Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- 6 IPM Motor Design PDFDokument48 Seiten6 IPM Motor Design PDFAnonymous di05J3ZkTR100% (3)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- JMAG-RT Motor Model Library No PDFDokument2 SeitenJMAG-RT Motor Model Library No PDFAnonymous di05J3ZkTRNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- 6 IPM Motor DesignDokument48 Seiten6 IPM Motor DesignAnonymous di05J3ZkTRNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Development of High Efficiency Brushless DC Motor With New Manufacturing Method of Stator For CompressorsDokument10 SeitenDevelopment of High Efficiency Brushless DC Motor With New Manufacturing Method of Stator For CompressorsAnonymous di05J3ZkTRNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- JMAG-RT Motor Model Library NoDokument2 SeitenJMAG-RT Motor Model Library NoAnonymous di05J3ZkTRNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- JMAG-RT Motor Model Library NoDokument2 SeitenJMAG-RT Motor Model Library NoAnonymous di05J3ZkTRNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- JMAG-RT Motor Model Library NoDokument2 SeitenJMAG-RT Motor Model Library NoAnonymous di05J3ZkTRNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- JMAG-RT Motor Model Library NoDokument2 SeitenJMAG-RT Motor Model Library NoAnonymous di05J3ZkTRNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- JMAG-RT Motor Model Library NoDokument2 SeitenJMAG-RT Motor Model Library NoAnonymous di05J3ZkTRNoch keine Bewertungen
- JMAG-RT Motor Model Library NoDokument2 SeitenJMAG-RT Motor Model Library NoAnonymous di05J3ZkTRNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- JMAG-RT Motor Model Library NoDokument2 SeitenJMAG-RT Motor Model Library NoAnonymous di05J3ZkTRNoch keine Bewertungen
- JMAG-RT Motor Model Library NoDokument2 SeitenJMAG-RT Motor Model Library NoAnonymous di05J3ZkTRNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- JMAG-RT Motor Model Library NoDokument2 SeitenJMAG-RT Motor Model Library NoAnonymous di05J3ZkTRNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- JMAG-RT Motor Model Library NoDokument2 SeitenJMAG-RT Motor Model Library NoAnonymous di05J3ZkTRNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- JMAG-RT Motor Model Library NoDokument2 SeitenJMAG-RT Motor Model Library NoAnonymous di05J3ZkTRNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Indian Institute of Management KozhikodeDokument5 SeitenIndian Institute of Management KozhikodepranaliNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- BAM PPT 2011-09 Investor Day PDFDokument171 SeitenBAM PPT 2011-09 Investor Day PDFRocco HuangNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- GS Ep Cor 356Dokument7 SeitenGS Ep Cor 356SangaranNoch keine Bewertungen
- 2020-05-14 County Times NewspaperDokument32 Seiten2020-05-14 County Times NewspaperSouthern Maryland OnlineNoch keine Bewertungen
- Basic Electrical Design of A PLC Panel (Wiring Diagrams) - EEPDokument6 SeitenBasic Electrical Design of A PLC Panel (Wiring Diagrams) - EEPRobert GalarzaNoch keine Bewertungen
- 3) Stages of Group Development - To StudsDokument15 Seiten3) Stages of Group Development - To StudsDhannesh SweetAngelNoch keine Bewertungen
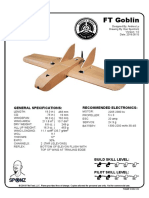
- FT Goblin Full SizeDokument7 SeitenFT Goblin Full SizeDeakon Frost100% (1)
- Miniature Circuit Breaker - Acti9 Ic60 - A9F54110Dokument2 SeitenMiniature Circuit Breaker - Acti9 Ic60 - A9F54110Gokul VenugopalNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Binaural Recording Technology: A Historical Review and Possible Future DevelopmentsDokument22 SeitenBinaural Recording Technology: A Historical Review and Possible Future DevelopmentsNery BorgesNoch keine Bewertungen
- Developing a Positive HR ClimateDokument15 SeitenDeveloping a Positive HR ClimateDrPurnima SharmaNoch keine Bewertungen
- CadLink Flyer 369044 937 Rev 00Dokument2 SeitenCadLink Flyer 369044 937 Rev 00ShanaHNoch keine Bewertungen
- PNB - Recruitment For The Post of Chief Security OfficerDokument3 SeitenPNB - Recruitment For The Post of Chief Security OfficerCareerNotifications.comNoch keine Bewertungen
- Aci 207.1Dokument38 SeitenAci 207.1safak kahraman100% (7)
- 1LE1503-2AA43-4AA4 Datasheet enDokument1 Seite1LE1503-2AA43-4AA4 Datasheet enAndrei LupuNoch keine Bewertungen
- KSRTC BokingDokument2 SeitenKSRTC BokingyogeshNoch keine Bewertungen
- Erp and Mis Project - Thanks To PsoDokument31 SeitenErp and Mis Project - Thanks To PsoAkbar Syed100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Chill - Lease NotesDokument19 SeitenChill - Lease Notesbellinabarrow100% (4)
- Guidelines On Accreditation of CSOs (LSB Representation) - DILG MC 2019-72Dokument18 SeitenGuidelines On Accreditation of CSOs (LSB Representation) - DILG MC 2019-72Cedric Dequito100% (1)
- MiniQAR MK IIDokument4 SeitenMiniQAR MK IIChristina Gray0% (1)
- Department Order No 05-92Dokument3 SeitenDepartment Order No 05-92NinaNoch keine Bewertungen
- B3 Zoning Diagram, Atlantic Yards/Pacific ParkDokument4 SeitenB3 Zoning Diagram, Atlantic Yards/Pacific ParkNorman OderNoch keine Bewertungen
- Analyze Oil Wear DebrisDokument2 SeitenAnalyze Oil Wear Debristhoma111sNoch keine Bewertungen
- Dairy DevelopmentDokument39 SeitenDairy DevelopmentHemanth Kumar RamachandranNoch keine Bewertungen
- Venturi Meter and Orifice Meter Flow Rate CalculationsDokument2 SeitenVenturi Meter and Orifice Meter Flow Rate CalculationsVoora GowthamNoch keine Bewertungen
- Super Flexible, Super Fast, Super Value: Gigabit PTMP Client and PTP With Modular AntennasDokument5 SeitenSuper Flexible, Super Fast, Super Value: Gigabit PTMP Client and PTP With Modular AntennasAbdallaNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- CFEExam Prep CourseDokument28 SeitenCFEExam Prep CourseM50% (4)
- 5.0 A Throttle Control H-BridgeDokument26 Seiten5.0 A Throttle Control H-Bridgerumellemur59Noch keine Bewertungen
- Portable dual-input thermometer with RS232 connectivityDokument2 SeitenPortable dual-input thermometer with RS232 connectivityTaha OpedNoch keine Bewertungen
- 1.1 Introduction To Networks - Networks Affect Our LivesDokument2 Seiten1.1 Introduction To Networks - Networks Affect Our LivesCristian MoralesNoch keine Bewertungen
- Alfa Laval Complete Fittings CatalogDokument224 SeitenAlfa Laval Complete Fittings CatalogGraciele SoaresNoch keine Bewertungen