Das könnte Ihnen auch gefallen
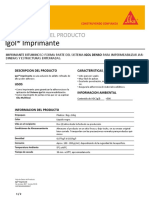
- Co-Ht - Igol ImprimanteDokument2 SeitenCo-Ht - Igol ImprimanteJohan GalloNoch keine Bewertungen
- Ejemplo de Briefs 2Dokument4 SeitenEjemplo de Briefs 2Johan GalloNoch keine Bewertungen
- Ejemplo de Briefs 1Dokument4 SeitenEjemplo de Briefs 1Johan GalloNoch keine Bewertungen
- BibliografíaDokument2 SeitenBibliografíaJohan GalloNoch keine Bewertungen
- Python para TodosDokument160 SeitenPython para TodosJunior Sumosa100% (2)
- Ejercicio Des Transferencia de CalorDokument2 SeitenEjercicio Des Transferencia de CalorJohan GalloNoch keine Bewertungen
- Matriz QFDDokument8 SeitenMatriz QFDJohan GalloNoch keine Bewertungen
- Taller Ecuaciones DiferencialesDokument6 SeitenTaller Ecuaciones DiferencialesJohan GalloNoch keine Bewertungen
- Preinforme EmisividadDokument3 SeitenPreinforme EmisividadJohan GalloNoch keine Bewertungen
- T4. ALTERNATIVAsDokument5 SeitenT4. ALTERNATIVAsJohan GalloNoch keine Bewertungen
- Trabajo Anova PDFDokument8 SeitenTrabajo Anova PDFJohan GalloNoch keine Bewertungen
- Trayec. Ortog. y OblicDokument2 SeitenTrayec. Ortog. y OblicBethlehem Keyla GiancoNoch keine Bewertungen
- T2. Planteamiento Problema, Justificación, ObjetivosDokument4 SeitenT2. Planteamiento Problema, Justificación, ObjetivosJohan GalloNoch keine Bewertungen
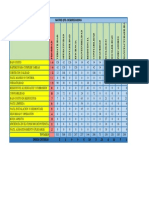
- T3 MATRIZqfd PDFDokument1 SeiteT3 MATRIZqfd PDFJohan GalloNoch keine Bewertungen
- Tuzta Si RespondeDokument2 SeitenTuzta Si RespondeJohan GalloNoch keine Bewertungen
- Teoría Sobre ExoesqueletosDokument17 SeitenTeoría Sobre ExoesqueletosJohan GalloNoch keine Bewertungen
- Lo FemeninoDokument7 SeitenLo FemeninoJohan GalloNoch keine Bewertungen
- Ejercicio Transferencia de CalorDokument2 SeitenEjercicio Transferencia de CalorJohan GalloNoch keine Bewertungen
- PLANTILA Entrevista EstudianteDokument3 SeitenPLANTILA Entrevista EstudianteJohan GalloNoch keine Bewertungen
- Trabajo AnovaDokument8 SeitenTrabajo AnovaJohan GalloNoch keine Bewertungen
- Trabajo Sistema de Acondicionamiento de Aire Con Enfriador EvaporativoDokument3 SeitenTrabajo Sistema de Acondicionamiento de Aire Con Enfriador EvaporativoJohan Gallo100% (1)
- TALLER 2 Prensa (Con Taraje)Dokument3 SeitenTALLER 2 Prensa (Con Taraje)Johan GalloNoch keine Bewertungen
- Proyecto: Sistema de Aire Acondicionado para Un Local Con Una Carga de 50W Usando Un Enfriador EvaporativoDokument17 SeitenProyecto: Sistema de Aire Acondicionado para Un Local Con Una Carga de 50W Usando Un Enfriador EvaporativoJohan GalloNoch keine Bewertungen
- T2. Planteamiento Problema, Justificación, ObjetivosDokument4 SeitenT2. Planteamiento Problema, Justificación, ObjetivosJohan GalloNoch keine Bewertungen
- T2. Planteamiento Problema, Justificación, ObjetivosDokument4 SeitenT2. Planteamiento Problema, Justificación, ObjetivosJohan GalloNoch keine Bewertungen
- Planteamiento Problema, Justificación, ObjetivosDokument4 SeitenPlanteamiento Problema, Justificación, ObjetivosJohan Gallo33% (3)
- Matriz de CalidadDokument1 SeiteMatriz de CalidadJohan GalloNoch keine Bewertungen
- ViscosidadDokument3 SeitenViscosidadJohan GalloNoch keine Bewertungen
- T2. Planteamiento Problema, Justificación, ObjetivosDokument4 SeitenT2. Planteamiento Problema, Justificación, ObjetivosJohan GalloNoch keine Bewertungen
- Proyecto Integrador 2 Calentamiento GlobalDokument4 SeitenProyecto Integrador 2 Calentamiento GlobalceciliaNoch keine Bewertungen
- Dossier 3004Dokument28 SeitenDossier 3004Willy MoralesNoch keine Bewertungen
- Peste y Leptospirosis FinalDokument23 SeitenPeste y Leptospirosis FinalChristian Castro SanchezNoch keine Bewertungen
- Bacterias Beneficiadas en La LecheDokument3 SeitenBacterias Beneficiadas en La LecheEvelyn Brolrzovich ZuloetaNoch keine Bewertungen
- Sigmund Freud Vida y Obra Del Célebre PsicoanalistaDokument6 SeitenSigmund Freud Vida y Obra Del Célebre Psicoanalistalobito2018Noch keine Bewertungen
- Sesion 02Dokument55 SeitenSesion 02David G. MirandaNoch keine Bewertungen
- Armado Del EsqueletetoDokument7 SeitenArmado Del EsqueletetoKaled LandivarNoch keine Bewertungen
- Taller de Acompañamiento para Aprendices Beneficiarios Del Área de Apoyos SocioeconómicosDokument5 SeitenTaller de Acompañamiento para Aprendices Beneficiarios Del Área de Apoyos Socioeconómicosangie peña barreraNoch keine Bewertungen
- 7 - ColumnaDokument13 Seiten7 - ColumnaAgustín SequeiraNoch keine Bewertungen
- Clase 1 Ecología y ConceptosDokument75 SeitenClase 1 Ecología y ConceptosMaria Jose AsenjoNoch keine Bewertungen
- TR - Montaje y Mantenimiento de Líneas de Alimentación en Electrificación FerroviariaDokument30 SeitenTR - Montaje y Mantenimiento de Líneas de Alimentación en Electrificación FerroviariaEDWIN MARTINNoch keine Bewertungen
- Luxaciones, Fracturas y FerulasDokument21 SeitenLuxaciones, Fracturas y FerulasJanella Alvarez FloresNoch keine Bewertungen
- Bioseguridad en Laboratorio de ToxicologiaDokument30 SeitenBioseguridad en Laboratorio de Toxicologiajhexmy63% (8)
- Quequedenavidad 201317 Dic 2013Dokument2 SeitenQuequedenavidad 201317 Dic 2013magikaesNoch keine Bewertungen
- Pinedo Arevalo Miguel Muros Suelo ReforzadoDokument106 SeitenPinedo Arevalo Miguel Muros Suelo ReforzadoHebert Rodríguez SantiagoNoch keine Bewertungen
- L Ngua Aterna Español: ¿Qué Tipo de Relaciones Hay Entre Los Personajes de Un Cuento?Dokument8 SeitenL Ngua Aterna Español: ¿Qué Tipo de Relaciones Hay Entre Los Personajes de Un Cuento?MPB TM 5BNoch keine Bewertungen
- Informe EMPRENDIMIENTODokument10 SeitenInforme EMPRENDIMIENTOEstuardo PerézNoch keine Bewertungen
- Capitulo IVDokument34 SeitenCapitulo IVFREDDY INTI LAURANoch keine Bewertungen
- Guia QuimicaDokument13 SeitenGuia QuimicaAngel Jacob Cabrera MartínezNoch keine Bewertungen
- Envejecimiento Orgánico y PerceptivoDokument14 SeitenEnvejecimiento Orgánico y Perceptivomaruqiitag100% (2)
- Etapas de La ProduccionDokument4 SeitenEtapas de La ProduccionFlor GuerreroNoch keine Bewertungen
- Plan de Desarrollo Comunal UsiacuriDokument16 SeitenPlan de Desarrollo Comunal UsiacuriLinna EscorciaNoch keine Bewertungen
- Planificacion Geografía 4to Año Computacion 2023Dokument3 SeitenPlanificacion Geografía 4to Año Computacion 2023Federico Gonzalo CaviedesNoch keine Bewertungen
- COVID-19: en Las NoticiasDokument13 SeitenCOVID-19: en Las NoticiasAlejandra MososNoch keine Bewertungen
- Electrotecnia GeneralDokument3 SeitenElectrotecnia GeneralFranco MendozaNoch keine Bewertungen
- Miguel HernandezDokument20 SeitenMiguel HernandezLUISANoch keine Bewertungen
- Data CenterDokument12 SeitenData CenterAbner Guillermo Corrales CortesNoch keine Bewertungen
- Tipos de TransformadoresDokument9 SeitenTipos de TransformadoresGerardo Daniel Ortiz CruzNoch keine Bewertungen
- Alteraciones Post-Mortem, Necropsia y MuestrasDokument16 SeitenAlteraciones Post-Mortem, Necropsia y MuestrasDaniela BañosNoch keine Bewertungen