Das könnte Ihnen auch gefallen
- IntroDokument18 SeitenIntroPatrick SibandaNoch keine Bewertungen
- Mathematics Project 2022Dokument23 SeitenMathematics Project 2022Bhakti KhanijoNoch keine Bewertungen
- 1 s2.0 S0377042716302989 MainDokument10 Seiten1 s2.0 S0377042716302989 MainJosé VanterlerNoch keine Bewertungen
- Energy Principles and Finite Element Methods For PDokument15 SeitenEnergy Principles and Finite Element Methods For Paarvee.armoorNoch keine Bewertungen
- Marino Winkert Nonl Anal 2019Dokument16 SeitenMarino Winkert Nonl Anal 2019Edgar AntonioNoch keine Bewertungen
- 8.044 Statistical Physics I: Mit OpencoursewareDokument9 Seiten8.044 Statistical Physics I: Mit Opencoursewarecpooi9487Noch keine Bewertungen
- 04 MPC JBRDokument23 Seiten04 MPC JBRVuongTrinhNoch keine Bewertungen
- Part3. 实用教程 - Practical Regression and ANOVA using RDokument102 SeitenPart3. 实用教程 - Practical Regression and ANOVA using Rapi-19919644Noch keine Bewertungen
- Cpaa 2002 1 531Dokument15 SeitenCpaa 2002 1 531Thịnh TrầnNoch keine Bewertungen
- Ug An20gDokument7 SeitenUg An20gSaurav ChandanNoch keine Bewertungen
- Cs 7265 Big Data Analytics Regularization On Linear Model: Mingon Kang, PH.D Computer Science, Kennesaw State UniversityDokument24 SeitenCs 7265 Big Data Analytics Regularization On Linear Model: Mingon Kang, PH.D Computer Science, Kennesaw State Universityazjajaoan malayaNoch keine Bewertungen
- Statistical Data Analysis: PH4515: 1 Course StructureDokument5 SeitenStatistical Data Analysis: PH4515: 1 Course StructurePhD LIVENoch keine Bewertungen
- Similarity Solutions of Partial Differential EquationsDokument22 SeitenSimilarity Solutions of Partial Differential EquationsSamlesh ChoudhuryNoch keine Bewertungen
- Binepdf MAT2001 1Dokument110 SeitenBinepdf MAT2001 1Shaunak BagadeNoch keine Bewertungen
- Linear Algebra: Chapter 1 - Logic, Sets, Maps and Complex NumbersDokument61 SeitenLinear Algebra: Chapter 1 - Logic, Sets, Maps and Complex Numbersđức trầnNoch keine Bewertungen
- Lec 6 GinverseDokument43 SeitenLec 6 GinverseValeria MoneroNoch keine Bewertungen
- Chapter 1Dokument107 SeitenChapter 1Nguyên BùiNoch keine Bewertungen
- Probability and Stochastic ModelsDokument78 SeitenProbability and Stochastic ModelsKatie CookNoch keine Bewertungen
- Scalable Implicit Algorithms For Sti Hyperbolic PDE Systems: L. ChacónDokument38 SeitenScalable Implicit Algorithms For Sti Hyperbolic PDE Systems: L. ChacónWei GaoNoch keine Bewertungen
- On The Eigenvalue of $P (X) $-Laplace Equation: ArticleDokument37 SeitenOn The Eigenvalue of $P (X) $-Laplace Equation: ArticleVasi UtaNoch keine Bewertungen
- Irreducible Polynomials That Factor Mod Every Prime: Reed JacobsDokument23 SeitenIrreducible Polynomials That Factor Mod Every Prime: Reed JacobsValentioNoch keine Bewertungen
- Attempting To Reverse The Irreversible in Quantum PhysicsDokument31 SeitenAttempting To Reverse The Irreversible in Quantum PhysicsMark M. WildeNoch keine Bewertungen
- Chapter 3Dokument36 SeitenChapter 3Anish KumarNoch keine Bewertungen
- Hindawi2022 Numerical Solution of AVEDokument9 SeitenHindawi2022 Numerical Solution of AVE1915607Noch keine Bewertungen
- C3 ProbDokument12 SeitenC3 ProbSakshi RaiNoch keine Bewertungen
- 18.445 Introduction To Stochastic Processes: Lecture 3: Markov Chains: Time-ReversalDokument12 Seiten18.445 Introduction To Stochastic Processes: Lecture 3: Markov Chains: Time-ReversalAdityaPandhareNoch keine Bewertungen
- CI 4 ContinuityDokument32 SeitenCI 4 ContinuityNguyên BùiNoch keine Bewertungen
- HST.582J / 6.555J / 16.456J Biomedical Signal and Image ProcessingDokument4 SeitenHST.582J / 6.555J / 16.456J Biomedical Signal and Image ProcessingShafayet UddinNoch keine Bewertungen
- Chapter 1. Functions, Limits and Continuity: Vietnam National University - Hochiminh City International UniversityDokument115 SeitenChapter 1. Functions, Limits and Continuity: Vietnam National University - Hochiminh City International UniversityKensleyTsangNoch keine Bewertungen
- KeithDokument21 SeitenKeithAnirban NathNoch keine Bewertungen
- Discrete Math ReviewerDokument23 SeitenDiscrete Math ReviewerJayson C SepedaNoch keine Bewertungen
- Stata Lecture2Dokument134 SeitenStata Lecture2lukyindonesiaNoch keine Bewertungen
- Mahendra Colege of Engineering: Finite Element Analysis Unit Test-1Dokument1 SeiteMahendra Colege of Engineering: Finite Element Analysis Unit Test-1phdsureshNoch keine Bewertungen
- 6300 Solutionsmanual FreeDokument80 Seiten6300 Solutionsmanual FreeKort LeonardnforNoch keine Bewertungen
- 7 Beam-ColumnDokument15 Seiten7 Beam-ColumnIrish TambisNoch keine Bewertungen
- Phar 2813 RevisionDokument19 SeitenPhar 2813 RevisionTrung NguyenNoch keine Bewertungen
- Bayes&Voice RecognitionDokument76 SeitenBayes&Voice RecognitionEdgar ArroyoNoch keine Bewertungen
- Unit-Ii Bayesian Decision TheoryDokument22 SeitenUnit-Ii Bayesian Decision TheoryJoyce GeorgeNoch keine Bewertungen
- Sparse Principal Component AnalysisDokument23 SeitenSparse Principal Component Analysis方鑫然Noch keine Bewertungen
- QM SlidesDokument114 SeitenQM SlidesAnurag SharmaNoch keine Bewertungen
- Oct 2001Dokument22 SeitenOct 2001linpaws19907444Noch keine Bewertungen
- Logic, Sets, Functions: Pham Quang DungDokument20 SeitenLogic, Sets, Functions: Pham Quang DungTrungNoch keine Bewertungen
- Analytical Solution For Finite Domain Laplacian Equation With Coexistent Boundary ConditionsDokument17 SeitenAnalytical Solution For Finite Domain Laplacian Equation With Coexistent Boundary ConditionsYoyaa WllNoch keine Bewertungen
- Numerical Solutions of Linear and Nonlinear Singular Perturbation Problems PDFDokument19 SeitenNumerical Solutions of Linear and Nonlinear Singular Perturbation Problems PDFPunnamChandar BitlaNoch keine Bewertungen
- M3 Kalman Filter EquationsDokument131 SeitenM3 Kalman Filter EquationsHang CuiNoch keine Bewertungen
- MAT194 CourseSummary (2013F)Dokument28 SeitenMAT194 CourseSummary (2013F)Eric RogersNoch keine Bewertungen
- Remarks On Eigenvalue Problems Involving The P (X) - Laplacian: Xianling FanDokument14 SeitenRemarks On Eigenvalue Problems Involving The P (X) - Laplacian: Xianling FanVasi UtaNoch keine Bewertungen
- Mathematics Promotional Exam Cheat SheetDokument8 SeitenMathematics Promotional Exam Cheat SheetAlan AwNoch keine Bewertungen
- Hardy TypeinequalitiesonquantumcalculusDokument143 SeitenHardy TypeinequalitiesonquantumcalculusIrfan AliNoch keine Bewertungen
- Partial Inverse Regression: Biometrika (2007), 94, 3, Pp. 615-625 Printed in Great BritainDokument12 SeitenPartial Inverse Regression: Biometrika (2007), 94, 3, Pp. 615-625 Printed in Great BritainLiliana ForzaniNoch keine Bewertungen
- Regularization Paths For Generalized Linear Models Via Coordinate DescentDokument24 SeitenRegularization Paths For Generalized Linear Models Via Coordinate DescentliuNoch keine Bewertungen
- Limits and Continuity II Presentation SlidesDokument37 SeitenLimits and Continuity II Presentation SlidesS.m. ChandrashekarNoch keine Bewertungen
- WeibullDokument15 SeitenWeibullveeraj_seeboruth100% (1)
- Advanced Beam Dynamics & Hamiltonian Formalism: Rick Baartman, TRIUMF February 3, 2015Dokument28 SeitenAdvanced Beam Dynamics & Hamiltonian Formalism: Rick Baartman, TRIUMF February 3, 2015s gNoch keine Bewertungen
- Economics 536 Introduction To Specification Testing in Dynamic Econometric ModelsDokument6 SeitenEconomics 536 Introduction To Specification Testing in Dynamic Econometric ModelsMaria RoaNoch keine Bewertungen
- Meshless and Generalized Finite Element Methods: A Survey of Some Major ResultsDokument20 SeitenMeshless and Generalized Finite Element Methods: A Survey of Some Major ResultsJorge Luis Garcia ZuñigaNoch keine Bewertungen
- 9: Hypothesis Testing: 1 Some DefinitionsDokument6 Seiten9: Hypothesis Testing: 1 Some DefinitionsRob GallagherNoch keine Bewertungen
- PDLAMMPS - Made Easy: 1 Peridynamic Theory of SolidsDokument8 SeitenPDLAMMPS - Made Easy: 1 Peridynamic Theory of SolidsSaeed AbdNoch keine Bewertungen
- Ciric Wata2020 2021Dokument16 SeitenCiric Wata2020 2021Miroslav ĆirićNoch keine Bewertungen
- PH-213 Chapter-33 Energy Transport and The Poynting VectorDokument6 SeitenPH-213 Chapter-33 Energy Transport and The Poynting VectorPatrick SibandaNoch keine Bewertungen
- PH-223 La Rosa Lecture 13 PDFDokument39 SeitenPH-223 La Rosa Lecture 13 PDFPatrick SibandaNoch keine Bewertungen
- Sample Exam-1 Phys-213 PDFDokument7 SeitenSample Exam-1 Phys-213 PDFPatrick SibandaNoch keine Bewertungen
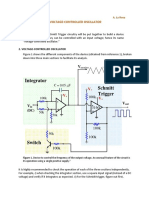
- 2018 Lab 5B Voltage-Controlled - OscillatorDokument4 Seiten2018 Lab 5B Voltage-Controlled - OscillatorPatrick SibandaNoch keine Bewertungen
- Sample Exam 2 Phys 213Dokument8 SeitenSample Exam 2 Phys 213Patrick SibandaNoch keine Bewertungen
- Statutory Instruments 17: The Zambia Qualifications Authority Act, 2011Dokument19 SeitenStatutory Instruments 17: The Zambia Qualifications Authority Act, 2011Patrick SibandaNoch keine Bewertungen
- Chapter 10: Scattering and Diffraction: 10.1 Scattering at Long WavelengthDokument42 SeitenChapter 10: Scattering and Diffraction: 10.1 Scattering at Long WavelengthPatrick SibandaNoch keine Bewertungen
- Ch06 PDFDokument52 SeitenCh06 PDFPatrick SibandaNoch keine Bewertungen
- Chapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Dokument73 SeitenChapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Patrick SibandaNoch keine Bewertungen
- Chapter Three: 3.2 Legendre Equation and Legendre PolynomialsDokument73 SeitenChapter Three: 3.2 Legendre Equation and Legendre PolynomialsPatrick SibandaNoch keine Bewertungen
- MAST20032 Vector Calculus: Advanced: School of Mathematics and Statistics The University of MelbourneDokument166 SeitenMAST20032 Vector Calculus: Advanced: School of Mathematics and Statistics The University of Melbourneclarencet179Noch keine Bewertungen
- CBSE Class 9 Mathematics WorksheetDokument2 SeitenCBSE Class 9 Mathematics WorksheetLena danilovskaNoch keine Bewertungen
- Project Proposal Fourth StatsDokument1 SeiteProject Proposal Fourth StatsRAZEL ALCANTARANoch keine Bewertungen
- Graded Discussion 1Dokument4 SeitenGraded Discussion 1Dane SinclairNoch keine Bewertungen
- Homework 6Dokument9 SeitenHomework 6Jaskirat MannNoch keine Bewertungen
- Notes On Solving The Black-Scholes EquationDokument20 SeitenNotes On Solving The Black-Scholes EquationCaroline YanNoch keine Bewertungen
- MidtermDokument6 SeitenMidtermJerland Ocster YaboNoch keine Bewertungen
- IcanDokument33 SeitenIcanLubnaNoch keine Bewertungen
- Assignment Problems: Guoming TangDokument26 SeitenAssignment Problems: Guoming TangManueli Kebbles MckubwaNoch keine Bewertungen
- Oswaal 25 Years - DIDokument116 SeitenOswaal 25 Years - DIiamtarunkr11Noch keine Bewertungen
- Ae56 D10Dokument4 SeitenAe56 D10MahadevNoch keine Bewertungen
- SAS FunctionsDokument5 SeitenSAS FunctionsSan DeepNoch keine Bewertungen
- Simulation of Diffusion: Steady-State Diffusion Transient DiffusionDokument16 SeitenSimulation of Diffusion: Steady-State Diffusion Transient DiffusionSai PreethamNoch keine Bewertungen
- 3 ArguementDokument26 Seiten3 ArguementMohammad huzaifaNoch keine Bewertungen
- 5 - Chapter 4 - AMDokument12 Seiten5 - Chapter 4 - AMBinary Mass MascotNoch keine Bewertungen
- EASY Marks NCERT Exemplar Problems-Solutions MaClass 12 (2018-19) - Team of Experience Authors PDFDokument505 SeitenEASY Marks NCERT Exemplar Problems-Solutions MaClass 12 (2018-19) - Team of Experience Authors PDFdhawandNoch keine Bewertungen
- Notes-Ma131 ch6 PDFDokument12 SeitenNotes-Ma131 ch6 PDFXcalibur1101Noch keine Bewertungen
- W5A1Dokument5 SeitenW5A1Senthil Kumar GanesanNoch keine Bewertungen
- Course 214 Section 1: Basic Theorems of Complex Analysis Second Semester 2008Dokument25 SeitenCourse 214 Section 1: Basic Theorems of Complex Analysis Second Semester 2008saraswatthiNoch keine Bewertungen
- Chemistry 311:: Instructor: Course DescriptionDokument33 SeitenChemistry 311:: Instructor: Course DescriptionPaul Venson RaraNoch keine Bewertungen
- VMA 15 ICH Topic Q2 (R1), EMEA, Validation of Analytical ProcedureDokument15 SeitenVMA 15 ICH Topic Q2 (R1), EMEA, Validation of Analytical Procedureklr mnsdNoch keine Bewertungen
- Modern Construction EnvelopesDokument522 SeitenModern Construction EnvelopesJohn67% (3)
- ACG 14 (04.01.09) - 0 Guideline On Validation of MethodsDokument2 SeitenACG 14 (04.01.09) - 0 Guideline On Validation of Methodsesivaks2000Noch keine Bewertungen
- Riemann Zeta Function, Nicely Visualised PDFDokument26 SeitenRiemann Zeta Function, Nicely Visualised PDFLazarNoch keine Bewertungen
- Advanced Structural Analysis: Felix V. Garde, JR., MsceDokument11 SeitenAdvanced Structural Analysis: Felix V. Garde, JR., MsceJAYSON BANTAYANNoch keine Bewertungen
- 6159 Carys Parry CarysParryDissertation2016 108005 739418305 PDFDokument71 Seiten6159 Carys Parry CarysParryDissertation2016 108005 739418305 PDFCrisha Mae GeronimoNoch keine Bewertungen
- Decision Tree Algorithm: and Classification Problems TooDokument12 SeitenDecision Tree Algorithm: and Classification Problems TooAva WhiteNoch keine Bewertungen
- Chapter 6 - 2020 - 21 PDFDokument31 SeitenChapter 6 - 2020 - 21 PDFAiman ZaidiNoch keine Bewertungen