Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- TM 1-1520-256-23 PDFDokument522 SeitenTM 1-1520-256-23 PDFEagle1968100% (1)
- Schedule of Loads PDFDokument5 SeitenSchedule of Loads PDFmae_morano81% (27)
- Steady Flow in Pipes: BTB 323/ Cse 352 Hydraulics Edwin K. Kanda, PHDDokument19 SeitenSteady Flow in Pipes: BTB 323/ Cse 352 Hydraulics Edwin K. Kanda, PHDErick WanduNoch keine Bewertungen
- LNGC BW Everett - IMO 9243148 - Cargo Operating ManualDokument223 SeitenLNGC BW Everett - IMO 9243148 - Cargo Operating Manualseawolf50Noch keine Bewertungen
- ABB Inverter ACS 150Dokument130 SeitenABB Inverter ACS 150Joe Electricneutron100% (1)
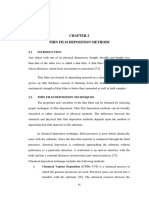
- Thin Film Deposition MethodsDokument14 SeitenThin Film Deposition MethodsoktavNoch keine Bewertungen
- 4-LET - General Education - SCIENCE 82-109Dokument28 Seiten4-LET - General Education - SCIENCE 82-109Rogen Hemodo67% (6)
- Vocational Training Report, Indian Oil Corporation Limited, Gujarat RefineryDokument43 SeitenVocational Training Report, Indian Oil Corporation Limited, Gujarat Refineryjhashashank26883% (12)
- Guia SupacDokument44 SeitenGuia SupacMario Vazquez BNoch keine Bewertungen
- Hydrocracking Unit PDFDokument9 SeitenHydrocracking Unit PDFcrili69Noch keine Bewertungen
- Kush Nir 2019Dokument6 SeitenKush Nir 2019Gustavo FloresNoch keine Bewertungen
- SDT Series User Manual (With Tigo)Dokument15 SeitenSDT Series User Manual (With Tigo)Manimaran MaranNoch keine Bewertungen
- G7Dokument21 SeitenG7Maame Ama FrempongNoch keine Bewertungen
- Scicent SQ U8 1-2 SetB Final eDokument7 SeitenScicent SQ U8 1-2 SetB Final eApple LouNoch keine Bewertungen
- of Gatorade..Dokument29 Seitenof Gatorade..Jay ThakkarNoch keine Bewertungen
- Magnum OpusDokument4 SeitenMagnum OpusPharaohgodking100% (1)
- Evolution Spas Manual ENG-19 PDFDokument44 SeitenEvolution Spas Manual ENG-19 PDFAnonymous 0aFzcZ100% (1)
- Single Plane Balance 091401Dokument16 SeitenSingle Plane Balance 091401ridzim4638Noch keine Bewertungen
- Carbon Aerogels For Electrochemical Applications - Journal of Non Crystalline Solids - Pekala - 1998Dokument7 SeitenCarbon Aerogels For Electrochemical Applications - Journal of Non Crystalline Solids - Pekala - 1998Fadhlullah RamadhaniNoch keine Bewertungen
- Property Measurement-Pvt: Abstract - The Experiment Was Carried Out ToDokument6 SeitenProperty Measurement-Pvt: Abstract - The Experiment Was Carried Out ToAYALEYDENNoch keine Bewertungen
- Overview of Fluid Catalytic Cracking Unit (FCC, Fccu) : Catalyst AluminumDokument4 SeitenOverview of Fluid Catalytic Cracking Unit (FCC, Fccu) : Catalyst AluminumAdemola RabiuNoch keine Bewertungen
- Data Sheet of Pressure Safety Valve: GeneralDokument1 SeiteData Sheet of Pressure Safety Valve: Generalenghemo89Noch keine Bewertungen
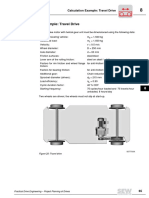
- Travel Drive ExampleDokument10 SeitenTravel Drive Examplep-nicoNoch keine Bewertungen
- PUPID May 2023 LoggerDokument43 SeitenPUPID May 2023 LoggerAlberto FernandezNoch keine Bewertungen
- Bombas Centrifugas 60HzDokument329 SeitenBombas Centrifugas 60Hzluiscampos77Noch keine Bewertungen
- Properties of Fluids NotesDokument14 SeitenProperties of Fluids NotesMavineNoch keine Bewertungen
- Assignment#1Dokument5 SeitenAssignment#1Hennesey LouriceNoch keine Bewertungen
- Electrical Field Test Procedures TPD2006 v6 PDFDokument38 SeitenElectrical Field Test Procedures TPD2006 v6 PDFbaljeetjatNoch keine Bewertungen
- Detection of Power Grid Synchronization Failure On Sensing Frequency and Voltage Beyond Acceptable RangeDokument6 SeitenDetection of Power Grid Synchronization Failure On Sensing Frequency and Voltage Beyond Acceptable RangeHari PrasadNoch keine Bewertungen
- Datasheet Differential Pressure Sensor SDP1108 SDP2108Dokument7 SeitenDatasheet Differential Pressure Sensor SDP1108 SDP2108jaijadduNoch keine Bewertungen