Das könnte Ihnen auch gefallen
- $R6GWGO6Dokument9 Seiten$R6GWGO6kalayil78Noch keine Bewertungen
- Vea Pa Que Se Entretenga AprendiendoDokument24 SeitenVea Pa Que Se Entretenga AprendiendoJoseph Borja HernandezNoch keine Bewertungen
- CS2ASSIGNMENTDokument16 SeitenCS2ASSIGNMENTalokb210846eeNoch keine Bewertungen
- #Include #Include #Include : P, N Ntimes (Appear (Event) )Dokument10 Seiten#Include #Include #Include : P, N Ntimes (Appear (Event) )ssfofoNoch keine Bewertungen
- Program No. 1: Unit RampDokument16 SeitenProgram No. 1: Unit RamplucasNoch keine Bewertungen
- JamDokument5 SeitenJamakun tb02Noch keine Bewertungen
- Matlab LectureDokument6 SeitenMatlab Lecturekafle_yrsNoch keine Bewertungen
- Constanta Depi MatlabDokument7 SeitenConstanta Depi MatlabAdrian HurmuzNoch keine Bewertungen
- % Bsformula.mDokument30 Seiten% Bsformula.mapi-616455436Noch keine Bewertungen
- DSP Lab ManualDokument51 SeitenDSP Lab ManualShahin4220Noch keine Bewertungen
- Experiment No: 13 Transient and Steady State Response AnalysisDokument28 SeitenExperiment No: 13 Transient and Steady State Response Analysisayesha amjadNoch keine Bewertungen
- Iam760 hw1Dokument8 SeitenIam760 hw1tsevineNoch keine Bewertungen
- Spin Dynamics Study of 1D Heisenberg ModelDokument9 SeitenSpin Dynamics Study of 1D Heisenberg Modelt_sairamNoch keine Bewertungen
- Control Theory Python SummaryDokument25 SeitenControl Theory Python SummaryPythonraptorNoch keine Bewertungen
- Regression: 1 Implementación de Métodos de RegresiónDokument11 SeitenRegression: 1 Implementación de Métodos de RegresiónÓscar Alfonso Gómez SepúlvedaNoch keine Bewertungen
- Advanced Communication Lab (15ECL76)Dokument15 SeitenAdvanced Communication Lab (15ECL76)kimberly100% (1)
- (a) Delta function: δ (n) .: 1. Plot the following functions using MATLABDokument7 Seiten(a) Delta function: δ (n) .: 1. Plot the following functions using MATLABGorakh Raj JoshiNoch keine Bewertungen
- Domaci Pedja: For For If End End EndDokument10 SeitenDomaci Pedja: For For If End End EndМарко БулатовићNoch keine Bewertungen
- Assignment2 Am56303Dokument20 SeitenAssignment2 Am56303Anuj SaidNoch keine Bewertungen
- Prac Control 5-06-23Dokument13 SeitenPrac Control 5-06-23Anderson Eduardo Daviran RiveraNoch keine Bewertungen
- CS LabDokument16 SeitenCS LabJeremy HensleyNoch keine Bewertungen
- Student Workshop Discrete IMCDokument20 SeitenStudent Workshop Discrete IMCAlli-Oke Olusegun RazakNoch keine Bewertungen
- Digital Signal Processing Lab: Practical RecordDokument30 SeitenDigital Signal Processing Lab: Practical RecordAnveshGopalamNoch keine Bewertungen
- Control System Mini Project-1Dokument7 SeitenControl System Mini Project-1Binod MalikNoch keine Bewertungen
- cs-2 Lab CodesDokument9 Seitencs-2 Lab CodesBharathNoch keine Bewertungen
- MATLAB Full Lab ReportDokument30 SeitenMATLAB Full Lab ReportactuatorNoch keine Bewertungen
- Modul Adsp Lab 2 PDFDokument4 SeitenModul Adsp Lab 2 PDFAfif FaizianurNoch keine Bewertungen
- MATLAB Files (PDF)Dokument9 SeitenMATLAB Files (PDF)Asad MeerNoch keine Bewertungen
- HW 14Dokument12 SeitenHW 14api-465474049Noch keine Bewertungen
- Final CSDokument28 SeitenFinal CSkvbrothers2004Noch keine Bewertungen
- I. Unit Step Function/ Delay Function (Discrete Function) : 1. Generations of WaveformsDokument5 SeitenI. Unit Step Function/ Delay Function (Discrete Function) : 1. Generations of WaveformsNisha SinghNoch keine Bewertungen
- University of Southeastern PhilippinesDokument25 SeitenUniversity of Southeastern PhilippinesOmosay Gap ElgyzonNoch keine Bewertungen
- Assignment 4Dokument6 SeitenAssignment 4Common ManNoch keine Bewertungen
- Kilian 2009 CodeDokument25 SeitenKilian 2009 CodeJongkol NaenonNoch keine Bewertungen
- DSP Lab-01Dokument28 SeitenDSP Lab-01Mekonen AberaNoch keine Bewertungen
- Open Ended Exp DSPDokument55 SeitenOpen Ended Exp DSPTilak shastriNoch keine Bewertungen
- Practical 1: # 2D Linear Convolution, Circular Convolution Between Two 2D MatricesDokument21 SeitenPractical 1: # 2D Linear Convolution, Circular Convolution Between Two 2D MatricesJustin Sebastian100% (1)
- Matematika Biologi Tugas Ke 3Dokument29 SeitenMatematika Biologi Tugas Ke 3Maya MahatmaNoch keine Bewertungen
- Ex 1Dokument13 SeitenEx 1Maan SinghNoch keine Bewertungen
- Codificacion-en-Matlab IFN°3Dokument11 SeitenCodificacion-en-Matlab IFN°3FernandoSerranoRamosNoch keine Bewertungen
- MATLAB Source CodesDokument6 SeitenMATLAB Source CodesArief YazidNoch keine Bewertungen
- Lab 2 DSP. Linear Time-Invariant SystemDokument15 SeitenLab 2 DSP. Linear Time-Invariant SystemTrí TừNoch keine Bewertungen
- AmirzDokument4 SeitenAmirzJHON EDY MAMANI SONCCONoch keine Bewertungen
- 20011P0417 DSP Matlab AssignmentDokument12 Seiten20011P0417 DSP Matlab AssignmentNARENDRANoch keine Bewertungen
- Le Système Non Linéaire Converge Vers Une Trajectoire Différente de Celle Désirait Cela Est Du Au Choix Arbitraire Du Point de La LinearizationDokument5 SeitenLe Système Non Linéaire Converge Vers Une Trajectoire Différente de Celle Désirait Cela Est Du Au Choix Arbitraire Du Point de La Linearizationliza haddadNoch keine Bewertungen
- DSP ProgramDokument118 SeitenDSP ProgramSandeep Banerjee100% (1)
- AssignmentDokument8 SeitenAssignmentshubhamNoch keine Bewertungen
- Ada Lab NewDokument37 SeitenAda Lab Newhenee patelNoch keine Bewertungen
- Ex 3Dokument6 SeitenEx 3Maan SinghNoch keine Bewertungen
- GPU Computing For Unsteady Compressible Flow Using Roe SchemeDokument5 SeitenGPU Computing For Unsteady Compressible Flow Using Roe SchemeMichele TuttafestaNoch keine Bewertungen
- HW 5Dokument6 SeitenHW 5Нурболат ТаласбайNoch keine Bewertungen
- Example From SlidesDokument17 SeitenExample From SlidesShintaNoch keine Bewertungen
- Matlab TipsDokument14 SeitenMatlab Tipsfilip100Noch keine Bewertungen
- NSM Practical Sem II1Dokument12 SeitenNSM Practical Sem II1Mr.Hacker AnupNoch keine Bewertungen
- Ada Lab NewDokument37 SeitenAda Lab Newhenee patelNoch keine Bewertungen
- Matlab CodeDokument23 SeitenMatlab CodesrujanNoch keine Bewertungen
- Assignment 2: AnswerDokument13 SeitenAssignment 2: AnswerAkash Ranjan SahooNoch keine Bewertungen
- Solución de La Asignación 1 Del Curso de R: 1. SolucionesDokument14 SeitenSolución de La Asignación 1 Del Curso de R: 1. SolucionesjuanNoch keine Bewertungen
- I Sem Mathematics LabDokument17 SeitenI Sem Mathematics LabprarthanasangameshNoch keine Bewertungen
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesVon EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesBewertung: 1.5 von 5 Sternen1.5/5 (2)
- Arduino Leonardo + 3 Wire Load Cells + INA125P - Analog Signal Bounce - Noise - Electrical Engineering Stack ExchangeDokument4 SeitenArduino Leonardo + 3 Wire Load Cells + INA125P - Analog Signal Bounce - Noise - Electrical Engineering Stack ExchangeMelanie PowellNoch keine Bewertungen
- Minna No Nihongo 2nd Book IIDokument250 SeitenMinna No Nihongo 2nd Book IIMelanie PowellNoch keine Bewertungen
- (Ronald L. Lipsman, Jonathan M. Rosenberg) Multiva (B-Ok - Xyz)Dokument280 Seiten(Ronald L. Lipsman, Jonathan M. Rosenberg) Multiva (B-Ok - Xyz)Melanie PowellNoch keine Bewertungen
- Xilinx FPGA Design Using Simulink With Hardware Co-SimulationDokument19 SeitenXilinx FPGA Design Using Simulink With Hardware Co-SimulationvlsijpNoch keine Bewertungen
- 329389Dokument11 Seiten329389Melanie PowellNoch keine Bewertungen
- PID Tuning Guide PDFDokument28 SeitenPID Tuning Guide PDFMelanie Powell100% (1)
- Guidelines Aquaponics PublishedDokument69 SeitenGuidelines Aquaponics PublishedMelanie Powell100% (1)
- Development of Dental Autoclave Control System Using Fuzzy Logic and Optimized PID AlgorithmDokument8 SeitenDevelopment of Dental Autoclave Control System Using Fuzzy Logic and Optimized PID AlgorithmMelanie PowellNoch keine Bewertungen
- Optimal Speed Control Single Phase Induction Motor Using Fuzzy ControllerDokument8 SeitenOptimal Speed Control Single Phase Induction Motor Using Fuzzy ControllerMelanie PowellNoch keine Bewertungen
- The Loom of LanguageDokument728 SeitenThe Loom of LanguageMelanie Powell94% (32)
- Development of Dental Autoclave Control System Using Fuzzy Logic and Optimized PID AlgorithmDokument8 SeitenDevelopment of Dental Autoclave Control System Using Fuzzy Logic and Optimized PID AlgorithmMelanie PowellNoch keine Bewertungen
- How Computers WorkDokument158 SeitenHow Computers Workvijai daniel100% (1)
- Pneutrônica - Fluidsim e CLP - Conveyor StationDokument5 SeitenPneutrônica - Fluidsim e CLP - Conveyor StationMelanie PowellNoch keine Bewertungen
- Farmers' Satisfaction With The Paddy Procurement Practices of The National Food Authority in The Province of Palawan, PhilippinesDokument13 SeitenFarmers' Satisfaction With The Paddy Procurement Practices of The National Food Authority in The Province of Palawan, PhilippinesPsychology and Education: A Multidisciplinary JournalNoch keine Bewertungen
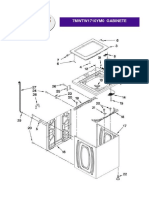
- 7MWTW1710YM0Dokument8 Seiten7MWTW1710YM0Izack-Dy JimZitNoch keine Bewertungen
- Sheep ETU: Apuuga's AmigurumiDokument4 SeitenSheep ETU: Apuuga's Amigurumifiliz8888Noch keine Bewertungen
- Tankguard AR: Technical Data SheetDokument5 SeitenTankguard AR: Technical Data SheetAzar SKNoch keine Bewertungen
- Cyclical Iterative Design Process, Learning From ExperienceDokument7 SeitenCyclical Iterative Design Process, Learning From ExperiencemartinsmitNoch keine Bewertungen
- War As I Knew ItDokument2 SeitenWar As I Knew ItShreyansNoch keine Bewertungen
- Hospital Management System DatabaseDokument18 SeitenHospital Management System DatabasesamdhathriNoch keine Bewertungen
- Project Guidelines (Issued by CBSE) : CA. (DR.) G.S. GrewalDokument51 SeitenProject Guidelines (Issued by CBSE) : CA. (DR.) G.S. GrewalShruti Yadav0% (1)
- Astm A 478 - 97Dokument2 SeitenAstm A 478 - 97neno2405Noch keine Bewertungen
- Airport Demand ModelDokument26 SeitenAirport Demand ModelbsvseyNoch keine Bewertungen
- AFAR Problems PrelimDokument11 SeitenAFAR Problems PrelimLian Garl100% (8)
- CV Najim Square Pharma 4 Years ExperienceDokument2 SeitenCV Najim Square Pharma 4 Years ExperienceDelwarNoch keine Bewertungen
- Surface News - 20130704 - Low Res PDFDokument9 SeitenSurface News - 20130704 - Low Res PDFYoko GoldingNoch keine Bewertungen
- Formula Retail and Large Controls Planning Department ReportDokument235 SeitenFormula Retail and Large Controls Planning Department ReportMissionLocalNoch keine Bewertungen
- A Case Study From The: PhilippinesDokument2 SeitenA Case Study From The: PhilippinesNimNoch keine Bewertungen
- Craske - Mastering Your Fears and FobiasDokument174 SeitenCraske - Mastering Your Fears and Fobiasjuliana218Noch keine Bewertungen
- PDFDokument18 SeitenPDFDental LabNoch keine Bewertungen
- Important Terms in ObliconDokument4 SeitenImportant Terms in ObliconAriana Cristelle L. Pagdanganan100% (1)
- MODULE 5 - WeirDokument11 SeitenMODULE 5 - WeirGrace MagbooNoch keine Bewertungen
- International Business EnvironmentDokument5 SeitenInternational Business EnvironmentrahulNoch keine Bewertungen
- Pa 28 151 161 - mmv1995 PDFDokument585 SeitenPa 28 151 161 - mmv1995 PDFJonatan JonatanBernalNoch keine Bewertungen
- Tourism: The Business of Hospitality and TravelDokument33 SeitenTourism: The Business of Hospitality and TravelNajla Nabila AurelliaNoch keine Bewertungen
- Steinway Case - CH 03Dokument5 SeitenSteinway Case - CH 03Twēéty TuiñkleNoch keine Bewertungen
- Evaluating The Policy Outcomes For Urban Resiliency in Informal Settlements Since Independence in Dhaka, Bangladesh: A ReviewDokument14 SeitenEvaluating The Policy Outcomes For Urban Resiliency in Informal Settlements Since Independence in Dhaka, Bangladesh: A ReviewJaber AbdullahNoch keine Bewertungen
- LaMOT Rupture DiscsDokument20 SeitenLaMOT Rupture Discshlrich99Noch keine Bewertungen
- Add New Question (Download - PHP? SC Mecon&id 50911)Dokument9 SeitenAdd New Question (Download - PHP? SC Mecon&id 50911)AnbarasanNoch keine Bewertungen
- TIP - IPBT M - E For MentorsDokument3 SeitenTIP - IPBT M - E For Mentorsallan galdianoNoch keine Bewertungen
- Asme Pvho-2-2019Dokument61 SeitenAsme Pvho-2-2019Vijay KumarNoch keine Bewertungen
- Ex 6 Duo - 2021 Open-Macroeconomics Basic Concepts: Part 1: Multple ChoicesDokument6 SeitenEx 6 Duo - 2021 Open-Macroeconomics Basic Concepts: Part 1: Multple ChoicesTuyền Lý Thị LamNoch keine Bewertungen
- O-CNN: Octree-Based Convolutional Neural Networks For 3D Shape AnalysisDokument11 SeitenO-CNN: Octree-Based Convolutional Neural Networks For 3D Shape AnalysisJose Angel Duarte MartinezNoch keine Bewertungen