Das könnte Ihnen auch gefallen
- New Approaches to Image Processing based Failure Analysis of Nano-Scale ULSI DevicesVon EverandNew Approaches to Image Processing based Failure Analysis of Nano-Scale ULSI DevicesBewertung: 5 von 5 Sternen5/5 (1)
- Industrial X-Ray Computed TomographyVon EverandIndustrial X-Ray Computed TomographySimone CarmignatoNoch keine Bewertungen
- Edge Detection For Face Image Using Multiple FiltersDokument14 SeitenEdge Detection For Face Image Using Multiple Filterseditor ijeratNoch keine Bewertungen
- Survey On Image Processing in The Field of De-Noising Techniques and Edge Detection Techniques On Radiographic ImagesDokument9 SeitenSurvey On Image Processing in The Field of De-Noising Techniques and Edge Detection Techniques On Radiographic ImagesNguyen Tuong ThanhNoch keine Bewertungen
- Seminar Report Edge DetectionDokument20 SeitenSeminar Report Edge DetectionNikhil JoyNoch keine Bewertungen
- Shadow Detection Removal Colour ImagesDokument5 SeitenShadow Detection Removal Colour ImagesdestawNoch keine Bewertungen
- Denoising Techniques For Synthetic Aperture Radar Data - A ReviewDokument11 SeitenDenoising Techniques For Synthetic Aperture Radar Data - A ReviewIAEME PublicationNoch keine Bewertungen
- Edge Detection-Application of (First and Second) Order Derivative in Image ProcessingDokument11 SeitenEdge Detection-Application of (First and Second) Order Derivative in Image ProcessingBhuviNoch keine Bewertungen
- FPGA Based Design and Implementation of Image Edge Detection Using Xilinx System GeneratorDokument4 SeitenFPGA Based Design and Implementation of Image Edge Detection Using Xilinx System GeneratorseventhsensegroupNoch keine Bewertungen
- Edge Detection PDFDokument12 SeitenEdge Detection PDFchaithra580Noch keine Bewertungen
- Improved Color Edge Detection by Fusion of Hue, PCA & Hybrid CannyDokument8 SeitenImproved Color Edge Detection by Fusion of Hue, PCA & Hybrid CannyVijayakumarNoch keine Bewertungen
- An Edge Detection Algorithm Based On Fuzzy LogicDokument5 SeitenAn Edge Detection Algorithm Based On Fuzzy LogicseventhsensegroupNoch keine Bewertungen
- Review On Distributed Canny Edge Detectorusing FpgaDokument8 SeitenReview On Distributed Canny Edge Detectorusing FpgaSimrandeep SinghNoch keine Bewertungen
- Dynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsDokument5 SeitenDynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsijsretNoch keine Bewertungen
- A Comparative Analysis On Image Denoising Using Different Median Filter MethodsDokument9 SeitenA Comparative Analysis On Image Denoising Using Different Median Filter MethodsIJRASETPublicationsNoch keine Bewertungen
- Image Segmentation by Using Edge DetectionDokument5 SeitenImage Segmentation by Using Edge DetectionArivazhagan ArtNoch keine Bewertungen
- VLSI Implementation of Impulse Noise Suppression in ImagesDokument6 SeitenVLSI Implementation of Impulse Noise Suppression in ImagesInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Ijetae 0112 51Dokument3 SeitenIjetae 0112 51ppat2006Noch keine Bewertungen
- Acoustic Echo Cancellation With Adaptive Filtering Using Texas Instrument DSK6713Dokument11 SeitenAcoustic Echo Cancellation With Adaptive Filtering Using Texas Instrument DSK6713IJRASETPublicationsNoch keine Bewertungen
- Wavelet Based Face Recognition SystemDokument4 SeitenWavelet Based Face Recognition SystemrednivsajNoch keine Bewertungen
- Ijettcs 2014 10 14 66 PDFDokument4 SeitenIjettcs 2014 10 14 66 PDFInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Denoising and Edge Detection Using SobelmethodDokument6 SeitenDenoising and Edge Detection Using SobelmethodIJMERNoch keine Bewertungen
- Multipass Bilateral Filter - CartoonizerDokument18 SeitenMultipass Bilateral Filter - CartoonizerNikhil Wakalkar100% (1)
- Major Project Report 4th Year IT EDGE DETECTION FinalDokument51 SeitenMajor Project Report 4th Year IT EDGE DETECTION FinalAnish Prasad86% (7)
- Comparison of Edge Detectors: Ayaz Akram, Asad IsmailDokument9 SeitenComparison of Edge Detectors: Ayaz Akram, Asad IsmailRamSharmaNoch keine Bewertungen
- A Fast Image Sharpness Algorithm ImplementationDokument6 SeitenA Fast Image Sharpness Algorithm ImplementationijosatNoch keine Bewertungen
- Image Processing by Digital Filter Using MatlabDokument7 SeitenImage Processing by Digital Filter Using MatlabInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- International Journal of Computational Engineering Research (IJCER)Dokument4 SeitenInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)Noch keine Bewertungen
- Seminar IeeeDokument6 SeitenSeminar IeeenikhiNoch keine Bewertungen
- Simplified Novel Method For Edge Detection in Digital ImagesDokument6 SeitenSimplified Novel Method For Edge Detection in Digital ImagesBasanagouda NavadagiNoch keine Bewertungen
- Rakesh Kumar Kardam: - Filter H (T) Y (T) S (T) +N (T)Dokument6 SeitenRakesh Kumar Kardam: - Filter H (T) Y (T) S (T) +N (T)Deepak SankhalaNoch keine Bewertungen
- Sensors 18 02530Dokument14 SeitenSensors 18 02530JORGE ANDRES YARASCA HUANACUNENoch keine Bewertungen
- An Improved Edge Detection in SAR Color ImagesDokument5 SeitenAn Improved Edge Detection in SAR Color ImagesInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- PXC 387549Dokument8 SeitenPXC 387549Adisti Nuraprilia prasastiNoch keine Bewertungen
- Vertical Lane Line Detection Technology Based On Hough TransformDokument7 SeitenVertical Lane Line Detection Technology Based On Hough Transformpepethefrogg45Noch keine Bewertungen
- 08 FIR Filter For Speckle Noise RejectionDokument59 Seiten08 FIR Filter For Speckle Noise RejectionSampath ReddyNoch keine Bewertungen
- Adaptive Image Enehnacement of Echocardiographic Images Using Automatic RoiDokument7 SeitenAdaptive Image Enehnacement of Echocardiographic Images Using Automatic RoiInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Sonar Image Processing For Underwater Object Detection Based On High Resolution System PDFDokument6 SeitenSonar Image Processing For Underwater Object Detection Based On High Resolution System PDFSrikanth VasamsettiNoch keine Bewertungen
- Image Enhancement Using Crossbreed Wavelet Neighbour MethodDokument4 SeitenImage Enhancement Using Crossbreed Wavelet Neighbour MethodInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Implementation of Medical Image Fusion Using DWT Process On FPGADokument4 SeitenImplementation of Medical Image Fusion Using DWT Process On FPGAATSNoch keine Bewertungen
- International Journal of Image Processing (IJIP)Dokument65 SeitenInternational Journal of Image Processing (IJIP)AI Coordinator - CSC JournalsNoch keine Bewertungen
- 3D Map-Building From RGB-D Data Considering Noise Characteristics of KinectDokument6 Seiten3D Map-Building From RGB-D Data Considering Noise Characteristics of KinectPsycosiado DivertidoNoch keine Bewertungen
- Paper 3Dokument11 SeitenPaper 3irjmssNoch keine Bewertungen
- Remotesensing 12 01432 v2Dokument25 SeitenRemotesensing 12 01432 v2thesurajzawareNoch keine Bewertungen
- Ijcet 06 10 001Dokument12 SeitenIjcet 06 10 001IAEME PublicationNoch keine Bewertungen
- Jurnal Teknologi: P W M I F Fpga H L L CDokument5 SeitenJurnal Teknologi: P W M I F Fpga H L L CBalaji VenkataramanNoch keine Bewertungen
- Edge Detectors: Deptofcs& EDokument26 SeitenEdge Detectors: Deptofcs& Eishant7890Noch keine Bewertungen
- Image Denoising With Contourlet TransformDokument6 SeitenImage Denoising With Contourlet TransformIJRASETPublicationsNoch keine Bewertungen
- Study and Comparison of Various Image EdDokument12 SeitenStudy and Comparison of Various Image EdSharmin SathiNoch keine Bewertungen
- Development of Emittance Analysis Software ForDokument5 SeitenDevelopment of Emittance Analysis Software FormarianojpNoch keine Bewertungen
- SAFARILAB: A Rugged and Reliable Optical Imaging System Characterization Set-Up For Industrial EnvironmentDokument15 SeitenSAFARILAB: A Rugged and Reliable Optical Imaging System Characterization Set-Up For Industrial EnvironmentBoonsap WitchayangkoonNoch keine Bewertungen
- University of Zawia Faculty of Engineering: Performance of Different Transforms On Image ContourDokument51 SeitenUniversity of Zawia Faculty of Engineering: Performance of Different Transforms On Image ContourAhmed HwaidiNoch keine Bewertungen
- Ijecet 13 02 002Dokument15 SeitenIjecet 13 02 002IAEME PublicationNoch keine Bewertungen
- Design and Simulation of Range Estimation in Residential Building Using IEEE 802.11b WLAN NetworksDokument5 SeitenDesign and Simulation of Range Estimation in Residential Building Using IEEE 802.11b WLAN NetworkstheijesNoch keine Bewertungen
- Design and Implementation of Acoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDokument9 SeitenDesign and Implementation of Acoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDawitNoch keine Bewertungen
- Acoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDokument9 SeitenAcoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDawitNoch keine Bewertungen
- Brain Tumor Extraction From MRI Images Using Matlab: A State ArtDokument4 SeitenBrain Tumor Extraction From MRI Images Using Matlab: A State ArtCristian Marq'zNoch keine Bewertungen
- Lab Based Project ReportDokument40 SeitenLab Based Project ReportNagulmeera ShaikNoch keine Bewertungen
- Tone Mapping: Tone Mapping: Illuminating Perspectives in Computer VisionVon EverandTone Mapping: Tone Mapping: Illuminating Perspectives in Computer VisionNoch keine Bewertungen
- Canny Edge Detector: Unveiling the Art of Visual PerceptionVon EverandCanny Edge Detector: Unveiling the Art of Visual PerceptionNoch keine Bewertungen
- Communalism and Its Impact (Shashidthakur23.wordpress - Com) PDFDokument12 SeitenCommunalism and Its Impact (Shashidthakur23.wordpress - Com) PDFajay kumar sainiNoch keine Bewertungen
- Gs 1Dokument2 SeitenGs 1ajay kumar sainiNoch keine Bewertungen
- Gs 1Dokument2 SeitenGs 1ajay kumar sainiNoch keine Bewertungen
- CH 05 PDFDokument17 SeitenCH 05 PDFDrRaanu SharmaNoch keine Bewertungen
- Yojanas - ConsolidatedDokument31 SeitenYojanas - ConsolidatedSiva JothiNoch keine Bewertungen
- 173d4860 Quasi Judicial Bodies in IndiaDokument9 Seiten173d4860 Quasi Judicial Bodies in Indiakrisco5287Noch keine Bewertungen
- (Vision - Ias) Separation - Of.powersDokument11 Seiten(Vision - Ias) Separation - Of.powerscompete_with_self50% (4)
- Inclusive GrowthDokument20 SeitenInclusive GrowthCecil ThompsonNoch keine Bewertungen
- Agriculture Marketing - Transportation - TechnologyDokument29 SeitenAgriculture Marketing - Transportation - Technologyajay kumar sainiNoch keine Bewertungen
- Disaster Management WWW - Visionias.inDokument20 SeitenDisaster Management WWW - Visionias.inAbhishek GuptaNoch keine Bewertungen
- Sardar Vallabbhai PatelDokument35 SeitenSardar Vallabbhai Patelajay kumar sainiNoch keine Bewertungen
- Sites Default Files Documents Welfare Schemes G.S. M 2013 WWW - Visionias.inDokument19 SeitenSites Default Files Documents Welfare Schemes G.S. M 2013 WWW - Visionias.inपरमानन्दगुप्ता'भारत'Noch keine Bewertungen
- 1833f797 Governance Polity WWW - Visionias.inDokument0 Seiten1833f797 Governance Polity WWW - Visionias.inruchiawasthyNoch keine Bewertungen
- 2011 CSAT Prelims Paper (Shashidthakur23.Wordpress - Com)Dokument17 Seiten2011 CSAT Prelims Paper (Shashidthakur23.Wordpress - Com)Anonymous utfuIcnNoch keine Bewertungen
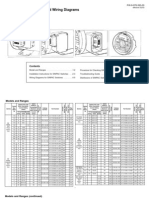
- Installation Instructions and Wiring Diagrams For All Models and RangesDokument8 SeitenInstallation Instructions and Wiring Diagrams For All Models and RangesMaria MusyNoch keine Bewertungen
- LCD Monitor User Manual: LED BacklightDokument31 SeitenLCD Monitor User Manual: LED Backlighta4558305Noch keine Bewertungen
- Introduction About VFDDokument3 SeitenIntroduction About VFDHuzaifa WasimNoch keine Bewertungen
- DMD Getting StartedDokument2 SeitenDMD Getting StartedGanjanGNoch keine Bewertungen
- 04 HPGP Introduction MStarDokument25 Seiten04 HPGP Introduction MStargrasspackingNoch keine Bewertungen
- 3TL Siemens PDFDokument50 Seiten3TL Siemens PDFPedro Martins100% (1)
- Exercise:: Logic Gates - General Questions: Logic Gates - True or False Logic Gates - Filling The BlanksDokument26 SeitenExercise:: Logic Gates - General Questions: Logic Gates - True or False Logic Gates - Filling The BlanksSKYE LightsNoch keine Bewertungen
- Recloser-Fuse Coordination of Radial Distribution Systems in Presence of DG: Analysis, Simulation Studies, & An Adaptive Relaying SchemeDokument31 SeitenRecloser-Fuse Coordination of Radial Distribution Systems in Presence of DG: Analysis, Simulation Studies, & An Adaptive Relaying SchemeAndres L MencoNoch keine Bewertungen
- Digital ElectronicsDokument20 SeitenDigital Electronics1balamanianNoch keine Bewertungen
- 2008-06-04 124629 Corolla Tsib 5Dokument3 Seiten2008-06-04 124629 Corolla Tsib 5nuwan_nisha100% (2)
- User's Guide: Group G Controller For Automatic & Non-Automatic Transfer SwitchesDokument40 SeitenUser's Guide: Group G Controller For Automatic & Non-Automatic Transfer Switchesangel aguilarNoch keine Bewertungen
- ML Maximum Power Point Tracking (MPPT) Series Ml4860: User ManualDokument13 SeitenML Maximum Power Point Tracking (MPPT) Series Ml4860: User ManualReymark EmbateNoch keine Bewertungen
- Auto Trans Diagnosis - Aw03-72Le Article TextDokument15 SeitenAuto Trans Diagnosis - Aw03-72Le Article TextCarlos Andres Campos TorresNoch keine Bewertungen
- Wein Bridge Oscillators PresentationDokument15 SeitenWein Bridge Oscillators PresentationHarish KumarNoch keine Bewertungen
- Ant Amb452000 1502 Datasheet PDFDokument2 SeitenAnt Amb452000 1502 Datasheet PDFIwan Arinta100% (1)
- EL5000 Hardware IntroductionDokument39 SeitenEL5000 Hardware Introductionapi-3855014Noch keine Bewertungen
- TCC Number 165-6Dokument1 SeiteTCC Number 165-6Alvaro Solis VegaNoch keine Bewertungen
- 88° Panel Antenna: General SpecificationsDokument2 Seiten88° Panel Antenna: General SpecificationsDuke QuaresmaNoch keine Bewertungen
- Chapter 22 - Principles of Electronic Communication Systems - FrenzelDokument110 SeitenChapter 22 - Principles of Electronic Communication Systems - FrenzelDrex GarciaNoch keine Bewertungen
- Implementation of AES Algorithm in UART Module For Secured Data TransferDokument1 SeiteImplementation of AES Algorithm in UART Module For Secured Data Transferblesson123Noch keine Bewertungen
- Electricity System For HospitalsDokument14 SeitenElectricity System For HospitalsTejinderNoch keine Bewertungen
- AP-105 Wireless Access Point: Installation GuideDokument2 SeitenAP-105 Wireless Access Point: Installation GuideKalan KlNoch keine Bewertungen
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Dokument35 SeitenInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Eduardo SantanaNoch keine Bewertungen
- Line Follower RobotDokument10 SeitenLine Follower Robotvishal groverNoch keine Bewertungen
- 28 GHZ Millimeter Wave Cellular Communication Measurements For Reflection and Penetration Loss in and Around Buildings in New York CityDokument5 Seiten28 GHZ Millimeter Wave Cellular Communication Measurements For Reflection and Penetration Loss in and Around Buildings in New York CityJunyi LiNoch keine Bewertungen
- Equinox Lipo Cell Balancer-ManualDokument6 SeitenEquinox Lipo Cell Balancer-ManualKin TiriyasNoch keine Bewertungen
- Analysis and Implementation of Fuzzy Logic Controller Based MPPT To Enhance Power Quality in PV SystemDokument10 SeitenAnalysis and Implementation of Fuzzy Logic Controller Based MPPT To Enhance Power Quality in PV SystemEditor IJTSRDNoch keine Bewertungen
- Philips MDK 900Dokument2 SeitenPhilips MDK 900Heri MunirNoch keine Bewertungen
- Transas AIS T-201 Operational ManualDokument70 SeitenTransas AIS T-201 Operational ManualBhavin DoshiNoch keine Bewertungen
- VU Meter Circuit Stereo Mono 20 LED With PCBDokument9 SeitenVU Meter Circuit Stereo Mono 20 LED With PCBferdinandNoch keine Bewertungen