Das könnte Ihnen auch gefallen
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkVon EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNoch keine Bewertungen
- AC Lab Report NewDokument18 SeitenAC Lab Report NewM.Mohamed SarfrazNoch keine Bewertungen
- Load Test On Three Phase Energy Efficient Induction Motor: Exp. No.: 6 Date: 4.03.2019Dokument6 SeitenLoad Test On Three Phase Energy Efficient Induction Motor: Exp. No.: 6 Date: 4.03.2019RajuNoch keine Bewertungen
- S5 ManualDokument39 SeitenS5 ManualAleena ShajuNoch keine Bewertungen
- AC MOTORS II MANUALDokument46 SeitenAC MOTORS II MANUALKaleru ManideepkumarNoch keine Bewertungen
- Three Phase Induction Motor ReportDokument24 SeitenThree Phase Induction Motor ReportSiddharth NandhanNoch keine Bewertungen
- Electrical Machines ExperimentDokument3 SeitenElectrical Machines ExperimentSimranjit100% (1)
- EE6365 – ELECTRICAL ENGINEERING LABORATORY MANUALDokument58 SeitenEE6365 – ELECTRICAL ENGINEERING LABORATORY MANUALjk100% (1)
- Ac Servo Motor LabDokument23 SeitenAc Servo Motor LabHardik SharmaNoch keine Bewertungen
- Induction Machine ReportDokument24 SeitenInduction Machine ReportSiddharth NandhanNoch keine Bewertungen
- DC Shunt Motor Load Test Simulation & ResultsDokument6 SeitenDC Shunt Motor Load Test Simulation & ResultsBaba YagaNoch keine Bewertungen
- 3 Phase Induction Motor ReportDokument5 Seiten3 Phase Induction Motor ReportOPIYO ONYANGO100% (3)
- EE206: Electromechanics LabDokument9 SeitenEE206: Electromechanics LabRahul ChaudharyNoch keine Bewertungen
- AIM: To Evaluate The Performance and Plot Torque-Slip Characteristic of Three-Phase Induction Motor Using Circle DiagramDokument8 SeitenAIM: To Evaluate The Performance and Plot Torque-Slip Characteristic of Three-Phase Induction Motor Using Circle Diagramsiddhansh jainNoch keine Bewertungen
- s5 Lab Manual Full FinalDokument45 Seitens5 Lab Manual Full FinalananyadeviashokkumarNoch keine Bewertungen
- 1.load Test On DC Shut MotorDokument5 Seiten1.load Test On DC Shut Motorg3v5Noch keine Bewertungen
- Electrical Machines-I Lab Manual R16 Modified PDFDokument83 SeitenElectrical Machines-I Lab Manual R16 Modified PDFsk ibrahimNoch keine Bewertungen
- No Load and Blocked Rotor Test On Three Phase Squirrel Cage Induction MotorDokument8 SeitenNo Load and Blocked Rotor Test On Three Phase Squirrel Cage Induction MotorrohitNoch keine Bewertungen
- Electrical Machines Lab Report for SRM University 2018Dokument57 SeitenElectrical Machines Lab Report for SRM University 2018shiva shakthyNoch keine Bewertungen
- Exp 3Dokument6 SeitenExp 3DHINESH JNoch keine Bewertungen
- Exp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andDokument9 SeitenExp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andSanjay MeenaNoch keine Bewertungen
- Experiment 5Dokument8 SeitenExperiment 5rastgonikoNoch keine Bewertungen
- EES340 Lab07 Group3a2Dokument13 SeitenEES340 Lab07 Group3a2D 9Noch keine Bewertungen
- DCM Lab Manual - 0 PDFDokument45 SeitenDCM Lab Manual - 0 PDFVenkata HemanthNoch keine Bewertungen
- Load Test On 3 Phase Induction MotorDokument4 SeitenLoad Test On 3 Phase Induction MotorAdi AdnanNoch keine Bewertungen
- Experiments EMS IIDokument117 SeitenExperiments EMS IIOsama Tahir100% (1)
- 1ph IM No Load and Block RotorDokument5 Seiten1ph IM No Load and Block RotorKrushna Pisal100% (1)
- Experiment No.2: Operation of D.C Motors, Running and ReversingDokument10 SeitenExperiment No.2: Operation of D.C Motors, Running and Reversingwrya hussainNoch keine Bewertungen
- Testing 3-Phase Induction MotorsDokument12 SeitenTesting 3-Phase Induction MotorsAshok PNoch keine Bewertungen
- Speed Torque Characteristics of 3 Phase Induction MotorDokument4 SeitenSpeed Torque Characteristics of 3 Phase Induction MotorAdi AdnanNoch keine Bewertungen
- DC Motor Characteristics: Torque, Speed & ControlDokument9 SeitenDC Motor Characteristics: Torque, Speed & ControlARTI RAWATNoch keine Bewertungen
- Retardation TestDokument5 SeitenRetardation TestAnkit Shetty100% (1)
- Electrical Machines II LAB MANUALDokument45 SeitenElectrical Machines II LAB MANUALram kumarNoch keine Bewertungen
- No Load and Blocked Rotor Test On Three Phase Wound Rotor Induction MotorDokument8 SeitenNo Load and Blocked Rotor Test On Three Phase Wound Rotor Induction MotorrohitNoch keine Bewertungen
- Load Test of DC Shunt Motor: (Hardware)Dokument10 SeitenLoad Test of DC Shunt Motor: (Hardware)ABHISHEKNoch keine Bewertungen
- ECE3072 Lab 1Dokument6 SeitenECE3072 Lab 1Andre JaberiNoch keine Bewertungen
- EXP7Dokument12 SeitenEXP7issa sabhaNoch keine Bewertungen
- EE6512-Electrical Machines Laboratory - II-1000431998-EM II Lab Manual 2018Dokument122 SeitenEE6512-Electrical Machines Laboratory - II-1000431998-EM II Lab Manual 2018dinesh jNoch keine Bewertungen
- EEL203 Tutorial Test-III - Solutions PDFDokument6 SeitenEEL203 Tutorial Test-III - Solutions PDFvammeenaNoch keine Bewertungen
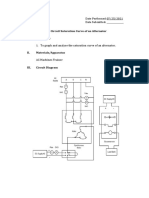
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDokument4 SeitenOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNoch keine Bewertungen
- MT8311 - Electrical Machines ManualDokument20 SeitenMT8311 - Electrical Machines ManualArivanandanNoch keine Bewertungen
- Circuit Diagram: Kprient/Eee/Ee8361 Electrical Engineering LaboratoryDokument6 SeitenCircuit Diagram: Kprient/Eee/Ee8361 Electrical Engineering LaboratorykavineshNoch keine Bewertungen
- Exp 1 N 2Dokument16 SeitenExp 1 N 2mallikarjunbpatilNoch keine Bewertungen
- Machines 2Dokument9 SeitenMachines 2kiprotich allanNoch keine Bewertungen
- EE6365-Electrical Engineering Lab ManualDokument95 SeitenEE6365-Electrical Engineering Lab ManualAishwayaNoch keine Bewertungen
- EE LAB MANUAL FOR ELECTRICAL EXPERIMENTSDokument45 SeitenEE LAB MANUAL FOR ELECTRICAL EXPERIMENTSSai Karthi100% (1)
- Induction MotorsDokument14 SeitenInduction MotorsAbdul RaheemNoch keine Bewertungen
- Load Test of 3-Phase Induction MotorDokument6 SeitenLoad Test of 3-Phase Induction MotorAdarsh Singh100% (1)
- Suraj GahalyanDokument6 SeitenSuraj GahalyanSuraj GahalyanNoch keine Bewertungen
- BRAKE TEST DC SERIES MOTORDokument3 SeitenBRAKE TEST DC SERIES MOTORVARAPRASADNoch keine Bewertungen
- DC Shunt Motor Load Test CharacteristicsDokument24 SeitenDC Shunt Motor Load Test CharacteristicsAnbalagan GuruNoch keine Bewertungen
- Book OldDokument82 SeitenBook OldECEOCETNoch keine Bewertungen
- Experiment No. 5 The Wound Rotor Induction MotorDokument8 SeitenExperiment No. 5 The Wound Rotor Induction MotorJoshua DimasalangNoch keine Bewertungen
- EM-1 LabDokument49 SeitenEM-1 LabApoorvNoch keine Bewertungen
- Chap 7 Solutions PDFDokument34 SeitenChap 7 Solutions PDFIbrahim Hussain100% (1)
- EM-II FinalDokument57 SeitenEM-II FinalAtchyut Satya KumarNoch keine Bewertungen
- Three-phase alternator load test and OCC characteristics determinationDokument7 SeitenThree-phase alternator load test and OCC characteristics determinationKailash Jagarwal100% (1)
- The Hashmite University Electrical Engineering Department Electrical Machines LapDokument6 SeitenThe Hashmite University Electrical Engineering Department Electrical Machines LapMohammed AbadiNoch keine Bewertungen
- tx2 12vDokument7 Seitentx2 12vanviozzyNoch keine Bewertungen
- Ceramic Material and Their Magnetic Properties and Its ApplicationsDokument16 SeitenCeramic Material and Their Magnetic Properties and Its Applicationsarindham chakrabortyNoch keine Bewertungen
- Astm f2412Dokument17 SeitenAstm f2412Nelson Castaño Ciro100% (1)
- Electrical Engineering LaboratoryDokument29 SeitenElectrical Engineering Laboratorybrhanu degeneNoch keine Bewertungen
- Building & Inspecting PV Systems Nec PDFDokument26 SeitenBuilding & Inspecting PV Systems Nec PDFHaytham BafoNoch keine Bewertungen
- Sigmatone: TRIAC Switch To Control High Voltage DevicesDokument2 SeitenSigmatone: TRIAC Switch To Control High Voltage DevicesMariGanesh100% (2)
- 48V50Ah Module SpecificationDokument4 Seiten48V50Ah Module SpecificationhermantoNoch keine Bewertungen
- SA-AKX38PH - AKX38PN (sm-PSG1402005CE) PDFDokument70 SeitenSA-AKX38PH - AKX38PN (sm-PSG1402005CE) PDFJory2005100% (2)
- Draw and calculate voltages in series and parallel circuitsDokument3 SeitenDraw and calculate voltages in series and parallel circuitsBen HoangNoch keine Bewertungen
- System Converts High Frequency EMF to Electrical EnergyDokument15 SeitenSystem Converts High Frequency EMF to Electrical EnergyFabrice BresilNoch keine Bewertungen
- 50 Top Network Analysis Lab Viva Questions and Answers - Eee Eee Viva QuestionsDokument6 Seiten50 Top Network Analysis Lab Viva Questions and Answers - Eee Eee Viva QuestionsDINESHNoch keine Bewertungen
- Projectile MotionDokument4 SeitenProjectile MotionaliNoch keine Bewertungen
- Kinetic Launcher For UAVDokument13 SeitenKinetic Launcher For UAVLord Vario100% (1)
- Namma Kalvi 10th Maths 2nd Midterm Important Sums 215796Dokument20 SeitenNamma Kalvi 10th Maths 2nd Midterm Important Sums 215796SarathNoch keine Bewertungen
- Inverse Trigonometric FunctionsDokument2 SeitenInverse Trigonometric FunctionsArman SinghNoch keine Bewertungen
- R-L-C AC Circuits ExplainedDokument16 SeitenR-L-C AC Circuits ExplainedkhalsnNoch keine Bewertungen
- HVT Substation Equipment - Product List PDFDokument2 SeitenHVT Substation Equipment - Product List PDFAmol DeshmukhNoch keine Bewertungen
- g3rv - j180 E2 02 PDFDokument14 Seiteng3rv - j180 E2 02 PDFSdiri OùMaimàNoch keine Bewertungen
- AN5004Dokument5 SeitenAN5004rdc02271Noch keine Bewertungen
- Physics Question PaperDokument45 SeitenPhysics Question PaperErwin ElloNoch keine Bewertungen
- STB10NK60Z, STP10NK60Z STW10NK60ZDokument19 SeitenSTB10NK60Z, STP10NK60Z STW10NK60ZАлексей ЧумаковNoch keine Bewertungen
- Chapter 19 Angular MomentumDokument29 SeitenChapter 19 Angular Momentumgokcen87Noch keine Bewertungen
- Av-04857 - Pump Selection GuideDokument8 SeitenAv-04857 - Pump Selection GuideViệt Đặng XuânNoch keine Bewertungen
- Electrical Safety Costs LittleDokument40 SeitenElectrical Safety Costs LittleDragomir HoffmannNoch keine Bewertungen
- Bangladesh Physics Olympiad 2013Dokument8 SeitenBangladesh Physics Olympiad 2013Science Olympiad Blog0% (1)
- EEN 330 Electromagnetics I: Dr. M. Bou SanayehDokument32 SeitenEEN 330 Electromagnetics I: Dr. M. Bou SanayehjulioNoch keine Bewertungen
- Axial Generator Calculator MetricDokument48 SeitenAxial Generator Calculator MetricCriss MereutaNoch keine Bewertungen
- Composition of Substances and SolutionsDokument20 SeitenComposition of Substances and SolutionsBante yamiral WondimeNoch keine Bewertungen
- Question ReportDokument32 SeitenQuestion ReporthemavarshiniNoch keine Bewertungen