Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- AN10 - Driver List - WIN10 - X64 - V0.11 - 20191212Dokument7 SeitenAN10 - Driver List - WIN10 - X64 - V0.11 - 20191212RIAN ABDILLAHNoch keine Bewertungen
- LEXand YACCDokument21 SeitenLEXand YACCAya AbdAllah AmmarNoch keine Bewertungen
- T Mon ADMIN User ManualDokument30 SeitenT Mon ADMIN User ManualAbdalhakeem Al turkyNoch keine Bewertungen
- CD Unit-3 Part-2Dokument21 SeitenCD Unit-3 Part-2dartionjpNoch keine Bewertungen
- Deep Learning Using Python + Keras (Chapter 3) - ResNet - CodeProjectDokument24 SeitenDeep Learning Using Python + Keras (Chapter 3) - ResNet - CodeProjectGabriel GomesNoch keine Bewertungen
- Lab Manual: Mplab Code Configurator & Core Independent PeripheralsDokument18 SeitenLab Manual: Mplab Code Configurator & Core Independent PeripheralsJavier Alejandro QuingaNoch keine Bewertungen
- Inheritance: This Photo CC By-SaDokument67 SeitenInheritance: This Photo CC By-SaMehranisLiveNoch keine Bewertungen
- IBM Integration Bus: Lab 6 Resolving Choices Using DiscriminatorsDokument29 SeitenIBM Integration Bus: Lab 6 Resolving Choices Using DiscriminatorsLe Duc AnhNoch keine Bewertungen
- Medical Billing Final PDFDokument363 SeitenMedical Billing Final PDFRasgulla GeeNoch keine Bewertungen
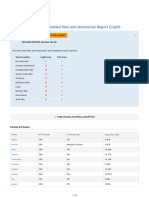
- URL Fuzzer - Discover Hidden Files and Directories Report (Light)Dokument2 SeitenURL Fuzzer - Discover Hidden Files and Directories Report (Light)Segah Beste ÖnerNoch keine Bewertungen
- EMS - Administrators GuideDokument419 SeitenEMS - Administrators GuideNelson MacedoNoch keine Bewertungen
- Smart Shopping Cart With Automated Billing System IJERTCONV8IS11021Dokument4 SeitenSmart Shopping Cart With Automated Billing System IJERTCONV8IS11021SahithiNoch keine Bewertungen
- Xaplogo Plus Version 2.0.0 Operating Guide: Thu Sep 18 10:43:47 2003Dokument22 SeitenXaplogo Plus Version 2.0.0 Operating Guide: Thu Sep 18 10:43:47 2003syamsul maarifNoch keine Bewertungen
- WeighSouth Standard Bench Scale Instruction ManualDokument19 SeitenWeighSouth Standard Bench Scale Instruction Manualmoises castroNoch keine Bewertungen
- Sadia Tahsin Mukta - Lesson - 1 - Exercise - 1Dokument2 SeitenSadia Tahsin Mukta - Lesson - 1 - Exercise - 1mahbubul alamNoch keine Bewertungen
- DevOps Thesis Final PDFDokument79 SeitenDevOps Thesis Final PDFnaviat204Noch keine Bewertungen
- Template - Mini Project ReportDokument64 SeitenTemplate - Mini Project Reportbomb1 squadNoch keine Bewertungen
- Railway Reservation AND Management System: M A J UDokument29 SeitenRailway Reservation AND Management System: M A J Usyed arqum Sultan100% (1)
- LogDokument13 SeitenLogRskaayantiiNoch keine Bewertungen
- CS127-8L - Problem Solving and Programming 2 (Laboratory) FA1.2: Program Exercise # 2Dokument12 SeitenCS127-8L - Problem Solving and Programming 2 (Laboratory) FA1.2: Program Exercise # 2Marvin CincoNoch keine Bewertungen
- Radio Communication Analyzer MT8821C: Product IntroductionDokument47 SeitenRadio Communication Analyzer MT8821C: Product IntroductionGIRISH TSNoch keine Bewertungen
- An Operating System MBADokument15 SeitenAn Operating System MBAShwetaNoch keine Bewertungen
- Shortest Path AlgorithmsDokument94 SeitenShortest Path AlgorithmsZryan MuhammedNoch keine Bewertungen
- 01 Introreview PDFDokument130 Seiten01 Introreview PDFMeenakshiNoch keine Bewertungen
- Troubleshooting E1Page Generator IssuesDokument6 SeitenTroubleshooting E1Page Generator Issueskitty8200Noch keine Bewertungen
- Microsoft Certification Poster - February 2022Dokument1 SeiteMicrosoft Certification Poster - February 2022Codie ManNoch keine Bewertungen
- List of TCP and UDP Port Numbers: From Wikipedia, The Free EncyclopediaDokument74 SeitenList of TCP and UDP Port Numbers: From Wikipedia, The Free Encyclopediamario_iv1100% (1)
- E-Commerce Web Application For FarmersDokument20 SeitenE-Commerce Web Application For Farmerssce21cs079Noch keine Bewertungen
- Output LogDokument840 SeitenOutput LogRisnaNoch keine Bewertungen
- 50eya2u (V02.2020)Dokument4 Seiten50eya2u (V02.2020)TuanNoch keine Bewertungen