDokument1.296 SeitenHobsonajjustthemaths20021296smcetp PDFAIvan DCam G0% (1)
- Admin Guide Private Candidates: Oxford Cambridge and RSADokument16 SeitenAdmin Guide Private Candidates: Oxford Cambridge and RSAlerosenoirNoch keine Bewertungen
- Work Sheet 4Dokument16 SeitenWork Sheet 4Awais MehmoodNoch keine Bewertungen
- Math Enhancement 7 2ND Quarter ExamDokument3 SeitenMath Enhancement 7 2ND Quarter ExamAwesome BoyNoch keine Bewertungen
- Further Mathematics: Trial Exam 2012Dokument45 SeitenFurther Mathematics: Trial Exam 2012GabrielBarnettNoch keine Bewertungen
- Class-10 - Major Test-01 - Paper & SolutionDokument11 SeitenClass-10 - Major Test-01 - Paper & SolutionRakshit KeswaniNoch keine Bewertungen
- Ntse Mat AssignmentDokument8 SeitenNtse Mat AssignmentSanjeevkumarSinghNoch keine Bewertungen
- Naawan District SchoolsDokument1 SeiteNaawan District SchoolsChe Rochelle Nogard ChavezNoch keine Bewertungen
- The Learner's Development and Environment: Learning Episode 3Dokument9 SeitenThe Learner's Development and Environment: Learning Episode 3Jovinson LozanoNoch keine Bewertungen
- Narrative Report On Wawa Es Staff MeetingDokument2 SeitenNarrative Report On Wawa Es Staff MeetingJocelle FallarcunaNoch keine Bewertungen
- MA211 Assignment 1 Cover PageDokument11 SeitenMA211 Assignment 1 Cover PageNikasha DeviNoch keine Bewertungen
- Newsletter 09 January 2014Dokument2 SeitenNewsletter 09 January 2014telemark1Noch keine Bewertungen
- WRM Y7 Summer b5 Primes Proofs Eob Assessment A PDFDokument2 SeitenWRM Y7 Summer b5 Primes Proofs Eob Assessment A PDFĐặng Minh TuấnNoch keine Bewertungen
- 89 MA515 NotesDokument42 Seiten89 MA515 NotesAtul VermaNoch keine Bewertungen
- 13 4Dokument100 Seiten13 4ksr131Noch keine Bewertungen
- SequencesDokument13 SeitenSequencesSai Swetha KVNoch keine Bewertungen
- 1st Year Math 1st Test SeriesDokument16 Seiten1st Year Math 1st Test SeriesSindhu JattNoch keine Bewertungen
- New Microsoft Word DocumentDokument9 SeitenNew Microsoft Word Documentskveni28Noch keine Bewertungen
- 2019 YIJC Paper 1 Suggested SolutionsDokument14 Seiten2019 YIJC Paper 1 Suggested SolutionsGeorge ChooNoch keine Bewertungen
- Del Gallego, Maria Angela @iia-BspDokument2 SeitenDel Gallego, Maria Angela @iia-BspMaria Angela Del GallegoNoch keine Bewertungen
- AP Exam Review Calc BC Sem2Dokument13 SeitenAP Exam Review Calc BC Sem2Mark KimNoch keine Bewertungen
- Formulas Integrales HandbookDokument27 SeitenFormulas Integrales HandbookCarlosCHNoch keine Bewertungen
- Eew ps4Dokument6 SeitenEew ps4stfirstfir stlastlaNoch keine Bewertungen