Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- David P. Madsen - David A. Madsen Engineering Drawing and Design-277-345 PDFDokument69 SeitenDavid P. Madsen - David A. Madsen Engineering Drawing and Design-277-345 PDFSusana PerezNoch keine Bewertungen
- Introduction To CAD/CAMDokument81 SeitenIntroduction To CAD/CAMTafesse100% (6)
- Perl ArrayDokument3 SeitenPerl ArrayKeerthana SudarshanNoch keine Bewertungen
- 1 LabDokument7 Seiten1 LabKeerthana SudarshanNoch keine Bewertungen
- Replacement: Open OpenDokument1 SeiteReplacement: Open OpenKeerthana SudarshanNoch keine Bewertungen
- Perl ArrayDokument3 SeitenPerl ArrayKeerthana SudarshanNoch keine Bewertungen
- Print The Next Word After The Pattern MatchesDokument1 SeitePrint The Next Word After The Pattern MatchesKeerthana SudarshanNoch keine Bewertungen
- A Survey of Network-Based Intrusion Detection Data SetsDokument17 SeitenA Survey of Network-Based Intrusion Detection Data SetsKeerthana SudarshanNoch keine Bewertungen
- Scope of Scripting in VLSIDokument4 SeitenScope of Scripting in VLSIAamodh KuthethurNoch keine Bewertungen
- 1 Sessional 2021Dokument2 Seiten1 Sessional 2021Keerthana SudarshanNoch keine Bewertungen
- 9511 Chanak Netlist Processing For CuDokument105 Seiten9511 Chanak Netlist Processing For CuKeerthana SudarshanNoch keine Bewertungen
- Using Three-State Enable Registers in 4000Xla/Xv, and Spartan-Xl FpgasDokument7 SeitenUsing Three-State Enable Registers in 4000Xla/Xv, and Spartan-Xl FpgasKeerthana SudarshanNoch keine Bewertungen
- Design and Implementation of Power Estimation Technique For Digital Circuits IJERTV3IS041503Dokument10 SeitenDesign and Implementation of Power Estimation Technique For Digital Circuits IJERTV3IS041503Keerthana SudarshanNoch keine Bewertungen
- CSE 391 Lecture 8: Large Program Management with Make and AntDokument30 SeitenCSE 391 Lecture 8: Large Program Management with Make and AntKeerthana SudarshanNoch keine Bewertungen
- 9511 Chanak Netlist Processing For CuDokument105 Seiten9511 Chanak Netlist Processing For CuKeerthana SudarshanNoch keine Bewertungen
- Lab 7Dokument2 SeitenLab 7Keerthana SudarshanNoch keine Bewertungen
- Mininet Python API Reference Manual: Generated by Doxygen 1.8.3.1Dokument75 SeitenMininet Python API Reference Manual: Generated by Doxygen 1.8.3.1Keerthana SudarshanNoch keine Bewertungen
- 1 LabDokument7 Seiten1 LabKeerthana SudarshanNoch keine Bewertungen
- Grammer of GraphicsDokument7 SeitenGrammer of GraphicsRaju RimalNoch keine Bewertungen
- DF Date Du Cal Who Whoami WC Head Tail BC: LAB: 2 Explore The Commands The Given Below Basic CommandsDokument9 SeitenDF Date Du Cal Who Whoami WC Head Tail BC: LAB: 2 Explore The Commands The Given Below Basic CommandsKeerthana SudarshanNoch keine Bewertungen
- General knowledge quiz for class 5Dokument1 SeiteGeneral knowledge quiz for class 5Keerthana SudarshanNoch keine Bewertungen
- CBSE Class 5 GK Practice Worksheet (6) Word PuzzleDokument3 SeitenCBSE Class 5 GK Practice Worksheet (6) Word PuzzleKeerthana SudarshanNoch keine Bewertungen
- Subversion For Users - Training MaterialDokument20 SeitenSubversion For Users - Training MaterialKeerthana SudarshanNoch keine Bewertungen
- SVN Basics - Module 4 - Managing Conflicts - Test ManagementDokument3 SeitenSVN Basics - Module 4 - Managing Conflicts - Test ManagementKeerthana SudarshanNoch keine Bewertungen
- Handling Conflicts - Introduction To Subversion, An Open Source Version Control Tool - InformITDokument3 SeitenHandling Conflicts - Introduction To Subversion, An Open Source Version Control Tool - InformITKeerthana SudarshanNoch keine Bewertungen
- CBSE Class 5 GK Practice Worksheet PDFDokument1 SeiteCBSE Class 5 GK Practice Worksheet PDFKeerthana SudarshanNoch keine Bewertungen
- CBSE Class 5 GK Practice WorksheetDokument3 SeitenCBSE Class 5 GK Practice WorksheetKeerthana SudarshanNoch keine Bewertungen
- CBSE Class 5 GK Practice WorksheetDokument3 SeitenCBSE Class 5 GK Practice WorksheetveluselvamaniNoch keine Bewertungen
- CBSE Class 5 GK Practice WorksheetDokument4 SeitenCBSE Class 5 GK Practice WorksheetKeerthana SudarshanNoch keine Bewertungen
- CBSE Class 5 GK Practice WorksheetDokument3 SeitenCBSE Class 5 GK Practice WorksheetKeerthana SudarshanNoch keine Bewertungen
- CBSE Class 5 GK Practice WorksheetDokument4 SeitenCBSE Class 5 GK Practice WorksheetKeerthana SudarshanNoch keine Bewertungen
- CBSE Class 5 GK Practice WorksheetDokument3 SeitenCBSE Class 5 GK Practice WorksheetveluselvamaniNoch keine Bewertungen
- Engineering Drawing SylabousDokument11 SeitenEngineering Drawing SylabousysonuNoch keine Bewertungen
- Piping Isometric IntroductionDokument18 SeitenPiping Isometric IntroductionGodwinNoch keine Bewertungen
- Quarter 4 - Module 4Dokument19 SeitenQuarter 4 - Module 4DAPHNEE MAE AGUDONGNoch keine Bewertungen
- Lesson Exemplar in T.L.E Technical Drafting 8Dokument5 SeitenLesson Exemplar in T.L.E Technical Drafting 8rosievel cambeNoch keine Bewertungen
- Common Competency 2 - Interpret Technical Drawings and PlansDokument102 SeitenCommon Competency 2 - Interpret Technical Drawings and PlansAngel CastilloNoch keine Bewertungen
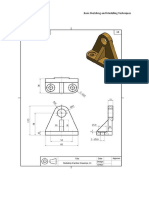
- Autodesk Inventor Basic Sketching and Modelling TechniquesDokument19 SeitenAutodesk Inventor Basic Sketching and Modelling TechniquesSwanBellaNoch keine Bewertungen
- Basic Technical Drawing: Grade 12Dokument109 SeitenBasic Technical Drawing: Grade 12Gumball 8Noch keine Bewertungen
- Learners Activity Sheet: I. Readings/DiscussionsDokument3 SeitenLearners Activity Sheet: I. Readings/DiscussionsMichael John SegarinoNoch keine Bewertungen
- TLE 7 8 Carpentry Module 9Dokument24 SeitenTLE 7 8 Carpentry Module 9Jhon Rey BalbastroNoch keine Bewertungen
- 3D Viewing and Visible Surface Detection ModuleDokument39 Seiten3D Viewing and Visible Surface Detection ModuleRitya KumariNoch keine Bewertungen
- Revised CJB Technical Drawing SBA Questions 2021 - 2022 With Mark Scheme September 2021Dokument46 SeitenRevised CJB Technical Drawing SBA Questions 2021 - 2022 With Mark Scheme September 2021David Dillon100% (1)
- Graphical ProjectionDokument23 SeitenGraphical ProjectionOmer ZahirNoch keine Bewertungen
- EIM 12 Quarter 3 L.O 2.1 Module 2 Week 2Dokument22 SeitenEIM 12 Quarter 3 L.O 2.1 Module 2 Week 2DivineMike19Noch keine Bewertungen
- 3D Rendering Pipeline OverviewDokument35 Seiten3D Rendering Pipeline OverviewjayNoch keine Bewertungen
- Anna University Civil Engineering - All Year, Semester Syllabus Ordered Lecture Notes and Study Material For College StudentsDokument249 SeitenAnna University Civil Engineering - All Year, Semester Syllabus Ordered Lecture Notes and Study Material For College StudentsM.V. TVNoch keine Bewertungen
- Module 4 - Orthographic Projections and PerspectiveDokument11 SeitenModule 4 - Orthographic Projections and PerspectiveArianne AtilasNoch keine Bewertungen
- MENG 102 Engineering Graphics and Visualization Lecture SL2: Winter 2022Dokument7 SeitenMENG 102 Engineering Graphics and Visualization Lecture SL2: Winter 2022hassals607Noch keine Bewertungen
- EDCAD (Engg Science)Dokument11 SeitenEDCAD (Engg Science)jigarNoch keine Bewertungen
- Introduction To Engineering Drawing & Orthographic ProjectionsDokument55 SeitenIntroduction To Engineering Drawing & Orthographic ProjectionsSHIVA THAVANINoch keine Bewertungen
- 1 ADM PLUMBING GRADE 9 1st QuarterDokument33 Seiten1 ADM PLUMBING GRADE 9 1st QuarterMelnard Alcayde100% (2)
- DraftingDokument17 SeitenDraftingroiNoch keine Bewertungen
- Projections Theory: Types and Applications in 3D ModelingDokument59 SeitenProjections Theory: Types and Applications in 3D ModelingPrashant ChaudhryNoch keine Bewertungen
- IMEED NMU SyllabusDokument3 SeitenIMEED NMU Syllabusnavneet patilNoch keine Bewertungen
- Projection of Lines: University Institute of EngineeringDokument16 SeitenProjection of Lines: University Institute of EngineeringNikitaNoch keine Bewertungen
- Geometric Construction and Orthographic ProjectionsDokument11 SeitenGeometric Construction and Orthographic ProjectionsJeoven Izekiel RedeliciaNoch keine Bewertungen
- Self Learning Kit w8Dokument15 SeitenSelf Learning Kit w8Christian GandezaNoch keine Bewertungen
- Mep100 PDFDokument229 SeitenMep100 PDFrupa225chandu_327248Noch keine Bewertungen
- Engineering Drawing For BeginnersDokument133 SeitenEngineering Drawing For BeginnersMd. Mehedi HasanNoch keine Bewertungen