Das könnte Ihnen auch gefallen
- Eia-Transmission Line-Costa Norte 0 PDFDokument595 SeitenEia-Transmission Line-Costa Norte 0 PDFLisette de la CruzNoch keine Bewertungen
- Fabricacion de PiezasDokument7 SeitenFabricacion de PiezasLisette de la CruzNoch keine Bewertungen
- Asignación 1 - TermodinámicaDokument1 SeiteAsignación 1 - TermodinámicaLisette de la CruzNoch keine Bewertungen
- Informe 1Dokument9 SeitenInforme 1Lisette de la CruzNoch keine Bewertungen
- Laboratorio 1Dokument2 SeitenLaboratorio 1Lisette de la CruzNoch keine Bewertungen
- Tipo y Orden de Juntas o Pares CinemáticosDokument3 SeitenTipo y Orden de Juntas o Pares CinemáticosLisette de la CruzNoch keine Bewertungen
- 2resistencias Equivalentes en Serie y Paralelo TEORICO.Dokument17 Seiten2resistencias Equivalentes en Serie y Paralelo TEORICO.Lisette de la CruzNoch keine Bewertungen
- 1la Seguridad y La Fuente de AlimentacionDokument10 Seiten1la Seguridad y La Fuente de AlimentacionLisette de la CruzNoch keine Bewertungen
- 1la Seguridad y La Fuente de AlimentacionDokument10 Seiten1la Seguridad y La Fuente de AlimentacionLisette de la CruzNoch keine Bewertungen
- Ensayo Perdida de Valores en VenezuelaDokument2 SeitenEnsayo Perdida de Valores en VenezuelaAnaNoch keine Bewertungen
- Registro Talleres Ciclos 6 - 2020Dokument18 SeitenRegistro Talleres Ciclos 6 - 2020JESUS JAVIER MERA ERASONoch keine Bewertungen
- El Problema de Definir El ArteDokument2 SeitenEl Problema de Definir El ArteMariela GsNoch keine Bewertungen
- Artículo UNLP ¿Qué Ves Cuando Me Ves'Dokument9 SeitenArtículo UNLP ¿Qué Ves Cuando Me Ves'Esi EnsecundariaNoch keine Bewertungen
- Urbanizacion MayaDokument12 SeitenUrbanizacion MayaGustavo Tejito GimenezNoch keine Bewertungen
- BetaDokument2 SeitenBetaJonathan Beltrán DNoch keine Bewertungen
- Biografia Abraham MaslowDokument2 SeitenBiografia Abraham MaslowStephany GallardoNoch keine Bewertungen
- Libro La Escuela de JacobDokument84 SeitenLibro La Escuela de Jacobrommer afanadorNoch keine Bewertungen
- Pruebas de Hipotesis Con SpssDokument31 SeitenPruebas de Hipotesis Con SpssjoseNoch keine Bewertungen
- Errores Comunes 3basico PDFDokument51 SeitenErrores Comunes 3basico PDFCyndy Chezzeranda Godínez NavarroNoch keine Bewertungen
- Horacio Quiroga - Ante El TribunalDokument2 SeitenHoracio Quiroga - Ante El Tribunalpalmer eldrichNoch keine Bewertungen
- Urbanismo Comercial Muy InteresanteDokument8 SeitenUrbanismo Comercial Muy Interesanteako267132Noch keine Bewertungen
- Silabo Psic Clin II 2019-1Dokument11 SeitenSilabo Psic Clin II 2019-1Leydi Xiomara Subia SalazarNoch keine Bewertungen
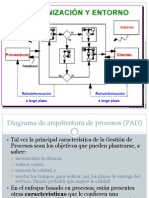
- Diagrama Pad RossDokument7 SeitenDiagrama Pad Rossrouse1009Noch keine Bewertungen
- 01 Componentes y Procedimientos GRDDokument12 Seiten01 Componentes y Procedimientos GRDJean Castro Alama100% (1)
- Fedro Plat N Selecci N 244a 250cDokument17 SeitenFedro Plat N Selecci N 244a 250cMitchelNoch keine Bewertungen
- Fotografia Del Existencialismo de SartreDokument3 SeitenFotografia Del Existencialismo de SartreCaritoRodriguezLukeNoch keine Bewertungen
- Ferrandiz Martin Culto A Maria LionzaDokument17 SeitenFerrandiz Martin Culto A Maria LionzalupaNoch keine Bewertungen
- Plan Historia 7° Agosto SeptDokument17 SeitenPlan Historia 7° Agosto SeptJuanaHerreraGarridoNoch keine Bewertungen
- Introducción A La BioeticaDokument10 SeitenIntroducción A La BioeticaSarai Garcia Cisneros.Noch keine Bewertungen
- La Rehumanización Del Taller de Arquitectura JcsandovalDokument10 SeitenLa Rehumanización Del Taller de Arquitectura JcsandovalJuan Carlos SandovalNoch keine Bewertungen
- QuarksDokument27 SeitenQuarksEdin FuentesNoch keine Bewertungen
- Taller I CB32Dokument8 SeitenTaller I CB32Leticia ArzolaNoch keine Bewertungen
- La Revolución de La Tecnología de La Información Indujo La Aparición Del InformacionalismoDokument4 SeitenLa Revolución de La Tecnología de La Información Indujo La Aparición Del InformacionalismoPaola LizarazoNoch keine Bewertungen
- Pensar Lo Contemporáneo: de La Cultura Situada A La Convergencia TecnológicaDokument27 SeitenPensar Lo Contemporáneo: de La Cultura Situada A La Convergencia TecnológicaComunicación SocialNoch keine Bewertungen
- Prospección GravimetricaDokument6 SeitenProspección GravimetricaJuanPablo Larico SaavedraNoch keine Bewertungen
- ETICA Caso EnronDokument1 SeiteETICA Caso EnronAlex Omar ArguetaNoch keine Bewertungen
- Cuadro de Doble EntradaDokument2 SeitenCuadro de Doble Entradajulio cesar narvaez antonio100% (1)
- ReflexionDokument1 SeiteReflexionArguiKunNoch keine Bewertungen
- Guía Instalaciones Domóticas ManualDokument19 SeitenGuía Instalaciones Domóticas ManualAntonio MartinezNoch keine Bewertungen