Das könnte Ihnen auch gefallen
- Presentacion Del Curso Vibraciones y Cimentacion de MaquinasDokument25 SeitenPresentacion Del Curso Vibraciones y Cimentacion de MaquinasSebastian AlarconNoch keine Bewertungen
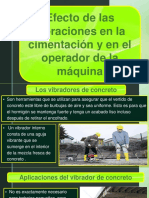
- Efecto de Las Vibraciones en La Cimentación y en El Operador de La Máquina 1Dokument28 SeitenEfecto de Las Vibraciones en La Cimentación y en El Operador de La Máquina 1Sebastian AlarconNoch keine Bewertungen
- Evaluación de Las Vibraciones Globales Transmitidas A Trabajadores en Una Empresa Agroindustrial Productora de AzúcarDokument22 SeitenEvaluación de Las Vibraciones Globales Transmitidas A Trabajadores en Una Empresa Agroindustrial Productora de AzúcarSebastian AlarconNoch keine Bewertungen
- Capacidad de Carga UltimaDokument18 SeitenCapacidad de Carga UltimaSebastian AlarconNoch keine Bewertungen
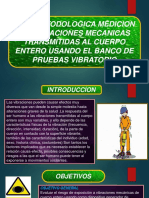
- Guia Metodologica Medicion de Vibraciones Mecanicas Transmitidas Al Cuerpo Entero Usando El Banco de Pruebas VibratorioDokument28 SeitenGuia Metodologica Medicion de Vibraciones Mecanicas Transmitidas Al Cuerpo Entero Usando El Banco de Pruebas VibratorioSebastian AlarconNoch keine Bewertungen
- Riesgo de Las Vibraciones Mecánicas y Los Métodos de Evaluacion Por Estimación y MediciónDokument29 SeitenRiesgo de Las Vibraciones Mecánicas y Los Métodos de Evaluacion Por Estimación y MediciónSebastian Alarcon100% (1)
- PREVIADokument19 SeitenPREVIASebastian AlarconNoch keine Bewertungen
- Memoria 53201114Dokument182 SeitenMemoria 53201114Sebastian AlarconNoch keine Bewertungen
- Problemas Parte II-1Dokument8 SeitenProblemas Parte II-1Sebastian Alarcon100% (1)
- Caso PetrobrasDokument24 SeitenCaso PetrobrasSebastian AlarconNoch keine Bewertungen
- Aleaciones LigerasDokument10 SeitenAleaciones LigerasSebastian AlarconNoch keine Bewertungen
- Identificación de Los Desórdenes Musculo Esqueléticos en Miembros SuperioresDokument26 SeitenIdentificación de Los Desórdenes Musculo Esqueléticos en Miembros SuperioresSebastian AlarconNoch keine Bewertungen
- Silabo de Fisica Molecular - Ingenieria MecanicaDokument8 SeitenSilabo de Fisica Molecular - Ingenieria MecanicaSebastian AlarconNoch keine Bewertungen
- S5 Trabajo y EnergíaDokument4 SeitenS5 Trabajo y EnergíaSebastian Alarcon100% (2)
- Presion 17Dokument80 SeitenPresion 17Sebastian AlarconNoch keine Bewertungen
- Fuerzas y Aceleraciones 2Dokument4 SeitenFuerzas y Aceleraciones 2Sebastian AlarconNoch keine Bewertungen
- S4 - Problemas de Fuerzas y Aceleraciones 2Dokument4 SeitenS4 - Problemas de Fuerzas y Aceleraciones 2Sebastian AlarconNoch keine Bewertungen
- Presion 17Dokument80 SeitenPresion 17Sebastian AlarconNoch keine Bewertungen
- Problemas de Fuerzas y AceleracionesDokument8 SeitenProblemas de Fuerzas y AceleracionesSebastian Alarcon100% (1)
- 2 Problemas de Cinemática de Partícula 2Dokument11 Seiten2 Problemas de Cinemática de Partícula 2Sebastian Alarcon100% (1)
- Lista Matriculados 2016IIDokument551 SeitenLista Matriculados 2016IISebastian AlarconNoch keine Bewertungen
- Transformaciones LinealesDokument16 SeitenTransformaciones LinealesSebastian Alarcon100% (1)
- 2 Problemas de Cinemática de Partícula 2Dokument11 Seiten2 Problemas de Cinemática de Partícula 2Sebastian Alarcon100% (1)
- Aserrado Manual y MecanicoDokument9 SeitenAserrado Manual y MecanicorozureNoch keine Bewertungen
- Dobladora de ArosDokument25 SeitenDobladora de ArosLuis Manuel Celis RuizNoch keine Bewertungen
- OG - CT - PR-028 - Izaje de Cargas Cruces de Via y Ganado2Dokument22 SeitenOG - CT - PR-028 - Izaje de Cargas Cruces de Via y Ganado2Miguel Andres Diaz SierraNoch keine Bewertungen
- Informe de Dureza PDFDokument7 SeitenInforme de Dureza PDFKevin david De moya torresNoch keine Bewertungen
- Cantera Jibito-SullanaDokument12 SeitenCantera Jibito-SullanaChristian Paul Cruz Anton100% (1)
- U2 - Act - 01 - Eq5 - Problemario Simulación Propiedades Mecánicas PDFDokument17 SeitenU2 - Act - 01 - Eq5 - Problemario Simulación Propiedades Mecánicas PDFJuan QuintanaNoch keine Bewertungen
- GPE-16 Calculo de Encofrados PDFDokument49 SeitenGPE-16 Calculo de Encofrados PDFMary PeñaNoch keine Bewertungen
- Modificacion Norma UNE 60670 Gas NaturalDokument55 SeitenModificacion Norma UNE 60670 Gas NaturalEmilio Gutiérrez RamírezNoch keine Bewertungen
- Manual de Paleros Mina ConvrncionalDokument16 SeitenManual de Paleros Mina ConvrncionalEmerson Ordoñez MejiaNoch keine Bewertungen
- Taladros Flushby Servisuministros GyFDokument2 SeitenTaladros Flushby Servisuministros GyFLeonid AntonyNoch keine Bewertungen
- Plan de TrabajoDokument4 SeitenPlan de TrabajoJacob QCNoch keine Bewertungen
- Elaboracion de Frutas en AlmibarDokument7 SeitenElaboracion de Frutas en AlmibarRacso Ramírez carmonaNoch keine Bewertungen
- SSPC Guia 11 TraduccionDokument6 SeitenSSPC Guia 11 TraduccionjorgepetroleoNoch keine Bewertungen
- 1 Fabricacion y Denominacion de Los AcerosDokument41 Seiten1 Fabricacion y Denominacion de Los AcerosEdson Eduardo Medina de la Cruz100% (2)
- Anexo 01 - Materiales en La IndustriaDokument13 SeitenAnexo 01 - Materiales en La IndustriaLesly MartinezNoch keine Bewertungen
- PeletizadoDokument14 SeitenPeletizadoNicole ValeriaNoch keine Bewertungen
- DEFORMACIONDokument15 SeitenDEFORMACIONYAN ELIO MANRIQUE MOGOLLONNoch keine Bewertungen
- Actividad de Aprendizaje para Desarrollo de Contenidos-Propiedades MecánicasDokument4 SeitenActividad de Aprendizaje para Desarrollo de Contenidos-Propiedades MecánicasronnyNoch keine Bewertungen
- Vigas CompuestasDokument14 SeitenVigas CompuestasEduardo Garcia Siancas0% (3)
- PDF Elevador A Cangilones DLDokument93 SeitenPDF Elevador A Cangilones DLmiguel garciaNoch keine Bewertungen
- P-LNCIZNOM - 90 (REV 2) PEROCEDIMIENTO Montaje de Transformadores Con Grúa HorquillaDokument30 SeitenP-LNCIZNOM - 90 (REV 2) PEROCEDIMIENTO Montaje de Transformadores Con Grúa HorquillaJoselo'VidalCeballosNoch keine Bewertungen
- Aceros InoxidablesDokument10 SeitenAceros InoxidablesJose RodriquezNoch keine Bewertungen
- Naves IndustrialesDokument40 SeitenNaves IndustrialesDiego RuizNoch keine Bewertungen
- Sistema DrywallDokument12 SeitenSistema DrywallRoy Alarcon HuancaNoch keine Bewertungen
- Proyecto PCRDokument10 SeitenProyecto PCRSebastián MedinaNoch keine Bewertungen
- Informe de PasantiasDokument74 SeitenInforme de Pasantiasdaniel villaNoch keine Bewertungen
- Industria Acerera MéxicoDokument7 SeitenIndustria Acerera MéxicoEDERrbNoch keine Bewertungen
- Básculas para Vehículos (Folleto Técnico)Dokument6 SeitenBásculas para Vehículos (Folleto Técnico)Michael ObrayanNoch keine Bewertungen
- Resort EsDokument20 SeitenResort EsJohn Flores ramosNoch keine Bewertungen
- Catalogo Alambres Sólidos GMAW-GTAWDokument20 SeitenCatalogo Alambres Sólidos GMAW-GTAWLeyniz York Arias LlanosNoch keine Bewertungen