Das könnte Ihnen auch gefallen
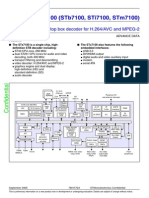
- ST7100 DS 2005 SeptemberDokument1.085 SeitenST7100 DS 2005 SeptemberSerg GorohNoch keine Bewertungen
- STM32F446-ARM Nucleo Board User's Manual: D.K. Blandford August, 2017 Updated November 3, 2017Dokument60 SeitenSTM32F446-ARM Nucleo Board User's Manual: D.K. Blandford August, 2017 Updated November 3, 2017Anil SuhaNoch keine Bewertungen
- Pmc20-E 03Dokument65 SeitenPmc20-E 03Juan FresnedaNoch keine Bewertungen
- DRS Pixhawk 2 17th March 2016Dokument29 SeitenDRS Pixhawk 2 17th March 2016Nguyen Trong NghiaNoch keine Bewertungen
- HX 220c m5 Specsheet PDFDokument64 SeitenHX 220c m5 Specsheet PDFJawad KhawajaNoch keine Bewertungen
- An4938 Getting Started With Stm32h74xig and Stm32h75xig Hardware Development Stmicroelectronics PDFDokument47 SeitenAn4938 Getting Started With Stm32h74xig and Stm32h75xig Hardware Development Stmicroelectronics PDFMax INoch keine Bewertungen
- B7845PLVC en PDFDokument345 SeitenB7845PLVC en PDFAsa ReidNoch keine Bewertungen
- UM2407 User Manual: STM32H7 Nucleo-144 Boards (MB1364)Dokument50 SeitenUM2407 User Manual: STM32H7 Nucleo-144 Boards (MB1364)Jonathan GonzagaNoch keine Bewertungen
- STMicrodevices Sti 7100Dokument1.085 SeitenSTMicrodevices Sti 7100kernu100% (1)
- Stc12c5616ad enDokument377 SeitenStc12c5616ad enali haghshenasNoch keine Bewertungen
- An4856 Stevalisa172v2 2 KW Fully Digital Ac DC Power Supply Dsmps Evaluation Board StmicroelectronicsDokument74 SeitenAn4856 Stevalisa172v2 2 KW Fully Digital Ac DC Power Supply Dsmps Evaluation Board StmicroelectronicsStefano SalaNoch keine Bewertungen
- Stm32w108 DatasheetDokument197 SeitenStm32w108 DatasheetGeorge HarrisNoch keine Bewertungen
- LT-899 INX-10A Installation and Operation ManualDokument104 SeitenLT-899 INX-10A Installation and Operation ManualJesus HinostrozaNoch keine Bewertungen
- HBM WTX ManualDokument439 SeitenHBM WTX Manualslash rockerzNoch keine Bewertungen
- W5500 DatasheetDokument66 SeitenW5500 DatasheetRosa Edilma HurtadoNoch keine Bewertungen
- MIPI LVDS ICN6202 Specification V08Dokument22 SeitenMIPI LVDS ICN6202 Specification V08周勇Noch keine Bewertungen
- Training Manual Philips EPIQ 5 7 PDFDokument109 SeitenTraining Manual Philips EPIQ 5 7 PDFR100% (1)
- 1756-XXXX ControlLogix Digital I-O ModulesDokument312 Seiten1756-XXXX ControlLogix Digital I-O Modulesdaovanthanh_bk2007100% (1)
- RTU-710H Wireless I/O Module With On-Off and Analog I/O: Claudiastr. 5 51149 Köln-Porz GermanyDokument81 SeitenRTU-710H Wireless I/O Module With On-Off and Analog I/O: Claudiastr. 5 51149 Köln-Porz GermanySumeet TrivediNoch keine Bewertungen
- DatasheetDokument88 SeitenDatasheetmarino246Noch keine Bewertungen
- Um2407 stm32h7 Nucleo144 Boards mb1364 StmicroelectronicsDokument49 SeitenUm2407 stm32h7 Nucleo144 Boards mb1364 StmicroelectronicsFelipeAlmeidaNoch keine Bewertungen
- AN4938 Application Note: Getting Started With STM32H74xI/G and STM32H75xI/G Hardware DevelopmentDokument46 SeitenAN4938 Application Note: Getting Started With STM32H74xI/G and STM32H75xI/G Hardware DevelopmentHoàng Nam NguyễnNoch keine Bewertungen
- UM2435 User Manual: Bluetooth Low Energy and 802.15.4 Nucleo Pack Based On STM32WB Series MicrocontrollersDokument48 SeitenUM2435 User Manual: Bluetooth Low Energy and 802.15.4 Nucleo Pack Based On STM32WB Series MicrocontrollersCoedozNoch keine Bewertungen
- RTU560 Remote Terminal Unit: Subdevice Communication Interface With Hitachi HDLC ProtocolDokument33 SeitenRTU560 Remote Terminal Unit: Subdevice Communication Interface With Hitachi HDLC ProtocolTauqeer AhmedNoch keine Bewertungen
- Stratix 5700 Ethernet Managed Switches: User ManualDokument260 SeitenStratix 5700 Ethernet Managed Switches: User ManualAlain AlvaradoNoch keine Bewertungen
- Ug1066 Vcu108 Eval BDDokument140 SeitenUg1066 Vcu108 Eval BDCameronNoch keine Bewertungen
- Getting Started With The Six-Step Firmware LibraryDokument37 SeitenGetting Started With The Six-Step Firmware LibraryMihaiNeacsuNoch keine Bewertungen
- UM2411 User Manual: Discovery Kit With STM32H747XI MCUDokument61 SeitenUM2411 User Manual: Discovery Kit With STM32H747XI MCUFarouk ElNoch keine Bewertungen
- Ug1221 Zcu102 Base TRD PDFDokument88 SeitenUg1221 Zcu102 Base TRD PDFjcxz6053Noch keine Bewertungen
- 3731.Z-Stack ZNP Interface SpecificationDokument31 Seiten3731.Z-Stack ZNP Interface SpecificationKarthickNoch keine Bewertungen
- Acurite 3500i Manual NuevoDokument960 SeitenAcurite 3500i Manual NuevoAlonso BarreraNoch keine Bewertungen
- Axis User Manual - HeberDokument63 SeitenAxis User Manual - HeberArturo ArmuellesNoch keine Bewertungen
- UM2408 User Manual: STM32H7 Nucleo-144 Boards (MB1363)Dokument56 SeitenUM2408 User Manual: STM32H7 Nucleo-144 Boards (MB1363)ravikiranzz12345Noch keine Bewertungen
- Zaks - Microprocessor - Interfacing - TechniquesDokument466 SeitenZaks - Microprocessor - Interfacing - TechniquesAdam CampbellNoch keine Bewertungen
- Cisco HyperFlexDokument68 SeitenCisco HyperFlexMaurício SousaNoch keine Bewertungen
- DatasheetDokument87 SeitenDatasheetcarlos duranNoch keine Bewertungen
- User Manual: STM32 Nucleo-144 BoardsDokument82 SeitenUser Manual: STM32 Nucleo-144 BoardsJose RobertoNoch keine Bewertungen
- AM654x IDK UserGuide Spruim6Dokument75 SeitenAM654x IDK UserGuide Spruim6Novica JovanovicNoch keine Bewertungen
- Scout 55Dokument52 SeitenScout 55Catalin Firicel100% (1)
- SRAL XD Technical ManualDokument65 SeitenSRAL XD Technical ManualAnnA___86100% (2)
- PCA6751 Manual Ed.4Dokument111 SeitenPCA6751 Manual Ed.4remstan7Noch keine Bewertungen
- MC56F8006Dokument100 SeitenMC56F8006andreferreira_eletricaNoch keine Bewertungen
- Intel 845G/845GL/845GV Chipset: DatasheetDokument193 SeitenIntel 845G/845GL/845GV Chipset: DatasheetSatadru BeraNoch keine Bewertungen
- Tutorialv0 3Dokument92 SeitenTutorialv0 3Malu MohanNoch keine Bewertungen
- Beginning Micro Controllers MSP430 - V0.3 - Gustavo LitovskyDokument92 SeitenBeginning Micro Controllers MSP430 - V0.3 - Gustavo LitovskyDiego VelascoNoch keine Bewertungen
- PAC E500 English Manual (060214)Dokument76 SeitenPAC E500 English Manual (060214)tafseerahmedNoch keine Bewertungen
- Stc12c5616ad STC PDFDokument377 SeitenStc12c5616ad STC PDFJorge A. MoreNoch keine Bewertungen
- St72321Brx, St72321Barx St72321Bjx, St72321BkxDokument188 SeitenSt72321Brx, St72321Barx St72321Bjx, St72321BkxJorge Arilio Gonzalez ArangoNoch keine Bewertungen
- MC68HC908LJ24Dokument464 SeitenMC68HC908LJ24Pedro Lopez RodriguezNoch keine Bewertungen
- Digital Control Board For Phased Array Antenna Beam Steering in ADokument115 SeitenDigital Control Board For Phased Array Antenna Beam Steering in AJaime LazoNoch keine Bewertungen
- Installation Manual EnUS 2500893963Dokument112 SeitenInstallation Manual EnUS 2500893963elistefanNoch keine Bewertungen
- Red 670Dokument47 SeitenRed 670Hendra WeNoch keine Bewertungen
- Practical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsVon EverandPractical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsBewertung: 5 von 5 Sternen5/5 (6)
- Low-Power Design of Nanometer FPGAs: Architecture and EDAVon EverandLow-Power Design of Nanometer FPGAs: Architecture and EDANoch keine Bewertungen
- CAN and FPGA Communication Engineering: Implementation of a CAN Bus based Measurement System on an FPGA Development KitVon EverandCAN and FPGA Communication Engineering: Implementation of a CAN Bus based Measurement System on an FPGA Development KitNoch keine Bewertungen
- FinFET Modeling for IC Simulation and Design: Using the BSIM-CMG StandardVon EverandFinFET Modeling for IC Simulation and Design: Using the BSIM-CMG StandardBewertung: 5 von 5 Sternen5/5 (1)
- Arduino and Raspberry Pi Sensor Projects for the Evil GeniusVon EverandArduino and Raspberry Pi Sensor Projects for the Evil GeniusNoch keine Bewertungen
- PIC Microcontroller Projects in C: Basic to AdvancedVon EverandPIC Microcontroller Projects in C: Basic to AdvancedBewertung: 5 von 5 Sternen5/5 (10)
- Excel Magic Tric 358 Part 1 Return Multiple Item From One LookupDokument59 SeitenExcel Magic Tric 358 Part 1 Return Multiple Item From One LookupFazrulNoch keine Bewertungen
- 338 Disposal of DisusedDokument40 Seiten338 Disposal of DisusedFazrulNoch keine Bewertungen
- Forankra en Catalogue 2019Dokument278 SeitenForankra en Catalogue 2019FazrulNoch keine Bewertungen
- HD Issue 215-June 2022-English FinalDokument9 SeitenHD Issue 215-June 2022-English FinalFazrulNoch keine Bewertungen
- Airline Safety Assessment Mechanism: Safe TravelDokument64 SeitenAirline Safety Assessment Mechanism: Safe TravelFazrulNoch keine Bewertungen
- OGP Recommended Practices For Contracted Air Operationes 410Dokument26 SeitenOGP Recommended Practices For Contracted Air Operationes 410Rene100% (1)
- 338 Disposal of DisusedDokument40 Seiten338 Disposal of DisusedFazrulNoch keine Bewertungen
- IOGP Brexit PositionDokument1 SeiteIOGP Brexit PositionFazrulNoch keine Bewertungen
- Infographic - Detection of COVID-19Dokument1 SeiteInfographic - Detection of COVID-19FazrulNoch keine Bewertungen
- 338 Disposal of DisusedDokument40 Seiten338 Disposal of DisusedFazrulNoch keine Bewertungen
- Comparison of EPIRBs and ELTsDokument3 SeitenComparison of EPIRBs and ELTsFazrulNoch keine Bewertungen
- Schema Instructions v7 Final Flattened Schema Oct2016Dokument10 SeitenSchema Instructions v7 Final Flattened Schema Oct2016FazrulNoch keine Bewertungen
- FS-l6S: Instruction ManualDokument25 SeitenFS-l6S: Instruction ManualFazrulNoch keine Bewertungen
- IOGP Position Paper On CHC Helicopter Crash Norway 29 April 2016Dokument2 SeitenIOGP Position Paper On CHC Helicopter Crash Norway 29 April 2016FazrulNoch keine Bewertungen
- IOGP Brexit PositionDokument1 SeiteIOGP Brexit PositionFazrulNoch keine Bewertungen
- 338 Disposal of DisusedDokument40 Seiten338 Disposal of DisusedFazrulNoch keine Bewertungen
- Human FactorDokument8 SeitenHuman FactorFatih D. PrasetioNoch keine Bewertungen
- Human FactorDokument8 SeitenHuman FactorFatih D. PrasetioNoch keine Bewertungen
- Macondo Web Post GIRG Final 300113Dokument4 SeitenMacondo Web Post GIRG Final 300113FazrulNoch keine Bewertungen
- Schema Instructions v7 Final Flattened Schema Oct2016Dokument10 SeitenSchema Instructions v7 Final Flattened Schema Oct2016FazrulNoch keine Bewertungen
- Sky-Walker Pro Manual V1.03Dokument18 SeitenSky-Walker Pro Manual V1.03FazrulNoch keine Bewertungen
- Foxtech FPV System: Product SpecificationsDokument6 SeitenFoxtech FPV System: Product SpecificationsFazrulNoch keine Bewertungen
- MFD AutoPilot V1.16 beta manual under 40 charsDokument37 SeitenMFD AutoPilot V1.16 beta manual under 40 charsFazrulNoch keine Bewertungen
- RW832 5.8G To WiFi Receiver User ManualDokument3 SeitenRW832 5.8G To WiFi Receiver User ManualFazrulNoch keine Bewertungen
- Tele Fly ProDokument9 SeitenTele Fly ProFazrulNoch keine Bewertungen
- Foxtech Seeker-18 User ManualDokument5 SeitenFoxtech Seeker-18 User ManualFazrulNoch keine Bewertungen
- Foxtech FPV System: Product SpecificationsDokument6 SeitenFoxtech FPV System: Product SpecificationsFazrulNoch keine Bewertungen
- Mytwindream 1800Mm FPV Plane: User ManualDokument27 SeitenMytwindream 1800Mm FPV Plane: User ManualorangramaiNoch keine Bewertungen
- RCB 19 PDFDokument126 SeitenRCB 19 PDFmohd firdaus bin ibrahim100% (1)
- Plan F4Dokument44 SeitenPlan F4FazrulNoch keine Bewertungen
- Fundamentals of Socket ProgrammingDokument38 SeitenFundamentals of Socket ProgrammingLuis ClarkNoch keine Bewertungen
- Introduction of LatexDokument33 SeitenIntroduction of LatexAhmad Zhafri Samsudin100% (2)
- Kaiser-Meyer-Olkin Measure of Sampling Adequacy. .545 Bartlett's Test of Sphericity Approx. Chi-Square 199.860 DF 91 Sig. .000Dokument4 SeitenKaiser-Meyer-Olkin Measure of Sampling Adequacy. .545 Bartlett's Test of Sphericity Approx. Chi-Square 199.860 DF 91 Sig. .000Harpreet ThindNoch keine Bewertungen
- Python Bokeh Cheat Sheet PDFDokument1 SeitePython Bokeh Cheat Sheet PDFrakesharumallaNoch keine Bewertungen
- 15 Pawn FormationsDokument11 Seiten15 Pawn FormationsCMCNoch keine Bewertungen
- SK council discusses urban gardening and clean-up projectsDokument2 SeitenSK council discusses urban gardening and clean-up projectsSK PinagsamaNoch keine Bewertungen
- Henderson V Broadus Complaint)Dokument52 SeitenHenderson V Broadus Complaint)Christopher S. HarrisonNoch keine Bewertungen
- AWS D1.5/D1.5M Bridge Welding Code ChangesDokument36 SeitenAWS D1.5/D1.5M Bridge Welding Code ChangesedwinNoch keine Bewertungen
- Case Study 4: Rescuing NissanDokument3 SeitenCase Study 4: Rescuing NissanAngel GondaNoch keine Bewertungen
- Semiconductor KIA1117BS/BF/BPI00 KIA1117BS/BF/BPI50: Technical DataDokument6 SeitenSemiconductor KIA1117BS/BF/BPI00 KIA1117BS/BF/BPI50: Technical DataRadu PaulNoch keine Bewertungen
- Penilaian Risiko Pada Onshore Pipeline Menggunakan Metode RiskDokument6 SeitenPenilaian Risiko Pada Onshore Pipeline Menggunakan Metode RiskAksanul's CreatorNoch keine Bewertungen
- Nihon Kohden Cns 6201 Administrator S Guide PDFDokument171 SeitenNihon Kohden Cns 6201 Administrator S Guide PDFjhon edison rojas villadaNoch keine Bewertungen
- MSE 440/540 Surface Processing LecturesDokument38 SeitenMSE 440/540 Surface Processing LecturesrustyryanbradNoch keine Bewertungen
- Project Designer Site Plan & Floor PlansDokument2 SeitenProject Designer Site Plan & Floor PlansAlan LiNoch keine Bewertungen
- Machine Learning Assignment Differences Between Linear And Logistic RegressionDokument4 SeitenMachine Learning Assignment Differences Between Linear And Logistic Regressionbharti goyalNoch keine Bewertungen
- Application of ISO/IEC 17020:2012 For The Accreditation of Inspection BodiesDokument17 SeitenApplication of ISO/IEC 17020:2012 For The Accreditation of Inspection BodiesinninninnNoch keine Bewertungen
- ABS Rule EarthingDokument1 SeiteABS Rule Earthing우승환Woo seung hwanNoch keine Bewertungen
- 013ADokument2 Seiten013ACkaal74Noch keine Bewertungen
- Government Procurement Reform Act under RA 9184Dokument50 SeitenGovernment Procurement Reform Act under RA 9184Maricel Anober100% (1)
- Robein E. Velocities, Time-Imaging and Depth-Imaging Principles and Methods (60 PDFDokument462 SeitenRobein E. Velocities, Time-Imaging and Depth-Imaging Principles and Methods (60 PDFleonardoNoch keine Bewertungen
- Myocarditis and PericarditisDokument28 SeitenMyocarditis and PericarditisMahesh RathnayakeNoch keine Bewertungen
- Apela - Learners - Handbook - L3-L7 - 120721Dokument34 SeitenApela - Learners - Handbook - L3-L7 - 120721shahrol effendy rodziNoch keine Bewertungen
- L3510 BaldorDokument11 SeitenL3510 BaldorAbraham VillanuevaNoch keine Bewertungen
- DVR - KPD674ZBDokument2 SeitenDVR - KPD674ZBReinaldo SandimNoch keine Bewertungen
- Alat Kesehatan Dalam Bahasa InggrisDokument19 SeitenAlat Kesehatan Dalam Bahasa InggrisAriska Oktavera 26Noch keine Bewertungen
- Development of Automatic Temperature Control Brooder System For ChicksDokument73 SeitenDevelopment of Automatic Temperature Control Brooder System For ChicksEJ D. ManlangitNoch keine Bewertungen
- Level5 3 Way 4 Way SwitchesDokument2 SeitenLevel5 3 Way 4 Way SwitchesEulin RjayNoch keine Bewertungen
- City Union Bank Inspection ReportDokument114 SeitenCity Union Bank Inspection ReportMoneylife Foundation100% (1)
- Relational Title Money QuizDokument2 SeitenRelational Title Money Quizhoxx82Noch keine Bewertungen
- Folletos de BibliotecaDokument2 SeitenFolletos de BibliotecaCFBISDNoch keine Bewertungen