Das könnte Ihnen auch gefallen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsVon EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsBewertung: 3 von 5 Sternen3/5 (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Cummins Installation, Operations & Maintenance Manual PDFDokument74 SeitenCummins Installation, Operations & Maintenance Manual PDFMatthew Butler71% (17)
- Job Application Letter TemplateDokument2 SeitenJob Application Letter TemplateFuh Vallery100% (1)
- Burglar Alarm ProjectDokument4 SeitenBurglar Alarm ProjectAvik PathakNoch keine Bewertungen
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionNoch keine Bewertungen
- Project Report Speed Control of Induction MotorDokument47 SeitenProject Report Speed Control of Induction Motorsrajaprojects0% (1)
- Job Motivation TemplateDokument1 SeiteJob Motivation TemplateKevin Simbolon50% (2)
- Mechanical Design of Shell and Tube Type PDFDokument4 SeitenMechanical Design of Shell and Tube Type PDFSuryaprakashNoch keine Bewertungen
- Analog Circuit Design Volume Three: Design Note CollectionVon EverandAnalog Circuit Design Volume Three: Design Note CollectionBewertung: 3 von 5 Sternen3/5 (2)
- Project Report Speed Control of Induction MotorDokument47 SeitenProject Report Speed Control of Induction MotorSanjivee SachinNoch keine Bewertungen
- Laboratory E-Sources - Second Year B - Tech IV SEM (ECE)Dokument142 SeitenLaboratory E-Sources - Second Year B - Tech IV SEM (ECE)Chen-Wei LiangNoch keine Bewertungen
- Lecture Notes in Airport Engineering PDFDokument91 SeitenLecture Notes in Airport Engineering PDFMaya RajNoch keine Bewertungen
- Barcelona Traction Case DigestDokument3 SeitenBarcelona Traction Case DigestCheCheNoch keine Bewertungen
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionBewertung: 5 von 5 Sternen5/5 (1)
- Automatic Voltage Stabilizer - Syed Tahmid MahbubDokument21 SeitenAutomatic Voltage Stabilizer - Syed Tahmid Mahbubjewel768100% (2)
- Q.850 ISDN Cause CodesDokument12 SeitenQ.850 ISDN Cause CodesJack CastineNoch keine Bewertungen
- Interview Tips 1Dokument19 SeitenInterview Tips 1mdsd57% (7)
- SVAR Power FactorDokument5 SeitenSVAR Power FactorRyan HarrisNoch keine Bewertungen
- PWM-QR Ic: Control IC For Switched-Mode Power Supplies Using MOS-TransistorsDokument24 SeitenPWM-QR Ic: Control IC For Switched-Mode Power Supplies Using MOS-TransistorsCarlos ArturoNoch keine Bewertungen
- Automatyczna Ładowarka Akumulatorów Ołowiowych: Kity AVTDokument8 SeitenAutomatyczna Ładowarka Akumulatorów Ołowiowych: Kity AVTadyhansoloNoch keine Bewertungen
- Ultra-Fast Acting Electronic Circuit BreakerDokument55 SeitenUltra-Fast Acting Electronic Circuit Breakerpandi60% (5)
- T.D.A 4605-3Dokument20 SeitenT.D.A 4605-3Jose M PeresNoch keine Bewertungen
- Tda 4605Dokument21 SeitenTda 4605Salim SaeidyNoch keine Bewertungen
- Control Ics For Switched-Mode Power Supplies Tda 4601: Bipolar IcDokument26 SeitenControl Ics For Switched-Mode Power Supplies Tda 4601: Bipolar Icbeta2009Noch keine Bewertungen
- 555 Timer Guide: Features, Pinouts & ApplicationsDokument3 Seiten555 Timer Guide: Features, Pinouts & ApplicationschandrakanthNoch keine Bewertungen
- Speed Control of Single Phase Induction Motor Using TRIAC and RPM MeasurementDokument6 SeitenSpeed Control of Single Phase Induction Motor Using TRIAC and RPM MeasurementHammad MughalNoch keine Bewertungen
- EXP 1-10 Manual HV LabbbbbbbbbbbbbbvbbbbbbbbDokument37 SeitenEXP 1-10 Manual HV LabbbbbbbbbbbbbbvbbbbbbbbDEEPAK KUMAR SINGHNoch keine Bewertungen
- Chapter Three2Dokument12 SeitenChapter Three2Fuh ValleryNoch keine Bewertungen
- Control IC for switched-mode power supplies using MOS transistors (TDA 4605-2Dokument20 SeitenControl IC for switched-mode power supplies using MOS transistors (TDA 4605-2foxx034Noch keine Bewertungen
- Altair 05 TRDokument27 SeitenAltair 05 TRGenivaldo CostaNoch keine Bewertungen
- XX3842 Series FunctionDokument7 SeitenXX3842 Series FunctionbernabethNoch keine Bewertungen
- An Imprint of IC IC 555 Timer in The Contemporary World He ContemporaryDokument4 SeitenAn Imprint of IC IC 555 Timer in The Contemporary World He ContemporaryChinnapogula dineshNoch keine Bewertungen
- Design and Development of ON-LINE UPS Using PIC MicrocontrollerDokument6 SeitenDesign and Development of ON-LINE UPS Using PIC MicrocontrollerreemaNoch keine Bewertungen
- IC 741 Op Amp Specifications and ApplicationsDokument90 SeitenIC 741 Op Amp Specifications and ApplicationsAhmed Al MansurNoch keine Bewertungen
- 555 TimerDokument3 Seiten555 TimerPraveen KumarNoch keine Bewertungen
- Kapasitor MikroDokument5 SeitenKapasitor MikroDiki SuryadiNoch keine Bewertungen
- Control DVR Using PI, Fuzzy, and Neural NetworkDokument6 SeitenControl DVR Using PI, Fuzzy, and Neural NetworkrezhaNoch keine Bewertungen
- Sisngle Phase RectifierDokument5 SeitenSisngle Phase RectifiermücahitNoch keine Bewertungen
- An 18Dokument12 SeitenAn 18teomondoNoch keine Bewertungen
- Pic Microcontroller Based 3 Phase Induction Motor Protection SystemDokument5 SeitenPic Microcontroller Based 3 Phase Induction Motor Protection SystemNaveen ChandarNoch keine Bewertungen
- Design of AC Chopper Voltage Regulator Based On PIC16F716 MicrocontrollerDokument4 SeitenDesign of AC Chopper Voltage Regulator Based On PIC16F716 MicrocontrollerabfstbmsodNoch keine Bewertungen
- Design and Implementation of Low CostDokument4 SeitenDesign and Implementation of Low Costpratyushsakpal-elecNoch keine Bewertungen
- AUTO CONTROLLER FOR PETROL (Revised)Dokument25 SeitenAUTO CONTROLLER FOR PETROL (Revised)Hamed RazaNoch keine Bewertungen
- IC555 TimerDokument8 SeitenIC555 TimerRaflysyah PutraNoch keine Bewertungen
- Auto Phase Switching in A 3 Phase SytemDokument10 SeitenAuto Phase Switching in A 3 Phase SytemAnshu HilsaNoch keine Bewertungen
- IEEE - 3 Phase Automatic ChangeoverDokument3 SeitenIEEE - 3 Phase Automatic ChangeoverDuhanNoch keine Bewertungen
- Pci Lab ManualDokument32 SeitenPci Lab ManualrkshpatnaikNoch keine Bewertungen
- Process Control Lab ManualDokument32 SeitenProcess Control Lab ManualRakesh Kumar Patnaik50% (2)
- Report IC 555 TimerDokument17 SeitenReport IC 555 TimerSantosh YadavNoch keine Bewertungen
- Uc Power Control PDFDokument6 SeitenUc Power Control PDFjokerNoch keine Bewertungen
- IC-Applications U4Dokument21 SeitenIC-Applications U4kavithavenkatesanNoch keine Bewertungen
- Power Electronics Module on ThyristorsDokument14 SeitenPower Electronics Module on ThyristorsChetangouda PatilNoch keine Bewertungen
- Perform Transformer Over Current Protection Scheme: Prepared By: B.R.PrajapatiDokument2 SeitenPerform Transformer Over Current Protection Scheme: Prepared By: B.R.PrajapatiBhavik PrajapatiNoch keine Bewertungen
- Design and Simulation of Triggering Circ PDFDokument4 SeitenDesign and Simulation of Triggering Circ PDFYimy GarciaNoch keine Bewertungen
- Ir Remote Control Switch Report PrintDokument36 SeitenIr Remote Control Switch Report Print8bitrebellionNoch keine Bewertungen
- Automated Unified System For LPG UsingDokument84 SeitenAutomated Unified System For LPG UsingVirat KaliNoch keine Bewertungen
- Timer 555 - ManualDokument20 SeitenTimer 555 - ManualXen XeonNoch keine Bewertungen
- Electronics Lab ManualDokument92 SeitenElectronics Lab ManualVolodya SmolyakNoch keine Bewertungen
- 1.automatic Electrical Phase Change OverDokument47 Seiten1.automatic Electrical Phase Change OvermboomiNoch keine Bewertungen
- Microcontroller-based low-cost voltage protectionDokument5 SeitenMicrocontroller-based low-cost voltage protectionAbdul KutaNoch keine Bewertungen
- MW Inverter IC RM6203Dokument7 SeitenMW Inverter IC RM6203KybernetikumNoch keine Bewertungen
- Chapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerDokument48 SeitenChapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerOdebunmi NathanielNoch keine Bewertungen
- Power Electronic Switch Component: For PSCAD Version 5.0Dokument14 SeitenPower Electronic Switch Component: For PSCAD Version 5.0David UribeNoch keine Bewertungen
- Report MosfetDokument13 SeitenReport MosfetaiswaryaNoch keine Bewertungen
- Design 200amp Using 50 Amp Telecom Rectifier Family DC-DC ConvertersDokument5 SeitenDesign 200amp Using 50 Amp Telecom Rectifier Family DC-DC ConvertersmanjtobssNoch keine Bewertungen
- LoDokument2 SeitenLoFuh ValleryNoch keine Bewertungen
- Microcontroller Based Power Transformer Protection Highbrigde Solar Oil Mills For Local Farmers Hovatek For Video DownloadDokument1 SeiteMicrocontroller Based Power Transformer Protection Highbrigde Solar Oil Mills For Local Farmers Hovatek For Video DownloadFuh ValleryNoch keine Bewertungen
- Electrical Engineer (Professional) CLASSIC TemplateDokument1 SeiteElectrical Engineer (Professional) CLASSIC TemplateNguyen LongNoch keine Bewertungen
- Writing Application LetterDokument6 SeitenWriting Application LetterNouman Ahmed HelaliNoch keine Bewertungen
- Interfacing GSM Module With PIC MicrocontrollerDokument5 SeitenInterfacing GSM Module With PIC MicrocontrollerFuh Vallery100% (2)
- ACS754 CurrentSensorDokument11 SeitenACS754 CurrentSensorFuh Vallery100% (2)
- Create UIs Using XMLDokument11 SeitenCreate UIs Using XMLVaheed AhammedNoch keine Bewertungen
- Refridgeration WorkshopDokument1 SeiteRefridgeration WorkshopFuh ValleryNoch keine Bewertungen
- En CD00153725Dokument18 SeitenEn CD00153725Fuh ValleryNoch keine Bewertungen
- Interfacing GSM Module With PIC MicrocontrollerDokument5 SeitenInterfacing GSM Module With PIC MicrocontrollerFuh Vallery100% (2)
- AC Power Control With Thyristor Using Pic MicrocontrollerDokument10 SeitenAC Power Control With Thyristor Using Pic MicrocontrollerFuh Vallery100% (2)
- 2006 18 Spring Wiring Matters Power Factor Correction PFCDokument3 Seiten2006 18 Spring Wiring Matters Power Factor Correction PFCArsyad Harus SemangattNoch keine Bewertungen
- SD Card Upgrade Operating InstructionDokument3 SeitenSD Card Upgrade Operating InstructionFuh ValleryNoch keine Bewertungen
- Chapter Three2Dokument12 SeitenChapter Three2Fuh ValleryNoch keine Bewertungen
- Design Construction Solar ChargerDokument6 SeitenDesign Construction Solar Chargervlady_2009Noch keine Bewertungen
- SD Card Upgrade Operating InstructionDokument3 SeitenSD Card Upgrade Operating InstructionFuh ValleryNoch keine Bewertungen
- Compressor Diagram of FridgeDokument1 SeiteCompressor Diagram of FridgeFuh ValleryNoch keine Bewertungen
- RefrigerationDokument6 SeitenRefrigerationJerin CyriacNoch keine Bewertungen
- PIC Based Solar DC Power System with Supercapacitor and Sepic ConvertorDokument10 SeitenPIC Based Solar DC Power System with Supercapacitor and Sepic ConvertorFuh ValleryNoch keine Bewertungen
- MINIMISING PENALTY INDUSTRIAL POWER CONSUMPTION APFCDokument2 SeitenMINIMISING PENALTY INDUSTRIAL POWER CONSUMPTION APFCFuh ValleryNoch keine Bewertungen
- Reactive Power and Voltage ControlDokument2 SeitenReactive Power and Voltage ControlFuh ValleryNoch keine Bewertungen
- Core8051 DsDokument41 SeitenCore8051 DsMinh Trí KnightNoch keine Bewertungen
- Compressor Diagram of FridgeDokument1 SeiteCompressor Diagram of FridgeFuh ValleryNoch keine Bewertungen
- 8051 DatasheetDokument140 Seiten8051 DatasheetDharishNoch keine Bewertungen
- Hybrid Power Generation Using Solar and Wind EnergyDokument7 SeitenHybrid Power Generation Using Solar and Wind EnergyFuh ValleryNoch keine Bewertungen
- E. Market Size PotentialDokument4 SeitenE. Market Size Potentialmesadaeterjohn.studentNoch keine Bewertungen
- Importance and Behavior of Capital Project Benefits Factors in Practice: Early EvidenceDokument13 SeitenImportance and Behavior of Capital Project Benefits Factors in Practice: Early EvidencevimalnandiNoch keine Bewertungen
- Grate Inlet Skimmer Box ™ (GISB™ ) Suntree Technologies Service ManualDokument4 SeitenGrate Inlet Skimmer Box ™ (GISB™ ) Suntree Technologies Service ManualOmar Rodriguez OrtizNoch keine Bewertungen
- BurhanresumeDokument1 SeiteBurhanresumeAbdul Rangwala0% (1)
- Project Proposal: Retail Environment Design To Create Brand ExperienceDokument3 SeitenProject Proposal: Retail Environment Design To Create Brand ExperienceMithin R KumarNoch keine Bewertungen
- 1 s2.0 S0313592622001369 MainDokument14 Seiten1 s2.0 S0313592622001369 MainNGOC VO LE THANHNoch keine Bewertungen
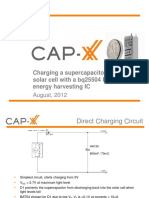
- 1208 CAP XX Charging A Supercapacitor From A Solar Cell PDFDokument12 Seiten1208 CAP XX Charging A Supercapacitor From A Solar Cell PDFmehralsmenschNoch keine Bewertungen
- Siemens ProjectDokument17 SeitenSiemens ProjectMayisha Alamgir100% (1)
- Oteco 3Dokument12 SeitenOteco 3VRV.RELATORIO.AVARIA RELATORIO.AVARIANoch keine Bewertungen
- Optimization TheoryDokument18 SeitenOptimization TheoryDivine Ada PicarNoch keine Bewertungen
- JDC Merchanndising ActivityDokument6 SeitenJDC Merchanndising ActivityShaira Sahibad100% (1)
- What is Software Development Life Cycle (SDLC)? Key Phases and ActivitiesDokument11 SeitenWhat is Software Development Life Cycle (SDLC)? Key Phases and ActivitiessachinNoch keine Bewertungen
- Parents Day Script - PDF - Schools - LeisureDokument17 SeitenParents Day Script - PDF - Schools - LeisureNAIDU SHAKEENANoch keine Bewertungen
- CANDIDATE'S BIO DATADokument2 SeitenCANDIDATE'S BIO DATAAamir ArainNoch keine Bewertungen
- Pumping Station Modification PDFDokument15 SeitenPumping Station Modification PDFcarlosnavalmaster100% (1)
- Green Ecobuses Run On This Route.: BusesDokument6 SeitenGreen Ecobuses Run On This Route.: BusesLuis DíazNoch keine Bewertungen
- Creating Rapid Prototype Metal CastingsDokument10 SeitenCreating Rapid Prototype Metal CastingsShri JalihalNoch keine Bewertungen
- GSR Azure High Level ArchitectureDokument4 SeitenGSR Azure High Level ArchitectureCSKNoch keine Bewertungen
- Autocad 2016Dokument59 SeitenAutocad 2016Kaye OleaNoch keine Bewertungen
- Letter Advocating For Hazard PayDokument2 SeitenLetter Advocating For Hazard PayQueens PostNoch keine Bewertungen
- Parts 3121106 1-2-12 ANSI EnglishDokument246 SeitenParts 3121106 1-2-12 ANSI EnglishAndres JimenezNoch keine Bewertungen
- Impact of COVIDDokument29 SeitenImpact of COVIDMalkOo AnjumNoch keine Bewertungen
- Integrated Building Management Platform for Security, Maintenance and Energy EfficiencyDokument8 SeitenIntegrated Building Management Platform for Security, Maintenance and Energy EfficiencyRajesh RajendranNoch keine Bewertungen
- Circulation in Vacuum Pans: January 2004Dokument18 SeitenCirculation in Vacuum Pans: January 2004REMINGTON SALAYANoch keine Bewertungen
- Chpter 06 QuizDokument3 SeitenChpter 06 QuizGall AnonimNoch keine Bewertungen