Das könnte Ihnen auch gefallen
- Wi-Fi Home AutomationDokument23 SeitenWi-Fi Home Automationchandru_8Noch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsVon EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsBewertung: 3 von 5 Sternen3/5 (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- AVK Report ChecklistDokument19 SeitenAVK Report ChecklistparthvasavadaNoch keine Bewertungen
- 555 Timer and Its ApplicationsDokument48 Seiten555 Timer and Its ApplicationsJohnny Walker100% (8)
- Motor Protection Circuit Breaker Design BasicsDokument15 SeitenMotor Protection Circuit Breaker Design BasicsKI OHNoch keine Bewertungen
- E L RelayDokument31 SeitenE L RelayBal SubramaniNoch keine Bewertungen
- RF Controlled ApplianceDokument14 SeitenRF Controlled ApplianceNEX456Noch keine Bewertungen
- EE082-Fault Finding in Electrical Control Systems-Th-Inst PDFDokument78 SeitenEE082-Fault Finding in Electrical Control Systems-Th-Inst PDFSameera Kodikara100% (2)
- Heater & Air ConditionerDokument104 SeitenHeater & Air ConditionerMusat Catalin-Marian100% (1)
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionNoch keine Bewertungen
- Body Electrical Diagnosis: Quick Training Guide - QT611ADokument10 SeitenBody Electrical Diagnosis: Quick Training Guide - QT611AThang TongNoch keine Bewertungen
- Review of a simple adjustable power supply using linear and switching componentsDokument4 SeitenReview of a simple adjustable power supply using linear and switching componentsramesh ranjitNoch keine Bewertungen
- Analog IC Design With Low-Dropout RegulatorsDokument374 SeitenAnalog IC Design With Low-Dropout Regulatorsberbou100% (2)
- DiDokument6 SeitenDipani256Noch keine Bewertungen
- 0-30 VDC Stabilized Power Supply With Current Control 0.002-3 ADokument12 Seiten0-30 VDC Stabilized Power Supply With Current Control 0.002-3 Anmgaby21Noch keine Bewertungen
- Chapter 7 Mosfets in Ics - Scaling, Leakage, and Other TopicsDokument43 SeitenChapter 7 Mosfets in Ics - Scaling, Leakage, and Other Topicsmorcov19Noch keine Bewertungen
- Amplificatoare Audio PhilipsDokument55 SeitenAmplificatoare Audio Philipsalex061989100% (3)
- AN108A Inductive Load Arc SuppressionDokument3 SeitenAN108A Inductive Load Arc SuppressionihsanjuNoch keine Bewertungen
- M03-001 - Heat TransferDokument40 SeitenM03-001 - Heat TransferjadewestNoch keine Bewertungen
- Regulated DC Power Supply Lab AssignmentDokument17 SeitenRegulated DC Power Supply Lab AssignmentSebastien Paul100% (1)
- Electromagnetic Effects of Overhead Transmission LinesDokument13 SeitenElectromagnetic Effects of Overhead Transmission Linesshawnr7376Noch keine Bewertungen
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionBewertung: 5 von 5 Sternen5/5 (1)
- Electronics Code Lock Using One TransistorDokument18 SeitenElectronics Code Lock Using One TransistorAnonymous TvXDUWDaol50% (2)
- Compatibility of Analog Signals For Electronic Industrial Process InstrumentsDokument20 SeitenCompatibility of Analog Signals For Electronic Industrial Process InstrumentsFrancisco MoyaNoch keine Bewertungen
- Gabriel Rincon-Mora-Analog IC Design With Low-Dropout Regulators (LDOs) (Electronic Engineering) (2009) PDFDokument373 SeitenGabriel Rincon-Mora-Analog IC Design With Low-Dropout Regulators (LDOs) (Electronic Engineering) (2009) PDFNguyen HaNoch keine Bewertungen
- BasicThermal AnalysisDokument24 SeitenBasicThermal AnalysisUdayakumar VengatesanNoch keine Bewertungen
- Vaillant boiler installation diagram conditionsDokument20 SeitenVaillant boiler installation diagram conditionsMark MaxwellNoch keine Bewertungen
- Capacitor Less LdoDokument11 SeitenCapacitor Less LdoantharmukiNoch keine Bewertungen
- New Medium Voltage Circuit-Breaker Switchgear With Advanced FunctionalityDokument4 SeitenNew Medium Voltage Circuit-Breaker Switchgear With Advanced Functionalityemy1188Noch keine Bewertungen
- Snubber Circuits Suppress Voltage Transient Spikes in Multiple Output DC-DC Flyback Converter Power SuppliesDokument11 SeitenSnubber Circuits Suppress Voltage Transient Spikes in Multiple Output DC-DC Flyback Converter Power SuppliesPlatin1976Noch keine Bewertungen
- Cmos Latch UpDokument3 SeitenCmos Latch UpSiddharth SabharwalNoch keine Bewertungen
- Triac ControlDokument6 SeitenTriac ControlSyaiful BakhriNoch keine Bewertungen
- Interposing Relay InformationDokument3 SeitenInterposing Relay Informationsaswati01Noch keine Bewertungen
- Finder General Technical Information enDokument14 SeitenFinder General Technical Information enenerconNoch keine Bewertungen
- Buck Converter Design DemystifiedDokument6 SeitenBuck Converter Design DemystifiedEric MorissetNoch keine Bewertungen
- Electrical Engineering Interview Questions Set-2: What Are The Different Operation Regions of The SCR?Dokument9 SeitenElectrical Engineering Interview Questions Set-2: What Are The Different Operation Regions of The SCR?Uzair AfridiNoch keine Bewertungen
- Induction Motor Protection For Single Phasing, Overvoltage and Over TemperatureDokument13 SeitenInduction Motor Protection For Single Phasing, Overvoltage and Over Temperatureصدام حسینNoch keine Bewertungen
- Power ConverterDokument26 SeitenPower Converterhardih123Noch keine Bewertungen
- Another Interesting Circuit From Burt Design PadDokument13 SeitenAnother Interesting Circuit From Burt Design PadmoisesHolaNoch keine Bewertungen
- Article 50 Ijaet Volii Issue IV Oct Dec 2011Dokument6 SeitenArticle 50 Ijaet Volii Issue IV Oct Dec 2011Pradyumna PooskuruNoch keine Bewertungen
- Light Dimmer Circuit: The Ideal Triggering DeviceDokument4 SeitenLight Dimmer Circuit: The Ideal Triggering DeviceEmmanuel MiguelNoch keine Bewertungen
- Automatic Changeover SwitchDokument16 SeitenAutomatic Changeover SwitchAjaySharma100% (1)
- Automated Unified System For LPG UsingDokument84 SeitenAutomated Unified System For LPG UsingVirat KaliNoch keine Bewertungen
- 3.1 Block Diagram & Components Description:: Fig: 3.1 Block Diagram of Cyclo-Converter Using MicrocontrollerDokument10 Seiten3.1 Block Diagram & Components Description:: Fig: 3.1 Block Diagram of Cyclo-Converter Using MicrocontrollerSwamyNoch keine Bewertungen
- Protect loads from over and under voltagesDokument6 SeitenProtect loads from over and under voltagesRika Elvan YulindaNoch keine Bewertungen
- Touch Switch Project ReportDokument13 SeitenTouch Switch Project ReportGaurav Kumar60% (15)
- Electrical Ratings: Rerating Current For Switches With 125V Ac RatingsDokument3 SeitenElectrical Ratings: Rerating Current For Switches With 125V Ac Ratingskvp0107Noch keine Bewertungen
- Detect Underground Cable Faults Using ArduinoDokument19 SeitenDetect Underground Cable Faults Using ArduinoPrajjwal SrivastavaNoch keine Bewertungen
- Snubber DesignDokument4 SeitenSnubber DesignSaffatt Al MansoorNoch keine Bewertungen
- Hardware Implementation: 3.1 Block Diagram & Components DescriptionDokument10 SeitenHardware Implementation: 3.1 Block Diagram & Components DescriptionRajaiah JagariNoch keine Bewertungen
- Controlled Switching of High-Voltage Circuit-Breakers: Power Transmission and DistributionDokument6 SeitenControlled Switching of High-Voltage Circuit-Breakers: Power Transmission and DistributionNilthonNoch keine Bewertungen
- An 18Dokument12 SeitenAn 18teomondoNoch keine Bewertungen
- AN848 DynamicDokument9 SeitenAN848 DynamicAnonymous QakmLc3kTINoch keine Bewertungen
- Power-Electronics Ktuonline - in PDFDokument68 SeitenPower-Electronics Ktuonline - in PDFchippyviswanNoch keine Bewertungen
- 2001jun15 Amd An2015Dokument8 Seiten2001jun15 Amd An2015Saurabh BhiseNoch keine Bewertungen
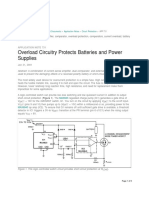
- Overload Circuitry Protects Batteries and Power SuppliesDokument3 SeitenOverload Circuitry Protects Batteries and Power SuppliesRafałSzewcNoch keine Bewertungen
- An 6076Dokument13 SeitenAn 6076Khúc Hành QuânNoch keine Bewertungen
- 9.eee Ijeee Two Phase Interleaved DC SumalathaDokument16 Seiten9.eee Ijeee Two Phase Interleaved DC Sumalathaiaset123Noch keine Bewertungen
- ARCP Converter Enables Soft Switching Without Increased Device RatingsDokument8 SeitenARCP Converter Enables Soft Switching Without Increased Device RatingsAjit JainNoch keine Bewertungen
- 1MRG008054 en Application Note Function Description For High Impedance Busbar ProtectionDokument13 Seiten1MRG008054 en Application Note Function Description For High Impedance Busbar ProtectionOsama Ahmad Chaudhary100% (1)
- Electric Power Voltage: Sag SolutionsDokument14 SeitenElectric Power Voltage: Sag SolutionsRamiz RazaNoch keine Bewertungen
- Circuits Controlling Relays PageDokument5 SeitenCircuits Controlling Relays PageBenjamin DoverNoch keine Bewertungen
- Analog SwitchDokument14 SeitenAnalog SwitchfavamaoNoch keine Bewertungen
- Basic Switching-Regulator-Layout Techniques: GroundDokument8 SeitenBasic Switching-Regulator-Layout Techniques: GroundJonathan JaegerNoch keine Bewertungen
- 0-30 VDC Stabilized Power Supply With CurrentDokument8 Seiten0-30 VDC Stabilized Power Supply With CurrentDavid ReyesNoch keine Bewertungen
- Verification Methods of Snubber Circuits in Flyback ConvertersDokument37 SeitenVerification Methods of Snubber Circuits in Flyback ConvertersAydcon SccNoch keine Bewertungen
- 20977-Article Text-63774-1-10-20180626Dokument8 Seiten20977-Article Text-63774-1-10-20180626gürcan EserNoch keine Bewertungen
- Supplementary Components and System: Engr - Kashif IqbalDokument21 SeitenSupplementary Components and System: Engr - Kashif IqbalHassan Bin QasimNoch keine Bewertungen
- 1ZSC000562-ACB enDokument2 Seiten1ZSC000562-ACB end.c.delatorre2200Noch keine Bewertungen
- Rectificador de Presición - National PDFDokument2 SeitenRectificador de Presición - National PDFd.c.delatorre2200Noch keine Bewertungen
- 1ZSC000562-ACU en Rev A (Spare Parts UZ) - Low Resolution PDFDokument24 Seiten1ZSC000562-ACU en Rev A (Spare Parts UZ) - Low Resolution PDFd.c.delatorre2200Noch keine Bewertungen
- 1ZSC000562-ACU en Rev A (Spare Parts UZ) - Low Resolution PDFDokument24 Seiten1ZSC000562-ACU en Rev A (Spare Parts UZ) - Low Resolution PDFd.c.delatorre2200Noch keine Bewertungen
- I2C Bus ManualDokument51 SeitenI2C Bus Manualapi-26349602100% (6)
- Circuit-Protection-Con Polyswitch-Fundamentals PDFDokument13 SeitenCircuit-Protection-Con Polyswitch-Fundamentals PDFd.c.delatorre2200Noch keine Bewertungen
- Adquisición Variables AmbientalesDokument2 SeitenAdquisición Variables Ambientalesd.c.delatorre2200Noch keine Bewertungen
- State of Charge of An BateryDokument69 SeitenState of Charge of An BateryBogdan AdeleanNoch keine Bewertungen
- ESP8266 SpecificationsDokument23 SeitenESP8266 SpecificationsMarcelo Caamaño100% (1)
- ADS1240EDokument23 SeitenADS1240Ed.c.delatorre2200Noch keine Bewertungen
- Honeywell T8024Dokument12 SeitenHoneywell T8024d.c.delatorre2200Noch keine Bewertungen
- Chip Inductor (Chip Coil) : Power Inductor (Wire Wound Type) LQH55P Series (2220 Size)Dokument2 SeitenChip Inductor (Chip Coil) : Power Inductor (Wire Wound Type) LQH55P Series (2220 Size)d.c.delatorre2200Noch keine Bewertungen
- Honeywell T8024Dokument12 SeitenHoneywell T8024d.c.delatorre2200Noch keine Bewertungen
- I C-Bus Specification and User ManualDokument50 SeitenI C-Bus Specification and User ManualAll4UyenNoch keine Bewertungen
- ADC12130CINDokument40 SeitenADC12130CINd.c.delatorre2200Noch keine Bewertungen
- ACS712 DatasheetDokument15 SeitenACS712 DatasheetwirawansatriaNoch keine Bewertungen
- 68HC908JK JLPBDokument2 Seiten68HC908JK JLPBd.c.delatorre2200Noch keine Bewertungen
- 2N2219 BJT SwitchDokument6 Seiten2N2219 BJT Switchfsahmed100% (1)
- Aplicación de Boot Step UpDokument4 SeitenAplicación de Boot Step Upd.c.delatorre2200Noch keine Bewertungen
- Atmega 8 ADokument307 SeitenAtmega 8 ACosmin NicolauNoch keine Bewertungen
- 2SK2903-01MR: N-Channel Silicon Power Mos-FetDokument5 Seiten2SK2903-01MR: N-Channel Silicon Power Mos-FetPhan Anh TuanNoch keine Bewertungen
- 2SK2632LS: Ultrahigh-Speed Switching ApplicationsDokument5 Seiten2SK2632LS: Ultrahigh-Speed Switching Applicationsd.c.delatorre2200Noch keine Bewertungen
- MPXHZ6115ADokument17 SeitenMPXHZ6115Ad.c.delatorre2200Noch keine Bewertungen
- WM8775SEDSDokument36 SeitenWM8775SEDSd.c.delatorre2200Noch keine Bewertungen
- Ads 1256Dokument45 SeitenAds 1256d.c.delatorre2200Noch keine Bewertungen
- APC200Dokument8 SeitenAPC200d.c.delatorre2200Noch keine Bewertungen
- ADS125 XDokument16 SeitenADS125 Xd.c.delatorre2200Noch keine Bewertungen
- 4500 Series VW PiezometersDokument4 Seiten4500 Series VW PiezometersMaLik ChowNoch keine Bewertungen
- Electric Tricycle Project (2004 FDR)Dokument32 SeitenElectric Tricycle Project (2004 FDR)José GonzálezNoch keine Bewertungen
- Understanding Basic Electrical ComponentsDokument12 SeitenUnderstanding Basic Electrical ComponentsDhedy RahmatNoch keine Bewertungen
- Hightest - ARES-200, 200 A DC MICRO-OHM METER - Ares 2betaDokument4 SeitenHightest - ARES-200, 200 A DC MICRO-OHM METER - Ares 2betahightestNoch keine Bewertungen
- Mathmatics and Physics 1 (Versie 7 Okt 2019) PDFDokument250 SeitenMathmatics and Physics 1 (Versie 7 Okt 2019) PDFŁukasz MorozNoch keine Bewertungen
- MosfetDokument7 SeitenMosfetwahyunuryantoNoch keine Bewertungen
- Training Matrix EPAS NC IIDokument4 SeitenTraining Matrix EPAS NC IITeckii MSOfficeNoch keine Bewertungen
- Lab Report 6Dokument9 SeitenLab Report 6Hamid kamranNoch keine Bewertungen
- Power Electronics (MTE222) : Lecture Week1&2Dokument29 SeitenPower Electronics (MTE222) : Lecture Week1&2Omar Adel MohammedNoch keine Bewertungen
- ISOMETER® IR145Y - : Insulation Monitoring Device For Unearthed AC, DC and AC/DC Systems (IT Systems)Dokument4 SeitenISOMETER® IR145Y - : Insulation Monitoring Device For Unearthed AC, DC and AC/DC Systems (IT Systems)William moreNoch keine Bewertungen
- 9A02305 Electrical CircuitsDokument8 Seiten9A02305 Electrical CircuitssivabharathamurthyNoch keine Bewertungen
- Measurement and Instrumentation LaboratoryDokument8 SeitenMeasurement and Instrumentation LaboratoryAbu hanif RobinNoch keine Bewertungen
- Electricalenergygenerator PDFDokument7 SeitenElectricalenergygenerator PDFAzies RosickyNoch keine Bewertungen
- Eland Cables Power Networks CatalogueDokument68 SeitenEland Cables Power Networks CatalogueRyo TevezNoch keine Bewertungen
- Second Quarter Periodical Test - ElectronicsDokument3 SeitenSecond Quarter Periodical Test - ElectronicsBuenavides P. Gerundio Jr.100% (1)
- Medium Lines, ABCD Cons With ProblemsDokument31 SeitenMedium Lines, ABCD Cons With ProblemsAreyan HaqueNoch keine Bewertungen
- LE40C750R2ZXZG PartList PDFDokument9 SeitenLE40C750R2ZXZG PartList PDFjimkarnoNoch keine Bewertungen
- Activities 1 To 6Dokument13 SeitenActivities 1 To 6SubhaNoch keine Bewertungen
- Experiment No: 1 Date: / / 20Dokument20 SeitenExperiment No: 1 Date: / / 20programmerNoch keine Bewertungen
- Varactor Diode Capacitance Controlled by Reverse Bias VoltageDokument3 SeitenVaractor Diode Capacitance Controlled by Reverse Bias VoltageJess Christian BrionesNoch keine Bewertungen
- EthanolDokument2 SeitenEthanolHamdan PrakosoNoch keine Bewertungen