Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Blended-Learning-Plan-Form (Mathematics 7)Dokument2 SeitenBlended-Learning-Plan-Form (Mathematics 7)KarlzNoch keine Bewertungen
- Phet Alpha DecayDokument2 SeitenPhet Alpha DecayAndika Sanjaya100% (1)
- I Wayan Agus Wirya Pratama - UjianWordDokument23 SeitenI Wayan Agus Wirya Pratama - UjianWordUmiKulsumNoch keine Bewertungen
- QWE Case StudyDokument5 SeitenQWE Case StudyShubhendra vatsaNoch keine Bewertungen
- Example: Triangle On A Face IconDokument26 SeitenExample: Triangle On A Face IconGinalyn QuimsonNoch keine Bewertungen
- Math 10 Week 2Dokument10 SeitenMath 10 Week 2Myla MillapreNoch keine Bewertungen
- Benchmark Systems For Digital Computer Simulation of A Static Transfer SwitchDokument8 SeitenBenchmark Systems For Digital Computer Simulation of A Static Transfer SwitchArturo Isidro Conde PérezNoch keine Bewertungen
- EnergyPendulum Gizmo 2Dokument6 SeitenEnergyPendulum Gizmo 2Delia SmithNoch keine Bewertungen
- GATE 2020 Online Test Series:: Civil EngineeringDokument6 SeitenGATE 2020 Online Test Series:: Civil EngineeringAvinash JhaNoch keine Bewertungen
- Research Process, Phases and 10 Step ModelDokument5 SeitenResearch Process, Phases and 10 Step ModelJ.B ChoNoch keine Bewertungen
- Lesson Plan - Maths - Create Graphs Based On Data CollectedDokument2 SeitenLesson Plan - Maths - Create Graphs Based On Data Collectedapi-464562811Noch keine Bewertungen
- Deterministic Phase Retrieval: A Green's Function SolutionDokument8 SeitenDeterministic Phase Retrieval: A Green's Function Solutionlednakashim100% (1)
- Pattern in Nature and The Regularities in The WorldDokument11 SeitenPattern in Nature and The Regularities in The Worldjake simNoch keine Bewertungen
- Tut-sheet-2-PHL120-13 With Final Answers PDFDokument2 SeitenTut-sheet-2-PHL120-13 With Final Answers PDFjgrgpt33Noch keine Bewertungen
- Introduction To Vectors in C++ Word PDFDokument3 SeitenIntroduction To Vectors in C++ Word PDFKarima BabaNoch keine Bewertungen
- Chapter 11Dokument12 SeitenChapter 11JeromeNoch keine Bewertungen
- 3 - ANN Part One PDFDokument30 Seiten3 - ANN Part One PDFIsmael EspinozaNoch keine Bewertungen
- Prototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorDokument6 SeitenPrototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorJournal of ComputingNoch keine Bewertungen
- Numerical Simulations of A Scramjet Isolator Using RANS and LES ApproachesDokument9 SeitenNumerical Simulations of A Scramjet Isolator Using RANS and LES ApproachesHoàng DavidNoch keine Bewertungen
- 9 - 28 - 0 - 0 - 40 - 5th Electrical DE&MPDokument165 Seiten9 - 28 - 0 - 0 - 40 - 5th Electrical DE&MPvijay kumar GuptaNoch keine Bewertungen
- Math PDFDokument95 SeitenMath PDFAnonymous kI39sJC1MNoch keine Bewertungen
- MathsDokument16 SeitenMathsAmith LakshmanNoch keine Bewertungen
- Introduction To Fluid Mechanics - TocDokument3 SeitenIntroduction To Fluid Mechanics - TocNguyễn Hồng Quân100% (2)
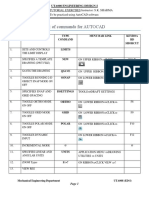
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDokument15 SeitenList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelNoch keine Bewertungen
- Measure of Dispersion Kurtosi, SkiwnessDokument22 SeitenMeasure of Dispersion Kurtosi, SkiwnessJOHN TUMWEBAZENoch keine Bewertungen
- An Improved Method For Grinding Mill Filling Measurement and TheDokument9 SeitenAn Improved Method For Grinding Mill Filling Measurement and Thehasan70 sheykhiNoch keine Bewertungen
- Chapter 3 (Laplace Transform)Dokument14 SeitenChapter 3 (Laplace Transform)EmmanuelNoch keine Bewertungen
- Maths Y8 4Dokument2 SeitenMaths Y8 4s100% (1)
- A New Versatile Electronic Speckle Pattern Interferometer For VibDokument318 SeitenA New Versatile Electronic Speckle Pattern Interferometer For Vibssunil7432Noch keine Bewertungen
- Anova 1Dokument11 SeitenAnova 1vijay2101Noch keine Bewertungen