Das könnte Ihnen auch gefallen
- 1.3.vectores UnitariosDokument6 Seiten1.3.vectores UnitariosJavier MichayNoch keine Bewertungen
- Practica 1Dokument14 SeitenPractica 1Javier MichayNoch keine Bewertungen
- 1.1.incertidumbre de MediciónDokument20 Seiten1.1.incertidumbre de MediciónJavier MichayNoch keine Bewertungen
- 1.2.algebra VectorialDokument27 Seiten1.2.algebra VectorialJavier MichayNoch keine Bewertungen
- Michay Javier IndexacionDokument5 SeitenMichay Javier IndexacionJavier MichayNoch keine Bewertungen
- T2-Lenguaje EnsambladorDokument65 SeitenT2-Lenguaje EnsambladorJavier Michay100% (1)
- T2-mGuia MIPS32Dokument3 SeitenT2-mGuia MIPS32Javier MichayNoch keine Bewertungen
- Programa en CDokument2 SeitenPrograma en CJavier MichayNoch keine Bewertungen
- Instalación de R yRStudioDokument3 SeitenInstalación de R yRStudioJavier MichayNoch keine Bewertungen
- Programacio OODokument78 SeitenProgramacio OOLuis MartínezNoch keine Bewertungen
- Programación Orientada A ObjetosDokument124 SeitenProgramación Orientada A ObjetosDiego Tapia100% (1)
- Introducción A DropboxDokument10 SeitenIntroducción A Dropboxluis antonioNoch keine Bewertungen
- Tarea 1Dokument3 SeitenTarea 1Javier MichayNoch keine Bewertungen
- Tarea 1Dokument3 SeitenTarea 1Javier MichayNoch keine Bewertungen
- Vectores UnitariosDokument2 SeitenVectores UnitariosFrank Rodriguez CalleNoch keine Bewertungen
- EnsayoDokument9 SeitenEnsayoJavier MichayNoch keine Bewertungen
- Resumen AlgebraDokument4 SeitenResumen AlgebraJavier MichayNoch keine Bewertungen
- Práctica 6Dokument4 SeitenPráctica 6Javier MichayNoch keine Bewertungen
- Manual de Instalacion de AutocadDokument10 SeitenManual de Instalacion de AutocadJavier MichayNoch keine Bewertungen
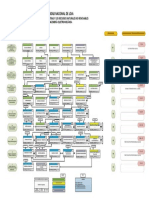
- Malla Ciem 2014Dokument1 SeiteMalla Ciem 2014Javier MichayNoch keine Bewertungen
- Resultado de Las EncuestasDokument3 SeitenResultado de Las EncuestasJavier MichayNoch keine Bewertungen
- Qui MicaDokument4 SeitenQui MicaJavier MichayNoch keine Bewertungen
- Qui MicaDokument4 SeitenQui MicaJavier MichayNoch keine Bewertungen
- Actividad Semana 3. Guía 1.Dokument5 SeitenActividad Semana 3. Guía 1.Javier Michay0% (1)
- Hack X Crack CMD Sin SecretosDokument41 SeitenHack X Crack CMD Sin SecretosEdgar Jimenez53% (17)
- Trabajo Dhb2Dokument13 SeitenTrabajo Dhb2Javier MichayNoch keine Bewertungen
- Trabajo Grupo DiseñoDokument7 SeitenTrabajo Grupo DiseñoJavier MichayNoch keine Bewertungen
- ProyectoDokument8 SeitenProyectoJavier MichayNoch keine Bewertungen
- Encuestas EstudiantesDokument3 SeitenEncuestas EstudiantesJavier MichayNoch keine Bewertungen
- Anexo 7 - Estudio HidraulicoDokument41 SeitenAnexo 7 - Estudio HidraulicoAlex Villafan RamírezNoch keine Bewertungen
- Tendencias de La Teoria General de SistemasDokument4 SeitenTendencias de La Teoria General de Sistemaslucianys anaisNoch keine Bewertungen
- Funciones VeritativasDokument9 SeitenFunciones VeritativasAnonymous pf2X9EZARHNoch keine Bewertungen
- TALLER 2 DE ESTADÍSTICA I (Industrial G2)Dokument1 SeiteTALLER 2 DE ESTADÍSTICA I (Industrial G2)Francisco Javier100% (1)
- Anexo 3 - ConexionesDokument69 SeitenAnexo 3 - ConexionesBenito CamelasNoch keine Bewertungen
- Cadenas de Markov Elias Rivera ValenciaDokument9 SeitenCadenas de Markov Elias Rivera ValenciaELIAS RIVERA VALENCIANoch keine Bewertungen
- Programa Lógica II-1980Dokument4 SeitenPrograma Lógica II-1980BIBHUMANoch keine Bewertungen
- Resumen Orden Interno, Estructura, SimetriaDokument17 SeitenResumen Orden Interno, Estructura, SimetriaErik Robinson Trincado CabezasNoch keine Bewertungen
- Relatoria Matematicas Antes de Big BangDokument13 SeitenRelatoria Matematicas Antes de Big BangNaydu CortesNoch keine Bewertungen
- Cuestionario 3Dokument10 SeitenCuestionario 3Pamelitah Cornejo PintoNoch keine Bewertungen
- Tipos de Comandos Del Lenguaje EnsambladorDokument4 SeitenTipos de Comandos Del Lenguaje EnsambladorMartin Jahdiel OrtizNoch keine Bewertungen
- 2 (Teoría Vocabulario Contextual)Dokument30 Seiten2 (Teoría Vocabulario Contextual)Yáñez Natalia100% (3)
- Trabajo Práctico FinalDokument19 SeitenTrabajo Práctico Finalრომინა კოლხურიNoch keine Bewertungen
- Practica 6 FinelDokument10 SeitenPractica 6 FinelNancyRamirezNoch keine Bewertungen
- 7 - Anticipación FuncionesDokument7 Seiten7 - Anticipación FuncionesRaulVenegas2011Noch keine Bewertungen
- Numero de ReynoldsDokument4 SeitenNumero de ReynoldsHenry VelasquezNoch keine Bewertungen
- Priemrparcialde Inferencia (s1-2017)Dokument1 SeitePriemrparcialde Inferencia (s1-2017)Lucho EnriqueNoch keine Bewertungen
- Reglamento para La Seguridad Estructural de Las ConstruccionesDokument19 SeitenReglamento para La Seguridad Estructural de Las ConstruccionesHerbert RacNoch keine Bewertungen
- P X Esuna Esfera de Radio7: 7. Considerar La Superficie Determinada Por La Ecuación + + 49. Se PideDokument2 SeitenP X Esuna Esfera de Radio7: 7. Considerar La Superficie Determinada Por La Ecuación + + 49. Se PideROYER MATTHEW BONIFACIO JULIANNoch keine Bewertungen
- Revisar Envío de Evaluación - 2da Simulacion PMP - PR112-..Dokument54 SeitenRevisar Envío de Evaluación - 2da Simulacion PMP - PR112-..Rayf Tomas100% (2)
- Guia para El Calculo de Incertidumbre 2009 - v2Dokument44 SeitenGuia para El Calculo de Incertidumbre 2009 - v2Lined Katherine PNoch keine Bewertungen
- Paso 5 DINAMICA SISTEMAS UNADDokument34 SeitenPaso 5 DINAMICA SISTEMAS UNADleidyganar100% (1)
- Grafico Mapa Conceptual Esquema Sencillo MulticolorDokument2 SeitenGrafico Mapa Conceptual Esquema Sencillo MulticolorKarla Monserrat Garcia FloresNoch keine Bewertungen
- Copia de Calculo FuncionesDokument1 SeiteCopia de Calculo FuncionesGermanSepulvedaBolivarNoch keine Bewertungen
- Teoria de Errores NuevoDokument93 SeitenTeoria de Errores NuevoWiwiDataNoch keine Bewertungen
- Sem 3 - MriDokument18 SeitenSem 3 - MriMiguel Angel Mora OlivariNoch keine Bewertungen
- Aula IiDokument29 SeitenAula IiTania jackely Larota bobadillaNoch keine Bewertungen
- Material RocosoDokument7 SeitenMaterial RocosoCARLOS MURILLONoch keine Bewertungen
- Guia fisicaFINAL2019Dokument54 SeitenGuia fisicaFINAL2019Ramiro KantutaNoch keine Bewertungen
- Parcal 2 UdeA 2020 1 SupletorioDokument1 SeiteParcal 2 UdeA 2020 1 SupletorioDaniel Lorenzo Claros Peña0% (1)