Das könnte Ihnen auch gefallen
- Ejercicios de Controladores Pid y de Respuesta en FrecuenciaDokument4 SeitenEjercicios de Controladores Pid y de Respuesta en FrecuenciaKelly Diana RojasNoch keine Bewertungen
- Ajuste, puesta en marcha y regulación de los sistemas mecánicos. FMEE0208Von EverandAjuste, puesta en marcha y regulación de los sistemas mecánicos. FMEE0208Bewertung: 4 von 5 Sternen4/5 (1)
- Cuadro ComparativoDokument4 SeitenCuadro Comparativofabian sanchez vasquezNoch keine Bewertungen
- Práctica PID DiscretoDokument12 SeitenPráctica PID DiscretoAMAURY BRANDON VLADIMIR GUEVARA ROJASNoch keine Bewertungen
- Cubo Led 3x3x3 PIC16f628aDokument3 SeitenCubo Led 3x3x3 PIC16f628aVlade RamirezNoch keine Bewertungen
- Señales y Sistemas - Matlab Ejercicios DidácticosDokument23 SeitenSeñales y Sistemas - Matlab Ejercicios DidácticosLuis GalvezNoch keine Bewertungen
- RobotDokument5 SeitenRobotsupconNoch keine Bewertungen
- Ejercicios Resueltos de Radiopropagacion y AntenasDokument5 SeitenEjercicios Resueltos de Radiopropagacion y AntenasCärlos Månuel Seguil SolânoNoch keine Bewertungen
- Laboratorio 4Dokument5 SeitenLaboratorio 4Santiago Cepeda Gomez100% (1)
- Tableros Monofásicos y Trifásicos David Palavecino para RokerDokument33 SeitenTableros Monofásicos y Trifásicos David Palavecino para RokerGabriel FaríasNoch keine Bewertungen
- Practica 1Dokument6 SeitenPractica 1Adrian Manuel Lopez AlmejoNoch keine Bewertungen
- Conectores de PCDokument9 SeitenConectores de PCscatmaNoch keine Bewertungen
- Clase 1 PAC TEORIADokument37 SeitenClase 1 PAC TEORIAElita Fernandez YuyarimaNoch keine Bewertungen
- Codificador de Clave MorseDokument16 SeitenCodificador de Clave Morsesebastian ruizNoch keine Bewertungen
- Dsp-Estimación de Tiempo de RetardoDokument4 SeitenDsp-Estimación de Tiempo de RetardoxxxlepexxxNoch keine Bewertungen
- Manual de Matemática II (1813)Dokument80 SeitenManual de Matemática II (1813)fray yuri quispe loayzaNoch keine Bewertungen
- Informe 1Dokument6 SeitenInforme 1Ricardo FloresNoch keine Bewertungen
- DMADokument20 SeitenDMAMiguel Angel Flores BañosNoch keine Bewertungen
- Tendencia CentralDokument3 SeitenTendencia CentralDaniela93mNoch keine Bewertungen
- Control AutomáticoDokument14 SeitenControl AutomáticoGisela RoblesNoch keine Bewertungen
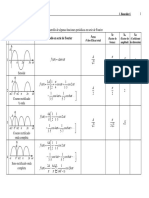
- 05 Tabla-SerieFourier-2011Dokument5 Seiten05 Tabla-SerieFourier-2011EIEENoch keine Bewertungen
- Contador de Monedas MatlabDokument2 SeitenContador de Monedas MatlabRandy Fabiany Montañez0% (1)
- Probabilidad de Error y Tasa de Error de BitDokument7 SeitenProbabilidad de Error y Tasa de Error de BitrobertoNoch keine Bewertungen
- Teoria de Controles Atoma7-13 PDFDokument46 SeitenTeoria de Controles Atoma7-13 PDFGuillermo CondoriNoch keine Bewertungen
- Labo 2 Tele IiDokument29 SeitenLabo 2 Tele IiCarlos MoreNoch keine Bewertungen
- Cuadernillo de Ejercicios U1Dokument11 SeitenCuadernillo de Ejercicios U1Admon HpNoch keine Bewertungen
- Leccion 8 Modelado DinamicoDokument111 SeitenLeccion 8 Modelado DinamicoErika Tatiana IzaNoch keine Bewertungen
- Rectificador Trifasico Semicontrolado PDFDokument179 SeitenRectificador Trifasico Semicontrolado PDFalex RenderosNoch keine Bewertungen
- Practica 9 Completa PDFDokument22 SeitenPractica 9 Completa PDFManuel De Jesus ValenzuelaNoch keine Bewertungen
- Rectificador Trifasico Onda CompletaDokument65 SeitenRectificador Trifasico Onda CompletaJohan Silva CuevaNoch keine Bewertungen
- Taller Secci On 13.9: Aplicaci On de Los Extremos de FuncionesDokument5 SeitenTaller Secci On 13.9: Aplicaci On de Los Extremos de FuncionesNelson RobayoNoch keine Bewertungen
- Calculo de Transformador de Baja PotenciaDokument5 SeitenCalculo de Transformador de Baja Potencialifernost12Noch keine Bewertungen
- L09 FpgaDokument11 SeitenL09 FpgavvvvNoch keine Bewertungen
- Práctica 6 TermocuplaDokument11 SeitenPráctica 6 TermocuplaFreddy Tamayo0% (1)
- Ejemplos de Ecuaciones de Estado Con Circuitos EléctricosDokument9 SeitenEjemplos de Ecuaciones de Estado Con Circuitos Eléctricosluisa fernanda romero lozanoNoch keine Bewertungen
- Problemas/Problemas de Diodos y RectificacionDokument8 SeitenProblemas/Problemas de Diodos y RectificacionMariano Suárez GuerreroNoch keine Bewertungen
- Variador de Velocidad VHDLDokument6 SeitenVariador de Velocidad VHDLAngie Lorena Espinosa RozoNoch keine Bewertungen
- Lab 13Dokument20 SeitenLab 13Yerdrick Jhosep Tunco CuentaNoch keine Bewertungen
- Digitales FinalDokument6 SeitenDigitales FinalDaniela MartinezNoch keine Bewertungen
- Practica de Procesamiento DigitalDokument20 SeitenPractica de Procesamiento DigitalarmminblackNoch keine Bewertungen
- Practica 2 ConvolucionDokument1 SeitePractica 2 ConvolucionJulio CashNoch keine Bewertungen
- Laboratorio 7 AlternaDokument4 SeitenLaboratorio 7 AlternaJeferson CañasNoch keine Bewertungen
- Automas FinitosDokument22 SeitenAutomas FinitosinggafabifiNoch keine Bewertungen
- Laboratorio Dynamixel PDFDokument5 SeitenLaboratorio Dynamixel PDFluis quitianNoch keine Bewertungen
- Taller 1Dokument4 SeitenTaller 1Laura Sofia Dueñas BullaNoch keine Bewertungen
- Diagramas de Bode en MatlabDokument2 SeitenDiagramas de Bode en MatlabLuis MedinaNoch keine Bewertungen
- 1 Practicas en Neumatica KMP Ev PDFDokument142 Seiten1 Practicas en Neumatica KMP Ev PDFNacho Castro IzquierdoNoch keine Bewertungen
- Ejemplo de Compensacion Con MatlabDokument9 SeitenEjemplo de Compensacion Con Matlabaza-elNoch keine Bewertungen
- Informe 5Dokument6 SeitenInforme 5HECTOR BAYRON PAREDES CAJAMARCANoch keine Bewertungen
- Metodos Numericos EnsambladorDokument13 SeitenMetodos Numericos EnsambladorGustavo LimaNoch keine Bewertungen
- Practica 8Dokument4 SeitenPractica 8Steven Mago MayorgaNoch keine Bewertungen
- Informe Práctica 5 - Circuitos BalanceadosDokument22 SeitenInforme Práctica 5 - Circuitos BalanceadosMayraNoch keine Bewertungen
- Comunicación de Dos PLC Por: EthernetDokument22 SeitenComunicación de Dos PLC Por: EthernetErick RomeroNoch keine Bewertungen
- Lab N°4 - CPBMDokument10 SeitenLab N°4 - CPBMcristhianNoch keine Bewertungen
- Lab S3 RNADokument2 SeitenLab S3 RNAluquitas214Noch keine Bewertungen
- 3332 S Tecnología de Automatización Con Siemens PLCDokument123 Seiten3332 S Tecnología de Automatización Con Siemens PLCOmar Curo PariNoch keine Bewertungen
- Laboratorio - Analisis de Circuitos Practica 1Dokument5 SeitenLaboratorio - Analisis de Circuitos Practica 1Nicholas DavisNoch keine Bewertungen
- 3.2 Sintonizaciòn de ControladoresDokument19 Seiten3.2 Sintonizaciòn de ControladoresAlma Crystell Gómez MontejoNoch keine Bewertungen
- Criterios de SintonizacionDokument8 SeitenCriterios de SintonizacionFernanda MorenoNoch keine Bewertungen
- Checklist Inspeccion de Equipo y MaquinaDokument1 SeiteChecklist Inspeccion de Equipo y MaquinaKarlaNoch keine Bewertungen
- Necesidades MetricasDokument3 SeitenNecesidades MetricasKarlaNoch keine Bewertungen
- Metodologia Marco Logico Caso 2Dokument10 SeitenMetodologia Marco Logico Caso 2KarlaNoch keine Bewertungen
- Apreciación A La EsculturaDokument6 SeitenApreciación A La EsculturaKarlaNoch keine Bewertungen
- Criterios de Selección de ComponentesDokument8 SeitenCriterios de Selección de ComponentesKarlaNoch keine Bewertungen
- UBIDOTDokument11 SeitenUBIDOTKarla100% (1)
- Practica 3Dokument25 SeitenPractica 3KarlaNoch keine Bewertungen
- Informe SumadorDokument12 SeitenInforme SumadorKarlaNoch keine Bewertungen
- Ciencia y HumanismoDokument610 SeitenCiencia y HumanismoLuz Adriana SuárezNoch keine Bewertungen
- Z - Programa-Historia y Filosofía de La MatemáticaDokument4 SeitenZ - Programa-Historia y Filosofía de La MatemáticaCarlos HerreraNoch keine Bewertungen
- Experiencia de Aprendizaje N º 08Dokument13 SeitenExperiencia de Aprendizaje N º 08rosario vivesNoch keine Bewertungen
- Taller de Estadística Descriptiva.Dokument12 SeitenTaller de Estadística Descriptiva.ANDREA CAROLINA NOGUERA TOVARNoch keine Bewertungen
- Viabilidad Del Curriculo (LGO2008)Dokument17 SeitenViabilidad Del Curriculo (LGO2008)Marcela Poblete PérezNoch keine Bewertungen
- Guía CENEVAL EXANI-II 2018 Contestada Módulo Ciencias Administrativas.Dokument5 SeitenGuía CENEVAL EXANI-II 2018 Contestada Módulo Ciencias Administrativas.Victor Hugo Rubio DuarteNoch keine Bewertungen
- Problemario Unidad 3 Cálculo IntegralDokument1 SeiteProblemario Unidad 3 Cálculo IntegralBus TopNoch keine Bewertungen
- EstadOFE - POD - WebDokument5 SeitenEstadOFE - POD - WebMaroua SlimaniNoch keine Bewertungen
- GeometriaAnalitica2015 PDFDokument13 SeitenGeometriaAnalitica2015 PDFfatima arellanoNoch keine Bewertungen
- Presentacion Clases V 2Dokument371 SeitenPresentacion Clases V 2Henry CalleNoch keine Bewertungen
- Devuelvanmeamiperro JirafonjirafinaDokument16 SeitenDevuelvanmeamiperro JirafonjirafinaDn LeNoch keine Bewertungen
- FractalesDokument2 SeitenFractalesJuan Sebastián GiraldoNoch keine Bewertungen
- Aplicaciones de La DerivadaDokument18 SeitenAplicaciones de La DerivadaLarissa Aburto NahìnNoch keine Bewertungen
- Distribucion Log-Normal de 2 ParametrosDokument6 SeitenDistribucion Log-Normal de 2 ParametrosJulio Cesar Panihuara Jara100% (1)
- Actividad 5 - Matriz Insumo-ConsumoDokument5 SeitenActividad 5 - Matriz Insumo-ConsumoDaniel SalgadoNoch keine Bewertungen
- Unidad 7. Aplicaciones Método Máxima Verosimilitud PDFDokument15 SeitenUnidad 7. Aplicaciones Método Máxima Verosimilitud PDFMartí Berenguer MimóNoch keine Bewertungen
- Trabajo de CuerposDokument14 SeitenTrabajo de CuerposMarbin Jonathan Rondoy GodosNoch keine Bewertungen
- Ubicacion Programatica 2Dokument6 SeitenUbicacion Programatica 2Itzel LaraNoch keine Bewertungen
- Solucionario UNI 2013-I MatemáticaDokument22 SeitenSolucionario UNI 2013-I MatemáticaGlenn Robert Revolledo Vilchez100% (2)
- Proyecto Estudiantil de Polígonos RegularesDokument7 SeitenProyecto Estudiantil de Polígonos RegularesErik LlanoNoch keine Bewertungen
- Ejercicios Con ClaveDokument5 SeitenEjercicios Con Clavecarlos ramos buendiaNoch keine Bewertungen
- Leonhard EulerDokument14 SeitenLeonhard EulerPedro Ballena Cardenas100% (1)
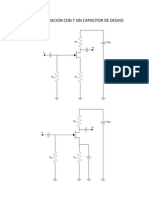
- Autopolarizacion Con y Sin Capacitor de DesvioDokument13 SeitenAutopolarizacion Con y Sin Capacitor de DesvioLuis AcevedoNoch keine Bewertungen
- Folleto Ec. Dif. Roberto Cabrera PDFDokument157 SeitenFolleto Ec. Dif. Roberto Cabrera PDFMcGrey Hill100% (1)
- Operaciones Con RacionalesDokument26 SeitenOperaciones Con RacionalesLorena CollazosNoch keine Bewertungen
- Facilitaciones 1-4, OnlineDokument3 SeitenFacilitaciones 1-4, OnlineSuhailNoch keine Bewertungen
- Actividad 14Dokument7 SeitenActividad 14José Jhonny Sánchez SolísNoch keine Bewertungen
- Calculo de Una Area en TopografiaDokument29 SeitenCalculo de Una Area en TopografiaRicardo Pereira Romero0% (2)
- La Trigonometria en La Vida CotidianaDokument2 SeitenLa Trigonometria en La Vida CotidianaMontse Buaki Sogó100% (2)