Das könnte Ihnen auch gefallen
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiVon EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiBewertung: 5 von 5 Sternen5/5 (1)
- Contador de Objetos en Una Faja TransportadoraDokument16 SeitenContador de Objetos en Una Faja TransportadoraJesus Martin Alvarez VasquezNoch keine Bewertungen
- Armónicas en Sistemas Eléctricos IndustrialesVon EverandArmónicas en Sistemas Eléctricos IndustrialesBewertung: 4.5 von 5 Sternen4.5/5 (12)
- Voltimetro 0v A 29v Con Pic Basic PDFDokument8 SeitenVoltimetro 0v A 29v Con Pic Basic PDFAdrianNoch keine Bewertungen
- Timer 555 DisplayDokument9 SeitenTimer 555 DisplayMar SusoNoch keine Bewertungen
- Amplificador Sumador PDFDokument6 SeitenAmplificador Sumador PDFesben fernando martinez palestinaNoch keine Bewertungen
- Tarea 4 Componente Practico Jhonatan RojasDokument16 SeitenTarea 4 Componente Practico Jhonatan Rojasesneyder quevedoNoch keine Bewertungen
- Tarea 4 Componente Practico Jhonatan RojasDokument16 SeitenTarea 4 Componente Practico Jhonatan Rojasdidier castroNoch keine Bewertungen
- Tarea 4 Componente Practico Jhon SanchezDokument21 SeitenTarea 4 Componente Practico Jhon Sanchezesneyder quevedoNoch keine Bewertungen
- Base ComunDokument10 SeitenBase ComunHendry Gaibor PalaciosNoch keine Bewertungen
- Probador de Flyback en CircuitoDokument12 SeitenProbador de Flyback en CircuitoMarianaValen ChNoch keine Bewertungen
- Informe #4 (Detector de Cruce Por Cero y Temporizador On-Delay y Off-Delay)Dokument5 SeitenInforme #4 (Detector de Cruce Por Cero y Temporizador On-Delay y Off-Delay)Juan Camilo Rivera MayaNoch keine Bewertungen
- Probador de FB Mascara de Compnentes Placa de Circuito ImpresoDokument15 SeitenProbador de FB Mascara de Compnentes Placa de Circuito ImpresoCésar GonzálezNoch keine Bewertungen
- Tacómetro DigitalDokument9 SeitenTacómetro DigitalDríade VegasNoch keine Bewertungen
- Cap. 27Dokument8 SeitenCap. 27Programa ClipNoch keine Bewertungen
- Sensor de TemperaturaDokument19 SeitenSensor de TemperaturaHenryTruciosNoch keine Bewertungen
- Lab 5Dokument13 SeitenLab 5Manuel CoaguilaNoch keine Bewertungen
- Como Construir Un Reloj DigitalDokument3 SeitenComo Construir Un Reloj DigitalozielsNoch keine Bewertungen
- Generador de FrecuenciaDokument10 SeitenGenerador de FrecuenciapacoNoch keine Bewertungen
- Microcontroladores: Tercer ParcialDokument138 SeitenMicrocontroladores: Tercer ParcialHeidi Fernanda Segura SánchezNoch keine Bewertungen
- Filtro de Butterworth Pasa BandaDokument4 SeitenFiltro de Butterworth Pasa BandaWilliam Pauzhi IdrovoNoch keine Bewertungen
- El Radio ControlDokument7 SeitenEl Radio ControlPriscila Loreto Arriagada SalasNoch keine Bewertungen
- Generador de Onda Senoidal y DistorsimetroDokument20 SeitenGenerador de Onda Senoidal y DistorsimetroJulio Cesar SaiachNoch keine Bewertungen
- 27 Circuitos Digitales Electrónica CompletaDokument12 Seiten27 Circuitos Digitales Electrónica CompletaCone TecuaniNoch keine Bewertungen
- Informe Reloj DigitalDokument9 SeitenInforme Reloj DigitalJavier CarvajalNoch keine Bewertungen
- Lab 4Dokument14 SeitenLab 4Manuel CoaguilaNoch keine Bewertungen
- Reparaciones de Etapas de Salida Horizontal Sin Transformador Driver Curso Completo de TVDokument9 SeitenReparaciones de Etapas de Salida Horizontal Sin Transformador Driver Curso Completo de TVCintya CardozoNoch keine Bewertungen
- Picerno TV SmartDokument123 SeitenPicerno TV SmartJoaquin Octavio Arango100% (7)
- Electrónica Bàsica Ci555Dokument19 SeitenElectrónica Bàsica Ci555Luis Gerardo Dominguez SalazarNoch keine Bewertungen
- Lab1-Dispositivos II-Configuraciones B. Con OPAM-Rios Blas - C15-4A OKDokument12 SeitenLab1-Dispositivos II-Configuraciones B. Con OPAM-Rios Blas - C15-4A OKJordanG.NoriegaNoch keine Bewertungen
- Informe 1er Lab CEII V2014Dokument29 SeitenInforme 1er Lab CEII V2014Stephen Bardales CáceresNoch keine Bewertungen
- En Primer Lugar Tenemos Un 555 El Cual Se Encuentra Configurado Como MonoestableDokument6 SeitenEn Primer Lugar Tenemos Un 555 El Cual Se Encuentra Configurado Como MonoestableNicolas ZanniNoch keine Bewertungen
- Reporte Lab 1 IEL115Dokument25 SeitenReporte Lab 1 IEL115Saúl Gutiérrez ArguetaNoch keine Bewertungen
- Diseño Receptor AM CarlitoxDokument25 SeitenDiseño Receptor AM CarlitoxCarlos GallardoNoch keine Bewertungen
- Introducción Al PWMDokument4 SeitenIntroducción Al PWMZam HernandezNoch keine Bewertungen
- TP Final Electrónica Digital 2 - Grupo4Dokument14 SeitenTP Final Electrónica Digital 2 - Grupo4Emiliano MarcléNoch keine Bewertungen
- 11.1 Guia PrácticaDokument13 Seiten11.1 Guia PrácticaJimenaAlexandraAroniPazNoch keine Bewertungen
- Práctica 10Dokument9 SeitenPráctica 10NatsuAF9 DRAGNEELNoch keine Bewertungen
- Telecomunicaciones 2Dokument18 SeitenTelecomunicaciones 2Darwin Jesús Arela QuispeNoch keine Bewertungen
- ElectronicaDokument9 SeitenElectronicameteo21Noch keine Bewertungen
- Acoplador de AntenaDokument7 SeitenAcoplador de AntenaSombr@Noch keine Bewertungen
- PspiceDokument7 SeitenPspiceDiego ArmandoNoch keine Bewertungen
- Programa Lm35Dokument9 SeitenPrograma Lm35Zet LaimeNoch keine Bewertungen
- Probador de Servos Con El Integrado 555Dokument8 SeitenProbador de Servos Con El Integrado 555RUBENCHAVEZNoch keine Bewertungen
- UNMSM-IB-OP AMP y AI (07.04.2013)Dokument158 SeitenUNMSM-IB-OP AMP y AI (07.04.2013)Walter Medina LopezNoch keine Bewertungen
- Robotica AvanzadaDokument56 SeitenRobotica AvanzadaIng Jusarez100% (1)
- FrecuencímetroDokument6 SeitenFrecuencímetroFa HermosillaNoch keine Bewertungen
- Tare ADokument6 SeitenTare AVictor DiazNoch keine Bewertungen
- Informe Microcontroladores Con Sensor de TemperaturaDokument4 SeitenInforme Microcontroladores Con Sensor de TemperaturaandreNoch keine Bewertungen
- Experimento 29Dokument3 SeitenExperimento 29samuelNoch keine Bewertungen
- Temporizador 555Dokument10 SeitenTemporizador 555xizuthNoch keine Bewertungen
- Toledo Toro Gonzales Practica FinalDokument9 SeitenToledo Toro Gonzales Practica FinalLIMBERTOLEDONoch keine Bewertungen
- Practica 6 - Oscilador SenoidalDokument7 SeitenPractica 6 - Oscilador SenoidalcielotierraNoch keine Bewertungen
- Regimen ImpulsivoDokument18 SeitenRegimen ImpulsivoAndriu SanchezNoch keine Bewertungen
- Informe Encoder Chimbana LeninDokument8 SeitenInforme Encoder Chimbana LeninJessica PilatasigNoch keine Bewertungen
- Sistema de Encendido 6Dokument6 SeitenSistema de Encendido 6ffranicNoch keine Bewertungen
- Practica de Lab Oratorio Guia 8Dokument10 SeitenPractica de Lab Oratorio Guia 8alexis pedrozaNoch keine Bewertungen
- Informe AdcDokument20 SeitenInforme AdcJouleshans BradleyNoch keine Bewertungen
- GlosarioDokument1 SeiteGlosarioRoberto Carlos Farias CastilloNoch keine Bewertungen
- 2curso (29pag)Dokument29 Seiten2curso (29pag)Alejandro Hernandez ValleNoch keine Bewertungen
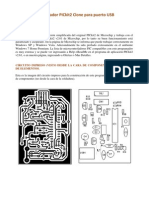
- Programador PICkit2 Clone - JavizhoDokument4 SeitenProgramador PICkit2 Clone - JavizhoLuis Morales MioNoch keine Bewertungen
- Cómo Hacer Un Cargador SolarDokument18 SeitenCómo Hacer Un Cargador SolarRoberto Carlos Farias CastilloNoch keine Bewertungen
- Biolog I Are I No ProtistaDokument16 SeitenBiolog I Are I No ProtistaRoberto Carlos Farias CastilloNoch keine Bewertungen
- Productos NotablesDokument14 SeitenProductos NotablesFelipe Escamilla HdezNoch keine Bewertungen
- Fuentes SimetricasDokument11 SeitenFuentes SimetricasAngel JaimesNoch keine Bewertungen
- Comandos CCNA 1 y CCNA 2 V5 RSDokument14 SeitenComandos CCNA 1 y CCNA 2 V5 RSGian Marco Alexander Rodríguez Vásquez100% (11)
- Sistematizacion de Experiencias de La Red Cientifica PeruanaDokument12 SeitenSistematizacion de Experiencias de La Red Cientifica PeruanaRoberto Carlos Farias CastilloNoch keine Bewertungen
- Backtrack 5 Manual TraducidoDokument298 SeitenBacktrack 5 Manual Traducidoaidc5Noch keine Bewertungen
- Transformada de Fourier de Tiempo ReducidoDokument13 SeitenTransformada de Fourier de Tiempo ReducidoRoberto Carlos Farias CastilloNoch keine Bewertungen
- Trabajo de Efecto DopplerDokument20 SeitenTrabajo de Efecto DopplerRoberto Carlos Farias CastilloNoch keine Bewertungen
- Alarma para El Hogar y Pequeños Negocios Con Enlace Inalámbrico A La Central de MonitoreoDokument76 SeitenAlarma para El Hogar y Pequeños Negocios Con Enlace Inalámbrico A La Central de MonitoreojuliocesarmotaNoch keine Bewertungen
- Cargador de Baterias UniversalDokument11 SeitenCargador de Baterias UniversalRoberto Carlos Farias Castillo100% (1)
- Arrancadores de Motor Electrónicos 2Dokument14 SeitenArrancadores de Motor Electrónicos 2Roberto Carlos Farias CastilloNoch keine Bewertungen
- Lab-1 de TeocomDokument11 SeitenLab-1 de TeocomRoberto Carlos Farias CastilloNoch keine Bewertungen
- Informe de AntenasDokument7 SeitenInforme de AntenasRoberto Carlos Farias CastilloNoch keine Bewertungen
- Ejercicio1 Diseny Filtro MatlabDokument3 SeitenEjercicio1 Diseny Filtro MatlabAnyell Bladimir Aragón MéndezNoch keine Bewertungen
- CH02 - Sistemas DiscretosDokument28 SeitenCH02 - Sistemas DiscretosRoberto Carlos Farias CastilloNoch keine Bewertungen
- Informe de ControlDokument13 SeitenInforme de ControlRoberto Carlos Farias CastilloNoch keine Bewertungen
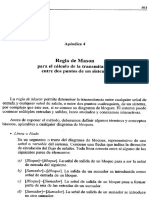
- Regla de MasonDokument9 SeitenRegla de MasonVictor PerugachiNoch keine Bewertungen
- Bobina de Tesla - Manual BásicoDokument9 SeitenBobina de Tesla - Manual BásicoFaustinoAguilarNoch keine Bewertungen
- Control de NivelDokument4 SeitenControl de NivelRoberto Carlos Farias CastilloNoch keine Bewertungen
- 7 Reguladores de Tension IntegradosDokument7 Seiten7 Reguladores de Tension IntegradosPaulomario RemuzgoNoch keine Bewertungen
- Clasificacion de MaquinasDokument8 SeitenClasificacion de MaquinasJuan Francisco CHavez ViladegutNoch keine Bewertungen
- Memoria Descriptiva Agua PotableDokument25 SeitenMemoria Descriptiva Agua Potableantoniohc12Noch keine Bewertungen
- Trabajo Final Electricidad Industrial - Electricidad Basica - IiDokument7 SeitenTrabajo Final Electricidad Industrial - Electricidad Basica - IiElvis Enrique Llanque PerazaNoch keine Bewertungen
- Conductismo y CognitivismoDokument17 SeitenConductismo y CognitivismodagobertoNoch keine Bewertungen
- Un Viaje A Través de La NaturalezaDokument2 SeitenUn Viaje A Través de La NaturalezaAbraham Cruz HuamanNoch keine Bewertungen
- Examen Parcial de CultivosDokument2 SeitenExamen Parcial de CultivosKony MbgNoch keine Bewertungen
- Diseño Y Operación de Un Aero Refrigerador Adiabático: Alumno: Alejandro Pérez VerdúDokument126 SeitenDiseño Y Operación de Un Aero Refrigerador Adiabático: Alumno: Alejandro Pérez VerdúIng. Cecilia GutierrezNoch keine Bewertungen
- Guia Los PlanosDokument4 SeitenGuia Los PlanosYocceline Aparicio MoraNoch keine Bewertungen
- 2023 - Taller 2.1 PFD - DiseñoDokument1 Seite2023 - Taller 2.1 PFD - Diseñoadrian ospino canteroNoch keine Bewertungen
- (IPOO) ProyectoDokument4 Seiten(IPOO) Proyectojuan manuel urbano torresNoch keine Bewertungen
- Reglamento Transporte de CargaDokument3 SeitenReglamento Transporte de CargaC.L.ONoch keine Bewertungen
- Profesorado Segunda Enseñanza Pedagogía EspecialidadDokument1 SeiteProfesorado Segunda Enseñanza Pedagogía EspecialidadcomputadoraNoch keine Bewertungen
- Sesion Cadenas AlimenticiasDokument12 SeitenSesion Cadenas AlimenticiasBeybi María Ramírez TooresNoch keine Bewertungen
- Formato de Valorizacion en Obra AtrasadaDokument29 SeitenFormato de Valorizacion en Obra AtrasadaDiego Diaz MontoyaNoch keine Bewertungen
- Acumulación Por Desposesión David Harvey Concept - Pesquisa GoogleDokument2 SeitenAcumulación Por Desposesión David Harvey Concept - Pesquisa GooglecareNoch keine Bewertungen
- Vive Un Inicio Ganador en YanbalDokument1 SeiteVive Un Inicio Ganador en YanbalAmparo HuancaNoch keine Bewertungen
- Guia 4Dokument12 SeitenGuia 4XicoVascoZambranoNoch keine Bewertungen
- Matos CmagDokument106 SeitenMatos CmagGeraldine Ola De Mar FlorSaNoch keine Bewertungen
- El Uno para El Otro-Hernán CasciariDokument5 SeitenEl Uno para El Otro-Hernán CasciariJulioNoch keine Bewertungen
- MMT-SSO-PETS-021 PETS Cambio de Mantos Chancador Primario 0210-CRG-0001 - 002. Rev.01Dokument22 SeitenMMT-SSO-PETS-021 PETS Cambio de Mantos Chancador Primario 0210-CRG-0001 - 002. Rev.01essamcoordinacionNoch keine Bewertungen
- TP 641 2021-2 Trabajo PracticoDokument9 SeitenTP 641 2021-2 Trabajo PracticoLibia RodriguezNoch keine Bewertungen
- Modelo Design ThinkingDokument7 SeitenModelo Design ThinkingXochiltNoch keine Bewertungen
- GASOMETRÍA - para CombinarDokument12 SeitenGASOMETRÍA - para Combinarkotikokura15Noch keine Bewertungen
- Lab JACOBODokument12 SeitenLab JACOBOJacobo Silvestre Kiroshi0% (1)
- Areas de Las Principales Figuras Geometricas para Segundo de SecundariaDokument5 SeitenAreas de Las Principales Figuras Geometricas para Segundo de SecundariaAntonioNoch keine Bewertungen
- Servomotores Teoría APLICADO A La SewDokument99 SeitenServomotores Teoría APLICADO A La SewJose Requena100% (1)
- Caso Clínico Ii - Anatomía Funcional: Tania Hernández Agudelo Lency Camila Núñez Leyton Juliana Gil DuqueDokument18 SeitenCaso Clínico Ii - Anatomía Funcional: Tania Hernández Agudelo Lency Camila Núñez Leyton Juliana Gil DuqueTania HernandezNoch keine Bewertungen
- Maribel y La Extraña FamiliaDokument8 SeitenMaribel y La Extraña FamiliaPaloma GomisNoch keine Bewertungen
- Uso y Aprovechamiento de Los Desechos Organicos Parte 2Dokument14 SeitenUso y Aprovechamiento de Los Desechos Organicos Parte 2SPA 1 UNELLEZNoch keine Bewertungen
- 2 Armando Casos PracticosDokument7 Seiten2 Armando Casos PracticosHuache TiquicheoNoch keine Bewertungen
- Rubrica AnaliticaDokument2 SeitenRubrica Analiticaluisa fernanda p. cardonaNoch keine Bewertungen