Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- History of computers from abacus to fifth generationDokument5 SeitenHistory of computers from abacus to fifth generationRaturi DeepankarNoch keine Bewertungen
- Frequency Control and Regulating Reserves: Asko VuorinenDokument38 SeitenFrequency Control and Regulating Reserves: Asko VuorinenRaturi DeepankarNoch keine Bewertungen
- Memory Storage 77Dokument5 SeitenMemory Storage 77Raturi DeepankarNoch keine Bewertungen
- Ms Office Icons Toolbars 24Dokument14 SeitenMs Office Icons Toolbars 24Raturi DeepankarNoch keine Bewertungen
- Definitions and Facts About Zeros of MIMO SystemsDokument12 SeitenDefinitions and Facts About Zeros of MIMO SystemssamueleNoch keine Bewertungen
- Power FlowsDokument42 SeitenPower FlowsRaturi DeepankarNoch keine Bewertungen
- RTD and ThermocoupleDokument12 SeitenRTD and ThermocoupleRaturi DeepankarNoch keine Bewertungen
- Computer Networks - Components, Types, Topologies & OSI ModelDokument6 SeitenComputer Networks - Components, Types, Topologies & OSI ModelRaturi DeepankarNoch keine Bewertungen
- Basic Function of Computer Hardware 15Dokument7 SeitenBasic Function of Computer Hardware 15Raturi DeepankarNoch keine Bewertungen
- K. R. Padiyar Auth. Analysis of Subsynchronous Resonance in Power Systems PDFDokument271 SeitenK. R. Padiyar Auth. Analysis of Subsynchronous Resonance in Power Systems PDFDaniel Turizo100% (1)
- Control of Voltage Source Converters for Offshore Wind Power TransmissionDokument69 SeitenControl of Voltage Source Converters for Offshore Wind Power TransmissionAsad W. QureshiNoch keine Bewertungen
- Chapter 12Dokument23 SeitenChapter 12sachin235Noch keine Bewertungen
- AnalysisMethods SSR SSCI SSTIDokument27 SeitenAnalysisMethods SSR SSCI SSTIRaturi DeepankarNoch keine Bewertungen
- Transformations and Applications v4Dokument36 SeitenTransformations and Applications v4Raturi DeepankarNoch keine Bewertungen
- Cover Letter ExampDokument1 SeiteCover Letter ExampRaturi DeepankarNoch keine Bewertungen
- Analysis of Subsynchronous Resonance in Power Systems: Printed BookDokument1 SeiteAnalysis of Subsynchronous Resonance in Power Systems: Printed BookRaturi DeepankarNoch keine Bewertungen
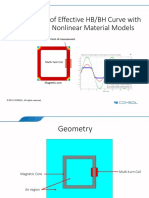
- Effective HB or BH Curve ComparisonDokument10 SeitenEffective HB or BH Curve ComparisonRaturi DeepankarNoch keine Bewertungen
- 2review Mechanical SystemsDokument9 Seiten2review Mechanical SystemsRaturi DeepankarNoch keine Bewertungen
- This Data Was Generated Using The Function Definition: Sin (2 Pi Freq Time) Here, Time Is Defined As Integer Multiples of The Sampling FrequencyDokument44 SeitenThis Data Was Generated Using The Function Definition: Sin (2 Pi Freq Time) Here, Time Is Defined As Integer Multiples of The Sampling FrequencyRaturi DeepankarNoch keine Bewertungen
- Important PhasorsDokument22 SeitenImportant PhasorsRaturi DeepankarNoch keine Bewertungen
- Fact Sheet Highly Effective Damping of Impact Loads enDokument4 SeitenFact Sheet Highly Effective Damping of Impact Loads enRaturi DeepankarNoch keine Bewertungen
- Vibrations HellDokument20 SeitenVibrations Hellbalajeemech2010Noch keine Bewertungen
- A Short Course On Synchronous Machines & Synchronous CondensersDokument113 SeitenA Short Course On Synchronous Machines & Synchronous CondensersMazen Al-AArikyNoch keine Bewertungen
- Frequency Control and Regulating Reserves ExplainedDokument38 SeitenFrequency Control and Regulating Reserves ExplainedRaturi DeepankarNoch keine Bewertungen
- Power Electronics - P. S. Bimbra PDFDokument154 SeitenPower Electronics - P. S. Bimbra PDFTaruna SharmaNoch keine Bewertungen
- Thesis1 PDFDokument16 SeitenThesis1 PDFRaturi DeepankarNoch keine Bewertungen
- A CDC Module Users GuideDokument306 SeitenA CDC Module Users GuideRaturi DeepankarNoch keine Bewertungen
- This Data Was Generated Using The Function Definition: Sin (2 Pi Freq Time) Here, Time Is Defined As Integer Multiples of The Sampling FrequencyDokument44 SeitenThis Data Was Generated Using The Function Definition: Sin (2 Pi Freq Time) Here, Time Is Defined As Integer Multiples of The Sampling FrequencyRaturi DeepankarNoch keine Bewertungen
- FFT ExerciseDokument3 SeitenFFT ExerciseYusufAdiNNoch keine Bewertungen
- Timing AppNote (GPS.G6-X-11007) PDFDokument14 SeitenTiming AppNote (GPS.G6-X-11007) PDFyodhakaaNoch keine Bewertungen
- TCT3hl 3Dokument144 SeitenTCT3hl 3ashish118Noch keine Bewertungen
- Alexan Prodlist2012Dokument56 SeitenAlexan Prodlist2012Ivan Paul SyNoch keine Bewertungen
- IRMCF341: Sensorless Motor Control IC For AppliancesDokument32 SeitenIRMCF341: Sensorless Motor Control IC For AppliancesAbid ali SiddiquiNoch keine Bewertungen
- RF Architectures & Digital Signal Processing Aspects of Digital Wireless TransceiversDokument20 SeitenRF Architectures & Digital Signal Processing Aspects of Digital Wireless TransceiversCassio Jose FonsecaNoch keine Bewertungen
- DatasheetDokument10 SeitenDatasheetJose SalgueroNoch keine Bewertungen
- Schumann Resonance, Psychophysical Regulation & Psi (Part I) Iona MillerDokument13 SeitenSchumann Resonance, Psychophysical Regulation & Psi (Part I) Iona MillermaravindanNoch keine Bewertungen
- A-80 UHF Service Manual GuideDokument50 SeitenA-80 UHF Service Manual GuideJadi Purwono100% (1)
- Brochure Atv168 20110927Dokument1 SeiteBrochure Atv168 20110927budieswaNoch keine Bewertungen
- Mpc8349E Powerquicc™ Ii Pro Integrated Host Processor Hardware SpecificationsDokument88 SeitenMpc8349E Powerquicc™ Ii Pro Integrated Host Processor Hardware Specificationscatsoithahuong84Noch keine Bewertungen
- DW3000 Data SheetDokument56 SeitenDW3000 Data Sheetsimog1972Noch keine Bewertungen
- Strda9000es TWPDokument33 SeitenStrda9000es TWPfernando.pagnottaNoch keine Bewertungen
- Lecture #11 Optical ReceiversDokument42 SeitenLecture #11 Optical Receiversjeddo2005Noch keine Bewertungen
- pcshw3 SolnDokument6 Seitenpcshw3 SolnBhuvaneshwari BNoch keine Bewertungen
- FPGA-based AM/FM Software Radio ReceiverDokument11 SeitenFPGA-based AM/FM Software Radio ReceiverphamcaodaiNoch keine Bewertungen
- FPGA Field-Programmable Gate Array GuideDokument7 SeitenFPGA Field-Programmable Gate Array GuideShreyas S RNoch keine Bewertungen
- Design of Analog CMOS Integrated CircuitsDokument7 SeitenDesign of Analog CMOS Integrated CircuitsKuroko TetsuyaNoch keine Bewertungen
- Principles of Electronic Communication SystemsDokument76 SeitenPrinciples of Electronic Communication Systemsmehul03ecNoch keine Bewertungen
- Tutorial Guide For PICsDokument27 SeitenTutorial Guide For PICsJose Smith100% (1)
- Introduction To The Superheterodyne ReceiverDokument24 SeitenIntroduction To The Superheterodyne ReceiverPrashant KubdeNoch keine Bewertungen
- PLL Control of DC DriveDokument12 SeitenPLL Control of DC DriveRavi ANoch keine Bewertungen
- An5117 PDFDokument43 SeitenAn5117 PDFfuturomp3Noch keine Bewertungen
- Simple Methods For Detecting Zero CrossingDokument5 SeitenSimple Methods For Detecting Zero CrossingOsramNoch keine Bewertungen
- Tricky Linear Integrated Circuits Questions and AnswersDokument4 SeitenTricky Linear Integrated Circuits Questions and AnswersHarith NawfelNoch keine Bewertungen
- Royer Versus Direct DriveDokument27 SeitenRoyer Versus Direct Drivelagreta55Noch keine Bewertungen
- SCD-555ES SERVICE MANUALDokument94 SeitenSCD-555ES SERVICE MANUALkitjunky0% (1)
- Nonlinear Effects in Oscillators and SynthesizersDokument23 SeitenNonlinear Effects in Oscillators and SynthesizersAKISNoch keine Bewertungen
- 3808.flasher c2000Dokument47 Seiten3808.flasher c2000KìCátBiệtHạcNoch keine Bewertungen
- BA01 - Analog IC DesignDokument8 SeitenBA01 - Analog IC DesignCláudio RegisNoch keine Bewertungen
- Bcr-40u Bcr-50v Bcr-220 Owner S Manual Ver 1.7Dokument28 SeitenBcr-40u Bcr-50v Bcr-220 Owner S Manual Ver 1.7cacecocaNoch keine Bewertungen